موتورهای رلوکتانس سوئیچ شونده
موتور رلوکتانسی
موتور رلوکتانس سوئیچ شونده ( موتور مقاومت مغناطیسی سوئیچی – SRM) نوعی موتور پله ای است، یک موتور الکتریکی که با گشتاور رلوکتانس راه اندازی می شود.
Switched reluctance motor
موتور رلوکتانسی
برخلاف انواع معمول موتورهای DC، قدرت، بجای روتور (سیم پیچ ثانویه)، به سیم پیچی استاتور انتقال داده می شود.
این موضوع می تواند تا حد زیادی باعث ساده شدن طراحی مکانیکی شود زیرا دیگر لازم نیست قدرت به یک بخش در حال حرکت فرستاده شود،
اما موجب پیچیدگی طراحی الکتریکی خواهد شد چون لازم است برخی از بخش های سیستم سوئیچینگ برای انتقال قدرت به سیم پیچ های متفاوت، مورد استفاده قرار گیرند.
با دستگاه های الکترونیکی مدرن، دیگر سوییچینگ دقیق و بهنگام یک مشکل نخواهد بود،
و موتور رلوکتانس سوئیچ شونده، یک طراحی معمول برای موتورهای پله ای مدرن است. اشکال یا ضعف اصلی آن، ریپل گشتاور است.
اصول عملیاتی موتور رلوکتانسی SRM
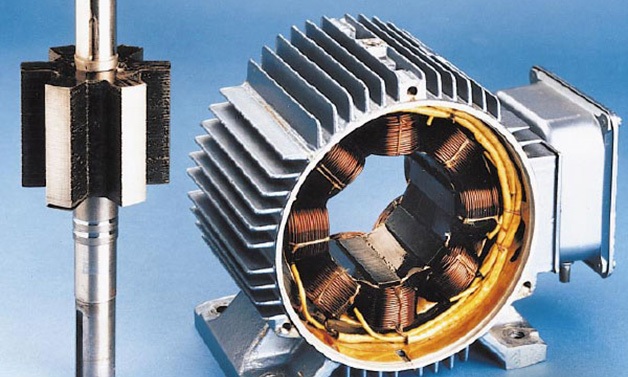
موتورهای رلوکتانس سوئیچ شونده (SRM)، مانند یک موتور DC، برای سیم پیچی استاتور دارای میدانی با سیم پیچ های پیچیده شده است. با این حال، روتور دارای هیچ گونه آهن ربا و یا سیم پیچ متصل شده ای نمی باشد. این یک رتور جامد با قطب برجسته (با داشتن طرح قطب مغناطیسی) است که از مواد مغناطیسی نرم ساخته شده (اغلب لمینت فولاد).
4 نوع از موتورهای DC و مشخصات آنها
زمانی که برق به سیم پیچ استاتور اعمال می شود، رلوکتانس مغناطیسی روتور، نیرویی را با هدف همراستا سازی قطب روتور با نزدیکترین قطب استاتور ایجاد می کند.
به منظور حفظ چرخش، یک سیستم کنترل الکترونیکی بر سیم پیچ های متوالی قطب استاتور بطور پی در پی اعمال می شود بطوری که میدان مغناطیسی استاتور، “منجر به” جلو کشیده شدن قطب روتور می شود.
به جای استفاده از یک کموتاتور مکانیکی پردردسر (با سطوح کیفی بالایی از تعمیر و نگهداری) برای سوئیچنگ جریان سیم پیچ، مانند موتور های سنتی، موتورهای رلوکتانس سوئیچ شونده از یک سنسور موقعیت الکترونیکی (انکودر) Encoder برای تعیین زاویه شفت روتور و الکترونیک حالت جامد استفاده می کنند تا سویچینگ سیم پیچ های استاتور انجام شود، که همچنین فرصتی را برای کنترل دینامیکی زمان و شکل دهی پالس ارائه می دهد.
این موضوع در موتور القایی با ظاهری مشابه متفاوت است،
موتوری که سیم پیچ آن در یک توالی فاز چرخشی انرژی دار شده.
در این حالت، مغناطیسی شدن روتور، استاتیکی است (یک قطب برجسته با جهت شمال در زمان چرخش موتور) این در حالی است که یک موتور القایی لغزش داشته و با سرعتی که اندکی کمتر از سرعت سنکرون است می چرخد.
عدم لغزش این امکان را فراهم می کند که موقعیت دقیق روتور مشخص شود و موتور می تواند خودسرانه به آرامی پیش برود.
مشخصات و اصول کار موتور رلوکتانسی سوئیج شونده (SR)-بخش 1
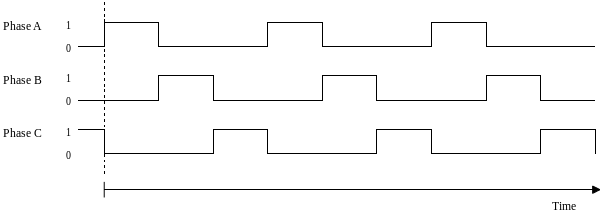
سوئیچینگ ساده
اگر قطب های A0 و A1 انرژی دار شوند، آنگاه روتور خود را با این دو قطب همراستا می کند.
در این هنگام، ممکن است قطب های استاتور، قبل از اینکه قطب های استاتور B0 و B1 انرژی دار شوند، تخلیه انرژی شوند.




در حال حاضر روتور در قطب استاتور b قرار گرفته است.
این توالی قبل از برگشتن به نقطه شروع، از طریق C ادامه پیدا می کند.
همچنین این توالی می تواند برای دست یابی به حرکت در جهت مخالف، معکوس شود.
این توالی می تواند ناپایدار باشد ( نیاز به رفع ابهام دارد) در حالی که در عمل، تحت بار بالا و شتاب یا کاهش سرعت بالا، ممکن است یکی از مراحل از دست برود و روتور به زاویه اشتباه جهش کند، شاید بجای 3 مرحله جلو رفتن، 1 مرحله به عقب بر گردد.
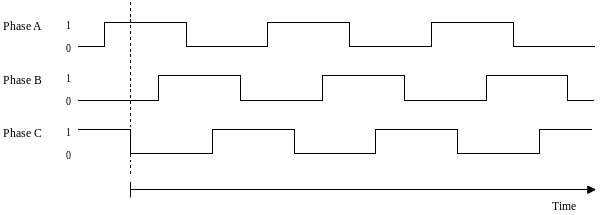
توالی بهبود یافته
با استفاده از توالی ربعی زیر می توان به سیستمی پایدارتر دست یافت. ابتدا قطب های استاتور A0 و A1 انرژی دار می شوند.
آنگاه به قطب های استاتور B0 و B1 انرژی می رسد که باعث کشیده شدن روتور می شود،
بطوری که همراستا با قطب های استاتور A و B خواهد بود.
به دنبال آن قطب های A تخلیه انرژی می شوند
و روتور تا زمان همراستا شدن با قطب استاتور B بکار خود ادامه می دهد.
این توالی بین BC ، C و CA ، قبل از اینکه چرخش کامل رخ دهد ادامه می یابد.
همچنین این توالی می تواند برای بدست آوردن حرکت در جهت مخالف، معکوس شود.
از آنجایی که در هر زمان، به دو سیم پیچ انرژی داده می شود و مراحل بیشتری بین موقعیت هایی با خواص مغناطیسی یکسان وجود دارد.
بنابراین، شروع به از دست رفتن مراحل در سرعت یا بار بالا رخ خواهد داد.
علاوه بر عملکردی پایدارتر، این روند یک توالی یا ترتیب خوب زمانی را ارائه می دهد
زیرا زمانبندی فازها، بجای اینکه در یک نسبت 1 به 2 ( مانند یک توالی ساده تر) باشد، در هر دو حالت روشن و خاموش یکسان است.
کنترل
سیستم کنترل (درایو) مسئول دادن پالس های متوالی مورد نیاز به جریان برق است ، تا فازها در صورت لزوم فعال سازی شوند. در حالی که انجام این کار با استفاده از ابزار الکترو مکانیکی، مانند کموتاتورها و یا آنالوگ ساده یا مدارهای زمان دیجیتال، ممکن می باشد، اعمال کنترل بیشتر با استفاده از روش های پیشرفته تر امکان پذیر خواهد بود.
مشخصات و اصول کار موتور رلوکتانسی سوئیج شونده (SR)-بخش 1
بسیاری از کنترل کننده ها، بجای اجزای الکترومکانیکی در پیاده سازی خود، از کنترل کننده های منطقی قابل برنامه ریزی ترکیبی استفاده می کنند. یک میکروکنترلر نیز برای این نوع کاربرد ایده آل است زیرا امکان کنترل بسیار دقیقی از زمان بندی فعال شدن فاز را فراهم می سازد. همچنین اجرای یک تابع راه انداز نرم را در قالب نرم افزار، امکان پذیر می سازد، تا میزان سخت افزار مورد نیاز کاهش یابد.
جریان برق
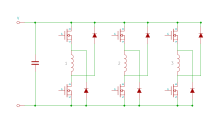
رایج ترین رویکرد برای تأمین انرژی یک موتور رلوکتانس سوئیچ شونده، استفاده از یک مبدل پل نامتقارن است.
سه فاز در یک مبدل پل نامتقارن وجود دارد که به فازهای موتور رلوکتانس سوئیچ شونده مربوط می شوند.
اگر هر دو سوئیچ قدرت در دو طرف فاز روشن شود، آنگاه فاز مربوطه باید فعال شود.
زمانی که جریان به مقداری بالاتر از مقدار تعیین شده افزایش یافته ، سوئیچ باید خاموش شود.
انرژی که در حال حاضر در سیم پیچ موتور ذخیره شده،
باید تا زمانی که انرژی تخلیه شود، بطریقی مشابه، جریان را حفظ کند.
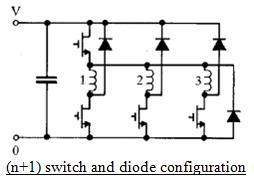
ممکن است این مدار پایه طوری تغییر کند که به اجزای کمتری مورد نیاز باشد،
هرچند که مدار باید همان عملکرد را داشته باشد.
این مدار کارآمد با عنوان پیکربندی سوئیچ (N + 1) و دیود شناخته می شود.
در هر دو پیکربندی، یک خازن برای جلوگیری از نویزهای الکتریکی و صوتی استفاده می شود که نوسانات را در ولتاژ تغذیه محدود می کند.
منبع: http://www.engr.uky.edu/
از فروشگاه ما دیدن فرمایید.
مطالب الکترومارکت را در کانال تلگرام الکترومارکت دنبال کنید.





سلام ببخشید فایل pdf مطالبی را که منتشر کردید را دارید.؟
و همچنین منابع آن ها را؟
با سلام
میخواستم بپرسم اطلاعات مربوط به راه اندازی موتور سوئیچ رلوکتانسی که گذاشتید را دارید.
منظورم در نرم افزار مگنت هست؟
ممنون میشم راهنمایی کنید.
چروژه من مربوط میشه به یک موتور سوئیچ رلوکتانسی. میخواستم ازش ایده بگیرم.
سلام متاسفانه اطالاعات مورد نیاز شما رو ندارم.
سلام
میخواستم بپرسم که شما موتور سوئیچ رلوکتانس هم برای فروش دارید یا خیر؟
سلام نه متاسفانه