کنترل مستقیم گشتاور
یا DTC – پیشرفته ترین فناوری درایو AC است که توسط هر تولیدکننده ای در جهان گسترش یافته است.
هدف این دستورالعمل فنی
هدف این مقاله فنی این است که توضیح دهد DTC چیست؛ چرا و چگونه ایجاد شده است؛
تئوری اصولی پشتوانه ی موفقیت آن چیست؛ ویژگی ها و مزایای این تکنولوژی جدید چیست.
Direct torque control
فصل 1- مقدمه
تیم مهندسی الکترومارکت در نگارش این مطلب تلاش کرده است تا این مقاله در حد امکان کاربردی باشد،
این دستورالعمل به درک اولیه ای از اصول کنترل الکتروموتور AC نیاز دارد.
مخاطب این فناوری تصمیم گیرندگانی شامل طراحان، مهندسان، تصریح کنندگان، مدیران خرید، OEMها و مصرف کنندگان نهایی می باشد؛ درهمه ی بازارها مانند صنعت آب و فاظلاب، مواد شیمیایی، خمیر کاغذ و کاغذ، تولید برق، انتقال مواد، تهویه و سایر صنایع.
در واقع، هر استفاده کننده از درایوهای سرعت متغیر (VSD) و کسی که تمایل دارد از فناوری VSD بهره ببرد، مطالعه ی این دستورالعمل فنی را ضروری می داند.
استفاده از این دستورالعمل
این دستورالعمل طراحی شده است تا یک ساختار منطقی از چرایی و چگونگی توسعه ی DTC فراهم آورد.
خوانندگانی که می خواهند سیر تکامل درایوها از تکنیک های DC اولیه تا AC و از AC تا DCT را بدانند باید برای درک کامل تر این مقاله حتما مقاله فوق مطالعه شود: الگوریتم DTC + نحوه عملکرد اینورتر و همچنین باید از فصل 2 این مقاله مطالعه را شروع کنند.
برای آن خوانندگانی که پاسخ هایی راجع به عملکرد، عملیات و پتانسیل کاربردی DTC می خواهند،



لطفا مستقیما به پرسش و پاسخ فصل 3 این مقاله مراجعه کنند.
فصل 2 – سیر تکامل کنترل مستقیم گشتاور
درایو سرعت متغیر چیست؟
برای فهم پاسخ به این سوال، ما باید درک کنیم که وظیفه ی اصلی درایو سرعت متغیر (VSD)، کنترل شارش انرژی از خطوط اصلی به محلی است که فرآیند مورد نظر در آن انجام می شود.
انرژی از طریق محور الکتروموتور در اختیار فرآیند مورد نظر قرار می گیرد.
دو کمیت فیزیکی وضعیت محور را تعیین می کنند:
- گشتاور و سرعت. برای کنترل شارش انرژی، باید، سر انجام این کمیت ها را کنترل کنیم.
در عمل، یکی از آن دو کمیت کنترل شده است و ما از ” کنترل گشتاور” یا ” کنترل سرعت ” صحبت می کنیم. وقتی VFD در مود کنترل گشتاور عمل می کند، سرعت توسط بار تعیین می شود.
همچنین، وقتی در کنترل سرعت عمل می کند، گشتاور توسط بار تعیین می شود.
در اصل، الکتروموتورهای DC به عنوان VSD ها استفاده شده اند،
زیرا به آسانی بدون نیاز به الکترونیک پیچیده ای، به سرعت و گشتاور مورد نیاز می رسند.
با این وجود، سیرتکامل فناوری درایو سرعت متغیر AC تا حدی با تمایل به تقلید از عملکرد عالی الکتروموتور DC، مانند پاسخ سریع گشتاور و دقت سرعت، به جلو رانده شده است ، این در صورتی است که از الکتروموتورهای AC قوی، ارزان قیمت و بدون نیاز به نگهداری استفاده شود.
خلاصه
در این بخش ما به سیر تکامل DTC نگاه می کنیم،
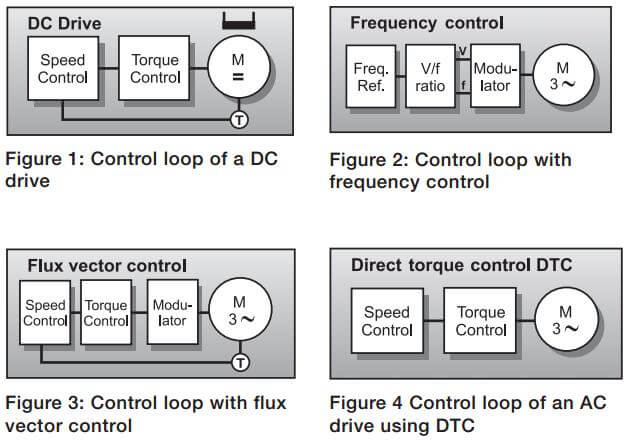
در حالی که 4 درایو برجسته از درایوهای سرعت متغیر را به صورت چارت در آوردیم، یعنی:
- درایوهای الکتروموتور DC
- درایوهای AC، کنترل فرکانس، PWM
- درایوهای AC، کنترل بردار شار، PWM
- درایوهای AC، کنترل مستقیم گشتاور
ما هر کدام از این درایو ها را به نوبت بررسی می کنیم
تا به تصویری کلی برسیم که تفاوت های کلیدی بین هر کدام را مشخص می کند.
درایوهای موتور DC
ویژگی ها
- جهت گیری میدان از طریق کموتاتورمکانیکی
- متغیرهای کنترل، جریان آرمیچر و جریان میدان هستند، که مستقیما از روی الکتروموتور اندازه گیری شده اند
- کنترل گشتاور، مستقیم است
در یک الکتروموتور DC، میدان مغناطیسی توسط جریان عبوری از سیم پیچ تولیدکننده ی میدان در استاتور ایجاد شده است.
این میدان همیشه عمود بر میدان ایجاد شده توسط سیم پیچ آرمیچر است.
این شرایط، با عنوان جهت گیری میدانی، برای تولید حداکثر گشتاور مورد نیاز است.
مجموعه ی کموتاتور- جاروبک که این شرایط را فراهم می کند،
با صرف نظر از موقعیت روتور، نگه داشته شده است.
وقتی جهت گیری میدان بدست آمد،
گشتاور الکتروموتور DC به راحتی با تغییر جریان آرمیچر و با ثابت نگه داشتن جریان مغناطیسی کنترل میشود.
توصیه میشود مطالعه شود: اینورتر DC تمام دیجیتال سانترنو + معرفی ویژه و کاربردی پارامترهای اصلی
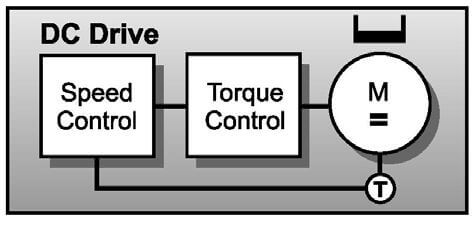
مزیت درایوهای DC این است که گشتاور و سرعت – دو نگرانی اصلی مصرف کننده ی نهایی – به طور مستقیم از طریق جریان آرمیچر کنترل شده اند: به این معنی که گشتاور، حلقه ی کنترل داخلی و سرعت، حلقه ی کنترل خارجی است ( مشاهده ی شکل 1 ).
مزایا
- کنترل گشتاور دقیق و سریع
- پاسخ سرعت بالای دینامیک
- به سادگی قابل کنترل
در اصل، درایوهای DC برای کنترل سرعت متغیر استفاده شده بودند،
زیرا به راحتی می توانند به پاسخ گشتاور و پاسخ سرعتی مناسب و با دقت بالا دست یابند.
یک ماشین AC قادر است گشتاوری را تولید کند که:
- مستقیم است – گشتاور الکتروموتور متناسب با جریان آرمیچر است: گشتاور می تواند بدین گونه به طور مستقیم و به صورت دقیق کنترل شود.
- سریع است – کنترل گشتاور سریع است؛ سیستم درایو می تواند پاسخ سرعتی دینامیک بالایی داشته باشد. گشتاور در صورتی می تواند فوراً تغییر کند که الکترو موتور از منبع جریان ایده آلی تغذیه کرده باشد. یک درایو ولتاژ تغذیه شده هنوز دارای پاسخی سریع است، از این رو سرعت تنها توسط ثابت زمانی الکتریکی روتور (مثلا، اندوکتانس و مقاومت کلی در مدار آرمیچر) تعیین می شود.
- ساده است – جهت گیری میدان با استفاده از یک قطعه ی مکانیکی ساده با نام مجموعه ی کموتاتور- جاروبک، بدست می آید. بنابراین، هیچ نیازی به مجموعه مدارهای کنترل الکترونیکی پیچیده، که ارزش کنترل کننده های الکتروموتور را بالا می برند، وجود ندارد.
معایب
- کاهش اعتبار الکتروموتور
- نیاز به نگهداری منظم
- الکتروموتور گران قیمت
- نیاز به انکودر برای بازخورد
اشکال اصلی این تکنیک، کاهش اعتبار الکتروموتور DC است؛
این واقعیت که جاروبک ها و کموتاتورها از کار می افتند و به سرویس شدن منظم نیاز دارند؛
این که الکتروموتورهای DC می توانند گران قیمت باشند؛
و اینکه به انکودرها برای بازخورد سرعت و مکان نیاز دارند، از اشکالات این تکنیک است.
در صورتی که یک درایو DC، گشتاور به سهولت کنترل شده ای را از صفر تا سرعت پایه و نیز فراتر از آن تولید کند، مکانیک های الکتروموتور پیچیده تر شده و به نگهداری منظم نیاز دارد.
درایوهای AC – مقدمه
AC drives – introduction
- سایز کوچک
- طراحی قوی و قابل اعتماد
- ساده بودن از نظر طراحی
- نیاز اندک به نگهداری
- هزینه ی پایین
سیر تکامل فناوری درایو AC سرعت متغیر تا حدی با تمایل به تقلید از عملکرد درایو DC، مانند پاسخ سریع گشتاور و دقت سرعت به جلو رانده شده است،این در صورتی است که از مزایای الکتروموتورهای AC استاندارد استفاده شود.
درایوهای AC – کنترل فرکانس با استفاده از PWM
AC drives -frequency control using PWM
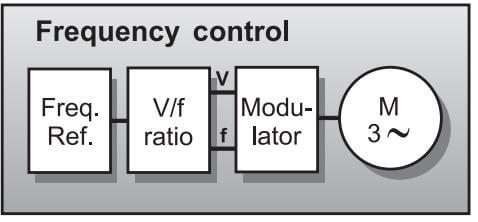
ویژگی ها
- متغیر های کنترل، ولتاژ و فرکانس هستند
- شبیه سازی موج سینوسی AC متغیر با استفاده از مدولاتور
- شار فراهم آمده با نسبت ثابت V/f
- درایو حلقه باز
- بار، سطح گشتاور را معین می کند
برعکس یک درایو DC، تکنیک کنترل فرکانس درایو AC از پارامترهای تولید شده در خارج الکتروموتور به عنوان متغیرهای کنترل، یعنی ولتاژ و فرکانس، استفاده می کند.
هم منبع ولتاژ و هم منبع فرکانس، مدولاتوری را تغذیه می کند که موج سینوسی AC را شبیه سازی می کند و آن را به سیم پیچ های استاتور در الکتروموتور اعمال می کند.
به این تکنیک، مدولاسیون پهنای پالس (PWM) گفته می شود
و از این واقعیت بهره می برد که یک یکسوکننده ی دیود، نسبت به خطوط اصلی وجود دارد
و ولتاژ متوسط DC ثابت نگه داشته شده است.
اینورتر، الکتروموتور را در فرم یک رشته پالس PWM تحمیل کننده ی ولتاژ و فرکانس، کنترل می کند.
به طور قابل توجهی، در این روش از فیدبک یا دستگاه بازخورد استفاده نمی شود،
دستگاهی که اندازه ی سرعت و مکان را از روی محور الکتروموتور بدست می آورد
و آن ها را به درون حلقه ی کنترل فیدبک می دهد.
چنین آرایشی، بدون یک دستگاه بازخورد، یک ” درایو حلقه باز ” (OPEN LOOP) گفته می شود.
مزایا
- هزینه ی پایین
- بدون نیاز به فیدبک یا انکودر دستگاه بازخورد – ساده
چون هیچ فیدبک و دستگاه بازخوردی وجود ندارد، قاعده ی اصلی کنترل، هزینه ی پایین و راه حل های ساده ای را برای الکتروموتورهای القایی AC کنترلی به صرفه، پیشنهاد می دهد.
این نوع درایو برای کاربردهایی مناسب است که به سطوح بالای دقت و صحت نیاز ندارند، مثل پمپ ها و فن ها.
معایب
- عدم استفاده از جهت گیری میدان
- چشم پوشی از وضعیت الکتروموتور
- گشتاور کنترل نشده است
- استفاده از مدولاتورتأخیری
در این تکنیک، که گاهی به آن کنترل اسکالر (scalar) گفته می شود، جهت گیری میدان در الکتروموتور مورد استفاده قرار نگرفته است.
در عوض، فرکانس و ولتاژ، متغیرهای کنترل اصلی هستند و در سیم پیچ های استاتور به کار رفته اند.
از وضعیت روتور چشم پوشی شده است، به این معنی که هیچ سیگنال سرعت یا موقعیتی، بازخورد نیافته است.
بنابراین، گشتاور نمی تواند با درجه ای از دقت کنترل شده باشد.
علاوه بر این، این تکنیک از مدولاتوری استفاده می کند
که اساساً ارتباط بین سیگنال های ولتاژ و فرکانس ورودی و نیاز الکتروموتور به پاسخ به این تغییرات سیگنال را کاهش می دهد.
درایوهای AC – کنترل بردار شار با استفاده از PWM
AC drives – flux vector control using PWM
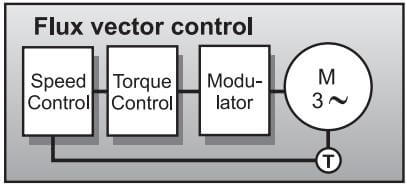
ویژگی ها
- کنترل میدان جهت یافته – شبیه سازی درایو DC
- مشخصه های الکتریکی الکتروموتور شبیه سازی شده است – ” مدل الکتروموتور “
- درایو حلقه بسته (CLOSE LOOP VFD)
- گشتاور، به صورت غیرمستقیم کنترل شده است
برای رقابت با شرایط عملکرد مغناطیسی یک الکتروموتور DC، مثلا، برای انجام فرآیند جهت گیری میدان، درایو وکتور شار نیاز دارد که مکان زاویه ای فضایی شار روتور را در درون الکتروموتور القایی AC بداند.
در درایوهای PWM وکتور شار، به جای اینکه جهت گیری میدان از روی مجموعه ی کموتاتور/ جاروبک مکانیکی در الکتروموتور DC بدست آید، بوسیله ی میانگین های الکترونیکی بدست آمده است.
اولا، اطلاعات در مورد وضعیت روتوربوسیله ی بازخورد سرعت روتور و موقعیت زاویه ای نسبت به میدان استاتور بوسیله ی یک انکودر پالس بدست آمده است.
به درایوی که از انکودر سرعت استفاده می کند، ” درایو حلقه بسته ” (CLOSE LOOP VFD) گفته می شود.
همچنین مشخصه های الکتریکی الکتروموتور از نظر ریاضی با ریزپردازنده های مورد استفاده برای پردازش اطلاعات، مدل سازی شده است.
کنترل کننده ی الکترونیکی (CPU) یک درایو با کنترل وکتور شار، کمیت های الکتریکی مانند ولتاژ، جریان و فرکانس را که متغیرهای کنترل هستند، ایجاد می کند و این ها را از طریق یک مدولاتور، روی الکتروموتور القایی AC اعمال می کند.
گشتاور، علاوه بر این، به صورت غیرمستقیم نیز کنترل شده است.
مزایا
- پاسخ مناسب گشتاور
- کنترل سرعت دقیق
- گشتاور کامل در سرعت صفر
- عملکردی نزدیک به درایو DC
کنترل وکتور شار به گشتاور کامل در سرعت صفر می رسد که عملکرد آن را بسیار به عملکرد درایو DC نزدیک می کند.
معایب
- بازخورد مورد نیاز است
- هزینه بر بودن
- نیاز به مدولاتور
برای دست یابی به سطح پاسخ گشتاور بالا و دقت بالای سرعت، یک دستگاه فیدبک مورد نیاز است.
تهیه ی دستگاه بازخورد (انکودر) می تواند هزینه بر باشد و باعث پیچدگی مکانیکی و تراشکاری روی موتور القایی AC ساده ی سنتی شود.
همچنین، از مدولاتوری استفاده شده است که ارتباط بین سیگنال های ولتاژ و فرکانس ورودی و نیاز الکتروموتور به پاسخ به این تغییرات سیگنال را کاهش می دهد.
با وجود اینکه الکتروموتور از نظر مکانیکی ساده است، درایو از نظر الکتریکی پیچیده است.
درایوهای AC – کنترل مستقیم گشتاور
AC drives – direct torque control
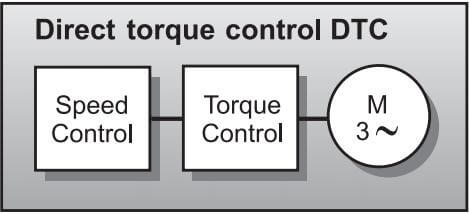
متغیرهای کنترل
در فناوری انقلابی DTC توسعه ایجاد شده توسط شرکت های پیشرفته تولید اینورتر، جهت گیری میدانی، بدون استفاده از بازخوردی بدست می آید که از تئوری پیشرفته ی الکتروموتور برای محاسبه ی مستقیم گشتاور الکتروموتور استفاده می کند و نیز بدون استفاده از مدولاسیون، بدست می آید.
متغیرهای کنترل، شار مغناطیسی الکتروموتور و گشتاور الکتروموتور می باشند.
در DTC هیچ مدولاتوری وجود ندارد و هیچ نیازی به دورسنج یا اندکودر موقعیت برای بازخورد سرعت و مکان محور الکتروموتور نیست.
DTC از سریع ترین نرم افزار پردازش سیگنال دیجیتال در دسترس و فهم ریاضی پیشرفته در چگونگی کارکرد موتور استفاده می کند.
حاصل، درایوی با پاسخ گشتاوری است که معمولا 10 مرتبه سریع تر از هر درایو AC یا DC است.
دقت سرعت دینامیک در درایو های DTC 8 مرتبه بیشتر از هر درایو AC حلقه باز خواهد بود و با یک درایو DC که از فیدبک استفاده می کند، قابل مقایسه خواهد بود.
DTC اولین درایو ” جهانی ” را با قابلیت انجام کار هر دو درایو AC و DC تولید کرده است.
بخش های باقی مانده در این دستورالعمل، ویژگی ها و مزایای DTC را برجسته می کنند.
مقایسه ی درایوهای سرعت متغیر
اجازه دهید اکنون نگاه اندک متفاوتی به هر یک از این بلوک ها و نقاط کنترل بیاندازیم.
نظر اول، شباهت بین بلوک کنترل درایو DC ( شکل 1 ) و بلوک کنترل DTC ( شکل 4 ) است.
هر دو از پارامترهای الکتروموتور برای کنترل مستقیم گشتاور استفاده می کنند.
ولی DTC بدون استفاده از دستگاه فیدبک ،مزایای دیگری دارد؛ همه ی مزایای الکتروموتور AC ( مشاهده ی شکل 10 ) را دارد؛ و هیچ تحریک خارجی مورد نیاز نیست.
جدول 1: مقایسه ی متغیرهای کنترل
| درایو | متغیرهای کنترل |
| درایوهای DC | جریان آرمیچر، IA جریان مغناطیسی ، IM |
| درایو های (PWM) | ولتاژ خروجی، U فرکانس خروجی، f |
| کنترل مستقیم گشتاور | گشتاور الکتروموتو، T شار مغناطیسی الکتروموتور، ψ |
همانطور که می توان در جدول 1 دید، هم درایوهای DC و هم درایوهای DTC از پارامترهای حقیقی الکتروموتور برای کنترل گشتاور و سرعت استفاده می کنند.
بنابراین، عملکرد دینامیک، سریع و آسان است.
همچنین در DTC، برای اکثر کاربردها، هیچ تاکومتر یا انکودری برای بازخورد سیگنال سرعت یا مکان موردنیاز نیست.
مقایسه ی DTC ( شکل 4 ) با دو بلوک کنترل درایو AC دیگر ( شکل 2 و3 )، تفاوت های بسیاری را نشان می دهد، یکی از این تفاوت های اصلی این است که هیج مدولاتوری با DTC مورد نیاز نیست.
در درایوهای PWM AC، متغیرهای کنترل، فرکانس و ولتاژی هستند که نیاز است مراحل متعددی را قبل از اعمال به روی الکتروموتور بگذرانند.
بنابراین، در درایوهای PWM، کنترل در درون کنترل کننده ی الکترونیکی استفاده شده است، نه درون الکتروموتور.
فصل 3 – سوال های رایج
کنترل مستقیم چیست ؟
کنترل مستقیم گشتاور – یا همان DTC – قدیم ترین فناوری درایو AC ایجاد شده توسط شرکت های پیشرفته تولید اینورتر مثل: control techniques , ABB , SANTERNO ,VACON است و آماده شده است تا در آینده ی نزدیک جایگزین درایوهای سنتی PWM از نوع حلقه باز یا حلقه بسته شود.
چرا به آن کنترل مستقیم گشتاور گفته شده است ؟
کنترل مستقیم گشتاور روشی را توضیح می دهد که در آن کنترل گشتاور و سرعت به طور مستقیم بر مبنای حالت الکترومغناطیس الکتروموتوری قرار دارد که مشابه یک الکتروموتور DC است، ولی برعکس روشی است که درآن درایوهای سنتی PWM از فرکانس و ولتاژ ورودی استفاده می کنند.
DTC اولین فناوری برای کنترل ” واقعی ” متغیرهای کنترل در الکتروموتور، یعنی گشتاور و شار، است.
مزیت آن DTC چیست ؟
چون گشتاور و شار، پارامترهای الکتروموتوری هستند که به صورت مستقیم کنترل می شوند، هیچ نیازی به مدولاتور، مانند آنچه در درایوهای PWM برای کنترل فرکانس و ولتاژ استفاده می شود، نیست.
این، از نظر عملی، واسطه را جدا می کند و به صورت چشمگیری سرعت پاسخ گویی درایو به تغییرات در گشتاور مورد نیاز را بالا می برد.
DTC کنترل دقیق گشتاور را نیز بدون نیاز به یک دستگاه بازخورد فراهم می آورد.
چرا نیاز به فناوری درایو AC دیگری وجود دارد؟
DTC چیزی جز فناوری درایو AC نیست.
تقاضای صنعتی بالاست و فناوری درایو موجود نمی تواند پاسخگوی این تقاضاها باشد.
برای مثال، آنچه صنعت می خواهد:
- کیفیت بهتر محصول که می تواند تا حدی با بهبود دقت سرعت و کنترل سریع تر گشتاور بدست آید.
- زمان از کار افتادگی کمتر که باعث می شود یک درایو به صورت غیرضروری قطع نشود؛ درایوی که با دستگاه گران قیمت بازخورد پیچیده نشده باشد؛ و درایوی که به شدت تحت تاثیر تداخلاتی مانند هارمونیک و RFI نباشد.
- محصولات کمتر. یک درایو قادر به پاسخ گویی به تمام نیازهای کاربردی است، خواه AC، DC یا servo ( فرمان یار ). این درایو ” جهانی ” واقعی است.
- یک محیط کار راحت با درایوی که نویزهای قابل شنیدن بسیار کمتری تولید می کند.
این ها تنها برخی تقاضاهای صنعت هستند. DTC می تواند راه حل هایی برای این درخواست ها ارائه دهد و همچنین مزایای جدیدی در بسیاری از کاربردهای استاندارد فراهم آورد.
چه کسی DTC را اختراع کرد ؟
ABB تحقیقاتی در مورد DTC، پس از 1988، به دنبال انتشار تئوری ای در 1971 و 1985 توسط دکتر Blaschke آلمانی و همکارش Depenbrock، انجام داده است.
DTC بر تئوری کنترل جهت یافته ی میدان در ماشین های القایی و تئوری خود کنترلی مستقیم تکیه دارد.
ABB از بیش از 100 نفر در سال برای ایجاد این فناوری استفاده کرد.
عملکرد
مزایای اصلی فناوری DTC نسبت به فناوری درایو سنتی AC چیست ؟
فناوری DTC مزایای بسیاری دارد. ولی به صورت قابل توجه تر، درایوهایی که از فناوری DTC استفاده می کنند، ویژگی های عملکردی دینامیک استثنایی زیر را دارند، ویژگی هایی که بسیاری از آن ها بدون نیاز به یک انکودر یا تاکومتر برای نظارت بر مکان یا سرعت محور بدست آمده اند، این ویژگی ها عبارتند از:
- پاسخ گشتاور: – وقتی یک گام مرجع گشتاور 100 درصدی اسمی به کار رفته است، خروجی درایو چقدر سریع می تواند به مقدار خاصی برسد.
برای DTC، یک پاسخ گشتاور نمونه، 1 تا 2 میلی ثانیه زیر 40 هرتز است، در مقایسه با 10 تا 20 میلی ثانیه برای وکتور شار و درایوهای DC مجهز شده به یک انکودر.
در درایوهای PWM حلقه باز ( مشاهده ی شکل 11)، زمان پاسخ معمولا در 100 میلی ثانیه، بسیار خوب است.
در واقع، با پاسخ گشتاور آن، DTC به حد طبیعی میرسد. با در دسترس بودن ولتاژ و جریان، زمان پاسخ نمی تواند بیش از این کوتاه شود. حتی در درایوهای ” بدون حسگر “، پاسخ گشتاور، صدهای میلی ثانیه است.
- کنترل دقیق گشتاور در فرکانس های پایین، همچنین گشتاور بار کامل در سرعت صفر بدون نیاز به دستگاه بازخورد مانند یک انکودر یا تاکومتر. در DTC، سرعت می تواند در فرکانس های زیر 0.5 هرتز کنترل شود و باز هم گشتاور 100 درصدی را از طریق سرعت صفر فراهم آورد.
- قابلیت تکرار گشتاور: – درایو، گشتاور خروجی خود را با همان فرمان مرجع گشتاور با چه کیفیتی تکرار می کند. DTC، بدون یک انکودر، می تواند قابلیت تکرار 1 تا 2 درصدی گشتاوری از گشتاورهای اسمی را در سرتاسر دامنه ی سرعت فراهم آورد. این قابلیت، نصف قابلیت مربوط به درایوهای AC حلقه باز است و برابر با درایوهای AC و DC حلقه بسته است.
دقت سرعت استاتیک الکتروموتور: – خطای بین مرجع سرعت و مقدار واقعی در بار ثابت.
برای DTC، دقت سرعت 10 درصد لغزش الکتروموتور است، که در یک موتور 11 کیلوولتی، 0.3 درصد دقت سرعت استاتیک است. در یک موتور 110 کیلوواتی، دقت سرعت 0.1 درصد حالت بدون انکودر ( حلقه باز ) است.
این امر، دقت موردنیاز یا 95 درصد کاربردهای درایوهای صنعتی را فراهم می آورد.
با این وجود، برای رسیدن به همان دقتی که درایوهای DC دارند، یک انکودر مورد نیاز است.
در مقابل، در درایوهای PWM کنترل شده ی فرکانسی، دقت سرعت استاتیک معمولا بین 1 تا3 درصد است.
بنابراین پتانسیل بهبود فرآیند و ضوابط به صورت قابل ملاحظه ای در درایوهای استانداردی که از تکنولوژی DTC استفاده می کنند، بالاتر است.
یک درایو DC که از یک انکودر با نسبت پالس / دور 1024 استفاده می کند، می تواند به دقت سرعتی برابر با 0.01 درصد برسد.
- دقت سرعت دینامیک: – جدایی ناپذیری زمان از اختلاف سرعت، وقتی سرعت اسمی گشتاور ( 100 درصد) به کار رفته است. دقت سرعت دینامیک در DTC حلقه باز بین 0.3 تا 0.4 درصد ثانیه است. این امر به تعدیل سود کنترل کننده ای بستگی دارد، که می تواند با آنچه موردنیاز فرآیند است، سازگاری یابد.
در درایوهای AC حلقه باز دیگر، دقت دینامیک، 8 مرتبه کمتر است و مراحل عملی حدود 3 درصدم ثانیه است. اگر ما کنترل کننده ی DTC را به یک انکودر مجهز کنیم، دقت سرعت دینامیک، 0.1 درصد ثانیه خواهد بود، که این مقدار باعملکرد درایو فرمان یار را مطابقت دارد.
مزایای مربوط به کاربرد این شکل های عملکردی کدامند ؟
- پاسخ سریع گشتاور: – این به صورت قابل ملاحظه ای زمان افت سرعت را در مدت انتقال بار کاهش می دهد، در حالی که کنترل فرآیند بسیار توسعه یافته تر و کیفیت محصول سازگارتری را به همراه می آورد.
- کنترل گشتاور در فرکانس های پایین: – این به صورت خاص برای بالابرها یا آسانسورها مفید است، جایی که نیاز است بار به طور منظم و بدون هیچ گونه پرتابی، شروع به حرکت کرده و متوقف شود.
همچنین با حضور یک پیچنده، کنترل تنش می تواند از سرعت صفر تا ماکزیمم بدست آید.
در مقایسه با درایوهای وکتور شار PWM، DTC مزیت صرفه جویی در هزینه را به همراه می آورد چون به هیچ تاکومتری نیاز ندارد.
- خطی بودن گشتاور: – این مورد در کابردهای دقیق مانند پیچنده های مورد استفاده در صنعت کاغذ، جایی که سطح دقیق و ثابت سیم پیچ خطرناک است، مهم است.
دقت سرعت دینامیک: – بعد از یک تغییر ناگهانی در بار، الکتروموتور می تواند به یک وضعیت ثابت فوق العاده سریع برسد.
جدول 2: ویژگی های عملکرد دینامیک و مزایای فراهم آمده بوسیله ی فناوری DTC
| ویژگی | نتیجه | مزیت |
| دقت سرعت الکتروموتور مناسب بدون وجود تاکومتر.(فیدبک) | اجازه داده می شود تا سرعت بهتر از حالت 0.5 درصدی دقت، کنترل شود. به هیچ تاکومتری در 95% کاربردها نیاز نیست. | صرفه جویی در هزینه های که به سرمایه گذاری نیاز دارند. افزایش اعتبار. کنترل بهتر فرآیندها. کیفیت بالاتر محصول. هدایت به سمت یک درایو جهانی واقعی. |
| کنترل عالی گشتاور بدون وجود تاکومتر. | درایو برای موارد کابردی تقاضا شده. مجاز بودن گشتاور مورد نیاز در همه ی زمان ها. قابلیت تکرار 1 درصدی گشتاور. زمان پاسخ گشتاور کمتر از 5 میلی ثانیه | عملکرد مشابه با DC ولی بدون تاکومتر. کاهش نقص های مکانیکی در ماشین آلات. سرمایه گذاری کمتر. |
| گشتاور کامل در سرعت صفر با یا بدون وجود تاکومتر/انکودر. | بدون هیچ گونه نیاز به ترمز مکانیکی. انتقال آرام بین درایو و ترمز. اجازه داده شده است تا درایو در استفاده از درایو DC سنتی مورد استفاده قرار بگیرد. | صرفه جویی در هزینه های که به سرمایه گذاری نیاز دارند. کنترل بهتر بار. قابلیت استفاده از درایو AC و الکتروموتور به جای DC. الکتروموتور AC استاندارد با هدف نگهداری کمتر و هزینه پایین تر. |
| پایین آوردن سرعت و مکان با انکودر به منظور کنترل | عملکرد درایو فرمان یار | درایو گشتاور با عملکرد بالا و مقرون به صرفه؛ کنترل مکان و دقت استاتیک بهتری را فراهم می آورد. کنترل الکتروموتور AC استاندارد با دقت بالا |
جدای از شکل های عملکرد عالی دینامیک، فناوری درایو DTC هیچ مزیتی دارد؟
بله، مزیت های بسیاری وجود دارد. برای مثال، درایوهای DTC به تاکومتر و انکودر برای نظارت بر سرعت یا مکان محور الکتروموتور، به منظور دست یابی به سریع ترین پاسخ گشتاور که همواره از سوی درایو AC ایجاد می شود، نیاز ندارند. این امر، در هزینه ی اولیه صرفه جویی می کند.
جدول 3: ویژگی ها و مزایای یوزر، ارائه شده توسط فناوری DTC
| ویژگی ها | نتایج | مزایا |
| کنترل سریع ولتاژ لینک DC. | اتلاف توان ride through. | درایو قطع نخواهد شد. زمان قطعی کمتر است. از وقفه در طول فرآیند پرهیز شده است. در طول فرآیندهای پیوسته، اتلاف کمتر است. |
| استارت اتوماتیک (ری استارت مستقیم ). |
استارت با حضور اندوکتانس پسماند الکتروموتور. بدون نیاز به تاخیر در ری استارت. | می تواند در الکترموتوری استفاده شود که بدون منتظر ماندن برای افت شار عمل می کند. می تواند الکتروموتور را از خط به درایو انتقال دهد. ریاستارت وجود ندارد. هیچ وقفه ای در فرآیند وجود ندارد. |
| استارت اتوماتیک ( استارت فلایینگ ). | هماهنگی با الکتروموتور دوار. | هیچ وقفه ای در فرآیند وجود ندارد. دستگاه بدون اشکال کنترل می شود. کنترل در تمام شرایط ادامه می یابد. |
| ترمز شار | ترمز کنترل شده بین دو نقطه سرعت. | صرفه جویی در هزینه های که به سرمایه گذاری نیاز دارند. هیچ تاخیری مانند آن چه در ترمز DC لازم بود، مورد نیاز نیست. می تواند برای برای کاهش سرعت تا سرعتی نابرابر با صفر مورد استفاده قرار بگیرد. به برشگر و مقاومت ترمز کمتر نیاز می شود. |
| بهینه سازی شار | اتلاف های الکتروموتور به حداقل رسیده است. نویز الکتروموتور کمتر است. | الکتروموتور کنترل شده |
| خودشناسی / میزان سازی درونی | میزان سازی الکتروموتور نسبت به درایو برای عملکردهای بالا | برپایی راحت و دقیق. بدون نیاز به میزان سازی پارامتر. زمان راه اندازی کمتر است. گشتاور آغازی گارانتی شده است. به آسانی برای هر سیستم AC بروزرسانی می شود. |
| بدون الگوی از قبل تعیین شده سوویچینگ دستگاه های برق. | نویز کم است. حامل ثابت شده ای وجود ندارد، بنابراین نویز آکوستیک، به سبب طیف نویز ” سفید ” قابل قبول است. | صرفه جویی در هزینه های مربوط موانع آکوستیک در موارد کاربردی حساس به نویز. رزونانس های مکانیکی آسیب زننده ای وجود ندارد. تنش ها در جعبه دنده ها، فن ها، پمپ ها پایین تر است. |
| بدون محدودیت در شتاب | می تواند در سریع ترین | فرآیند بهتر کنترل می شود. |
| ماکزیمم و میزان شتاب. | زمان ممکن بدون فشار مکانیکی سرعت را زیاد و کم کند. |
استارت سریع در همه ی حالات الکترومغناطیسی و مکانیکی الکتروموتور نیز از ویژگی های درایو DC است.
توصیه میشود مطالعه شود: اینورتر DC تمام دیجیتال سانترنو + معرفی ویژه و کاربردی پارامترهای اصلی
الکتروموتور می تواند بلافاصله بدون هیچ تاخیری شروع به کار کند.
واضح است که درایوهای DC پر مزیت ترین درایوها برای عملکرد بالا یا کاربردهایی هستند که از درایو انتظار می رود.
DTC چه مزیت هایی را برای درایوهای استاندارد به همراه می آورد؟
کاربردهای استاندارد برای 70 درصد از همه ی درایوهای سرعت متغیر نصب شده در کل صنعت گزارش شده اند.
دو کابرد رایج در فن ها و پمپ ها در صنایعی مانند گرمایش، تهویه (HVAC)، آب و غذا و آشامیدنی ها می باشد.
در این کاربردها، DTC راه حل هایی برای مشکلاتی مانند هارمونیک و نویز فراهم می آورد.
برای مثال، فناوری DTC می تواند واحد تولید خط ورودی درایو را کنترل کند، جایی که پل دیود متعارف جایگزین پل کنترل، شده است.
این به آن معناست که هارمونیک می تواند به طور قابل ملاحظه ای با پل ورودی کنترل شده ی DTC کاهش یابد.
اغتشاش سطح پایین جریان با یک پل کنترل شده ی DC کمتر از یک آرایه ی 6 پالسی یا 12 پالسی متعارف خواهد بود و فاکتور توان می تواند به بزرگی 0.99 باشد.
برای کاربردهای استاندارد، درایوهای DTC، گشتاورهای عظیم و ناگهانی بار را که منجر به تغییر سریع در فرآیند می شوند، بدون هرگونه قطعی ناشی از اضافه ولتاژ یا اضافه جریان، تحمل می کنند.
همچنین، اگر برای زمان کوتاهی، اتلافی در توان ورودی وجود داشته باشد، درایو باید تحریک شده باقی بماند.
ولتاژ لینک DC نباید از پایین ترین سطح کنترل 80 درصدی کمتر شود.
برای تضمین این موضوع، DTC دارای یک سیکل کنترل 25 میکروثانیه ای است.
DTC چه اثری بر روی کنترل پمپ می گذارد؟
DTC بر روی همه ی انواع پمپ ها اثر می گذارد.
چون DTC به سمت درایو جهانی هدایت می شود، همه ی پمپ ها، صرف نظر از اینکه از نوعی باشند که گشتاور گریزنده از مرکز دارد یا گشتاور ثابت ( پمپ های پیچی)، می توانند با پیکربندی یک درایو، کنترل شده باشند؛ این موضوع در دستگاه های بخور و بالابرها نیز صادق است. فناوری DTC به درایو اجازه می دهد تا خود را با نیازهای کاربردی مختلف، تطابق دهد.
توصیه میشود مطالعه شود: افزایش راندمان و 11 روش کاهش مصرف انرژی در ایستگاه های پمپاژ
برای مثال، در پمپ های پیچی، درایوی که از فناوری DTC استفاده می کند، قادر به تطابق خود با گشتاور شروعی خواهد بود که برای یک شروع تضمینی کافی است.
Ride through اتلاف توان، میزان دسترسی به پمپاژ در مدت وقفه های کوتاهمدت برقی را بهبود خواهد بخشید.
امکان ذاتی کنترل گشتاور در فناوری DTC، محدودیت گشتاور را به منظور پرهیز از تنش مکانیکی بر روی پمپ ها و لوله کشی ها مجاز می کند.
فناوری DTC چه اثری بر روی ذخیره ی انرژی می گذارد؟
یک ویژگی DTC که در بازدهی انرژی مشارکت دارد، توسعه ای با نام بهینه سازی شار الکتروموتور است.
با این ویژگی، کارایی کل درایو (یعنی کنترل کننده و الکتروموتور) در موارد کاربردی مربوط به فن و پمپ، بسیار بهبود یافته است.
برای مثال، برای 25 درصد بار، تا 10 درصد بهبود بازده انرژی کل وجود دارد.
این به طور مستقیم بر روی هزینه های عملیاتی اثر می گذارد.
این ویژگی همچنین به صورت قابل ملاحظه ای، نویز الکتروموتور را در مقایسه با نویز تولید شده توسط فرکانس سوویچینگ یک درایو PWM سنتی، کاهش می دهد.
آیا فناوری DTC در بسیاری از تأسیسات استفاده شده است؟
بله، صدها تاسیسات از میان هزاران تاسیسات از این فناوری استفاده می کنند. یکی از بزرگ ترین تولیدکنندگان جهانی دستگاه وب، فناوری DTC را بر روی یک پیچه در فرآیند اتمام فیلم تست کرد.
تقاضا:
کنترل دقیق گشتاور در پیجه به منظور تولید رول های فیلم با کیفیت بالا.
راه حل:
درایوهای DTC حلقه باز، جایگزین درایوهای DC سنتی شده اند و وکتور شار دومی، درایوهای AC را بر روی درایوهای متمرکز در محل بازپیچی، کنترل کرده است.
مزایا:
ساخت محل پیچه ساده شد و اعتبار افزایش یافت.
هزینه ی یک تاکومتر و سیم کشی مربوط به آن برابر با این هزینه ها برای الکتروموتور 30 کیلوواتی است. این باعث صرفه جویی قابل توجه در هزینه هایی می شود که نیاز به سرمایه گذاری دارند.
آیا تفاوتی بین روش های DTC و PWM سنتی وجود دارد؟
- PWM کنترل فرکانس و PWM وکتور شار
درایوهای PWM سنتی از ولتاژ خروجی و فرکانس خروجی به عنوان متغیرهای کنترل اصلی استفاده می کنند ولی لازم است پهنای پالس این متغیرها پیش از به کار رفتن در الکتروموتور، مدوله شده باشد.
این مرحله ی مدولاتور به زمان پردازش سیگنال افزوده می شود و بنابراین، سطح پاسخ گشتاور و سرعت از سوی درایو PWM را محدود می کند.
معمولا، یک مدولاتور PWM ده برابر DTC زمان لازم دارد تا به تغییر حقیقی پاسخ دهد.
- کنترل DTC
DTC اجازه می دهد تا گشتاور موتور و شار استاتور به عنوان متغیرهای کنترل اصلی استفاده شوند. هر دوی این متغیرها مستقیما از روی خود الکتروموتور بدست می آیند.
بنابراین، در DTC، هیچ نیازی به ولتاژ و فرکانس مجزای کنترل کننده ی مدولاتور PWM وجود ندارد.
یک مزیت بزرگ دیگر درایو DTC این است که هیچ دستگاه بازخوردی برای 95 درصد تمام موارد استفاده از درایو، لازم نیست.
چرا DTC به یک تاکومتر یا انکودر مکان نیاز ندارد تا به دقت تشخیص دهد که در همه ی زمان ها محور الکتروموتور کجاست؟
4 دلیل اصلی برای این موضوع وجود دارد:
- دقت مدل الکتروموتور ( مشاهده ی شکل 29).
- متغیرهای کنترل به طور مستقیم از روی الکتروموتور بدست آمده اند ( مشاهده ی شکل 29).
- سرعت های بالای پردازش DSP و نرم افزار سلکتور پالس مناسب ( مشاهده ی شکل 30 ).
- به هیچ مدولاتوی نیاز نیست (مشاهده ی شکل 14).
در ترکیب با فرم یک درایو DTC، ویژگی های بالا، درایوی را ایجاد می کنند که قادر به محاسبه ی40,000 باره ی ولتاژهای ایده آل سوویچینگ در هر ثانیه هستند.
این به اندازه ی کافی برای کنترل پالس های سوویچینگ منفرد سریع است. به بیان ساده تر، این سریع ترین حالتی است که تا حالا بدست آمده است.
یک بار در 25 میکروثانیه، نیمه رساناهای اینورتر با الگوی مناسب سوویچینگ، تغذیه شده اند تا گشتاور مورد نیاز را تولید کنند. این میزان به روز رسانی در واقع کمتر از هر ثابت زمانی در الکتروموتور است.
بنابراین، الکتروموتور اکنون جزء محدودکننده است نه اینورتر.
تفاوت بین DTC و سایر درایوهای بدون سنسور در بازار چیست؟
تفاوت های وسیعی بین DTC و بسیاری از درایوهای بدون سنسور وجود دارد.
ولی تفاوت اصلی این است که DTC کنترل دقیقی را حتی در سرعت های پایین و زیر سرعت صفر، بدون بازخورد انکودر فراهم می آورد.
در فرکانس های پایین، گام گشتاور اسمی می تواند در کمتر از 1 میلی ثانیه افزایش یابد. این امر به بهترین شکل ممکن در دسترس است.
چگونه درایو DTC به عملکرد بالای یک درایو سروُ دست می یابد؟
به زبان ساده چون الکتروموتور اکنون تعیین کننده ی حدود عملکردی است، نه خود درایو.
دقت سرعت دینامیک نمونه برای یک درایو فرمان یار، 0.1%s است.
یک درایو DTC می تواند به این دقت دینامیک با بازخورد سرعت اختیاری از سوی یک تاکومتر دست یابد.
چگونه DTC به این پیشرفت های اساسی در فناوری سنتی دست یافت؟
قابل توجه ترین تفاوت، سرعت مطلقی است که DTC با آن عمل می کند. همانظور که در بالا گفته شد، پاسخ گشتاور، سریع تر ازسایرین قابل دسترسی است.
برای دست یابی به یک حلقه ی گشتاور سریع، ABB به آخرین فناوری پردازش سیگنال سرعت بالا مجهز شده است و 100 نفر را در هر سال به کار می گیرد تا مدل الکتروموتور بسیار پیشرفته ای را توسعه دهد که به دقت پارامترهای حقیقی الکتروموتور را در داخل کنترل کننده شبیه سازی می کند.
برای فهم دقیق تر تئوری کنترل DTC، به شکل 28 مراجعه کنید.
آیا یک درایو DTC از منطق فازی (نادقیق) در داخل حلقه ی کنترل خود استفاده می کند؟
خیر. منطق فازی در برخی درایوها استفاده شده است تا جریان شتاب را در داخل حدود جریانی نگه دارد و نیجتاً از قطعی غیرضروری درایو جلوگیری کند.
وقتی DTC به طور مستقیم در حال کنترل گشتاور است، جریان می تواند مطابق این محدوده در همه ی شرایط عملکردی نگه داشته شود.
وقتی درایوی از فناوری DTC استفاده می کند، در اصطلاح می گویند بدون قطعی است ( قطعی در آن دیده نمی شود ).
چگونه به این ویژگی دست یافته است؟
بسیاری از تولیدکنندگان سال ها تلاش کردند تا از قطعی ها در مدت افزایش و کاهش سرعت جلوگیری کنند و فهمیدند که این کار فوق العاده دشوار است.
DTC بوسیله ی گشتاور حقیقی الکترومتور به عملکرد بدون قطعی دست می یابد.
سرعت و دقت درایوی که به پارامترهای کنترلی محاسبه شده به جای اندازه گیری شده نیاز دارد، هیچ وقت نمی تواند واقع گرایانه باشد. شما تصویر کاملی دریافت نمی کنید، مگراینکه در حال نگاه کردن به محور باشید.
آیا این برای DTC صادق است؟
DTC تصویر کامل را می شناسد.
همانطور که در بالا توضیح داده شد، در سایه ی تکامل مدل الکتروموتور و قابلیت انجام 40,000 محاسبه در هر ثانیه، یک درایو DTC به صراحت می داند که محور الکتروموتور درحال چه کاری است.
هرگز هیچ شکی در مورد وضعیت الکتروموتور وجود ندارد.
این در پاسخ بالا و استثنایی گشتاور و دقت سرعت نشان داده شده در شکل های در صفحات 18 و 19 انعکاس یافته است.
برخلاف درایوهای AC سنتی، جایی که تا 30 درصد همه ی راه گزینی ها به هدر رفته اند،
درایوی که از فناوری DTC استفاده می کند دقیقا می داند که محور کجاست .
بنابراین هیچ یک از راه گزینی های خود را تلف نمی کند.
DTC می تواند 95 درصد همه ی کاربردهای صنعتی را پوشش دهد.
موارد استثنا، به طور عمده کاربردهایی که در آن ها کنترل سرعت بسیار دقیقی مورد نیاز است،
با افزودن دستگاه بازخورد به منظور فراهم آوردن کنترل حلقه بسته، برای مصارف خاص خود تهیه خواهند شد.
این دستگاه، با این وجود، می تواند از سنسورهای موردنیاز برای درایو های حلقه بسته ی متعارف ساده تر باشد.
حتی با وجود سریع ترین نیمه رساناها، اتلاف های زمانی نیز تعریف شده است.
بنابراین، میزان سازی اتوماتیک یک درایو DTC چقدر دقیق است؟
میزان سازی اتوماتیک در تشخیص اولیه ی راه اندازی یک درایو DTC استفاده شده است ( مشاهده ی شکل 29).
وقت تلف شده اندازه گرفته شده است و با مدل الکتروموتوری در ….. is taken into account by motor model when calculating the actual flux.اگر با درایو PWM مقایسه کنیم، مشکل با PWM در محدوده ی 20 تا30 هرتز است که باعث شکن گشتاور می شود.
درایو DTC چه نوع پایداری را در بارهای سبک و سرعت پایین خواهد داشت؟
کاهش پایداری تا سرعت صفر خوب است و هم دقت گشتاور و هم دقت سرعت می تواند در سرعت های بسیار پایین و بارهای سبک حفظ شود. ما دقت ها را به صورت زیر مشخص کرده ایم:
دقت گشتاور: در داخل یک دامنه ی سرعت 2 تا 100 درصدی و یک دامنه ی بار 10 تا 100 درصدی، دقت گشتاور، 2 درصد است.
دقت سرعت: در داخل دامنه ی سرعت 2 تا 100 درصدی و دامنه ی بار 10 تا 100 درصدی، دقت سرعت 10 درصد انحراف الکتروموتور است.
انحراف الکتروموتور یک الکتروموتور 37 کیلوولتی حدود 2 درصد است که باعث دقت سرعت 0.2 درصدی می شود.
محدودیت های DTC کدامند؟
اگر الکتروموتورهای متعددی به صورت موازی در یک اینورتر کنترل شده با DTC به هم وصل شده باشند، این آرایش به صورت یک الکتروموتور بزرگ عمل می کند.
هیچ اطلاعاتی در مورد حالت هر الکترومتور منفرد ندارد.
اگر تعداد الکتروموتورها تغییر کند یا توان الکتروموتور زیر 8/1 توان مجاز باقی بماند، بهترین حالت برای انتخاب ماکرو کنترل اسکالر است.
آیا DTC می تواند با هر نوع موتور القایی کار کند؟
بله، هر نوع الکتروموتورقفس سنجابی غیرهمسان.
فصل 4 – تئوری اصولی کنترل
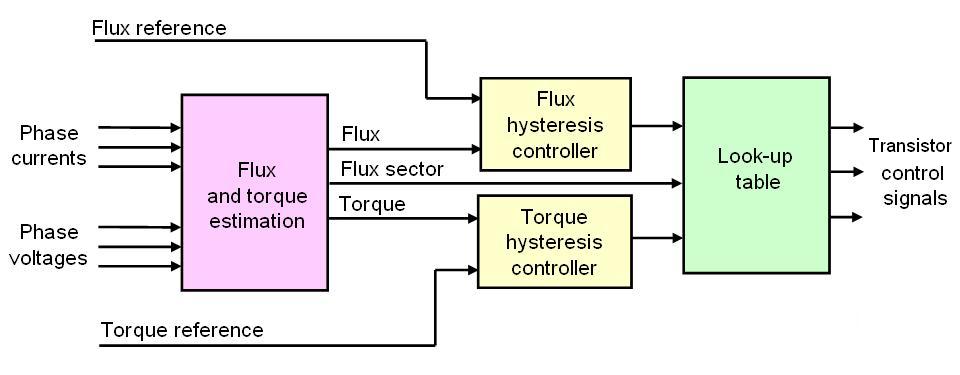
DTC چگونه کار می کند؟
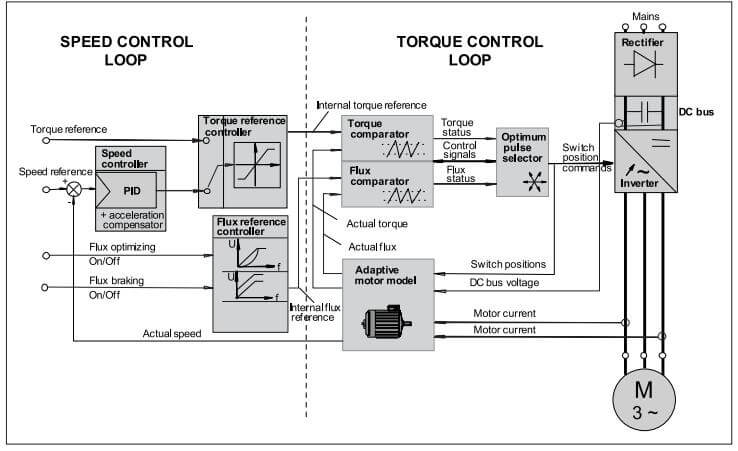
شکل5: DTC شامل دو بلوک کلیدی می شود: کنترل سرعت و کنترل گشتاور
نمودار بلوک نشان می دهد که DTC دارای دو بخش اساسی است:
حلقه ی کنترل گشتاور و حلقه ی کنترل سرعت.
اکنون ما در اطراف بلوک ها خواهیم گشت تا هر مرحله را جست و جو کنیم
و نشان دهیم که چگونه باهم جمع شده اند؟
اجازه دهید با حلقه ی کنترل گشتاور DTC شروع کنیم.
حلقه ی کنترل گشتاور
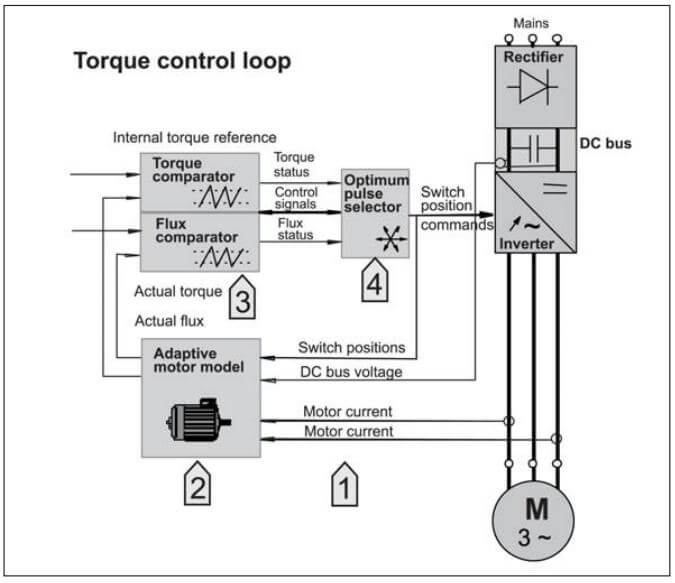
در عملکرد نرمال، دو جریان فاز الکتروموتور و ولتاژ باس DC به راحتی، با هم با موقعیت های سوویچ اینورتر، اندازه گیری شده اند.
گام 2 مدل انطباقی الکتروموتور
اطلاعات اندازه گیری شده از روی الکتروموتور بر روی مدل انطباقی الکتروموتور پیاده شده است.
تکمیل این مدل الکتروموتور محاسبه داده های دقیق در مورد الکتروموتور را مجاز می کند.
قبل از وارد عمل شدن درایو DTC، مدل الکتروموتور اطلاعاتی را در مورد الکتروموتور عرضه کرده است
که در مدت اجرای تطبیق الکتروموتور جمع آوری شده است.
به این تنظیم خودکار گفته می شود و اطلاعاتی مانند مقاومت استاتور، اندوکتانس متقابل و ضرایب اشباع همراه با انرسی الکتروموتور تعیین شده اند.
تعیین پارامترهای مدل الکتروموتور می تواند بدون محور دوار الکتروموتور صورت بگیرد.
این موضوع به کار گیری فناوری DTC را در بروز رسانی های سیستمی نیز آسان می کند.
تنظیم بسیار دقیق مدل الکتروموتور وقتی بدست می آید
که اجرای تطبیقی شامل راه اندازی محور الکتروموتور برای چندین ثانیه باشد.
اگر نیاز به دقت سرعت استاتیک بالای 0.5 درصد، همان دقت مربوط به اکثر کاربردهای صنعتی، باشد،
هیچ نیازی به بازخورد هر سرعت یا مکان محور با تاکومترها یا انکودر ها وجود ندارد.
این یک پیشرفت چشم گیر در تمام فناوری های درایو AC دیگر است.
مدل موتور، در حقیقت، کلیدی برلی عملکرد سرعت پایین بی نظیر DTC است.
مدل الکتروموتور، سیگنال های کنترل را خارج می کند
که به طور مستقیم گشتاور حقیقی الکتروموتور و شار حقیقی استاتور را نشان می دهد.
همچنین سرعت محور در داخل مدل الکتروموتور محاسبه شده است.
گام 3 مقایسه گر گشتاور و مقایسه گر شار
اطلاعات برای کنترل سیوویچ های برق از روی مقایسه گر های گشتاور و شار بوجود آمده است.
هم گشتاور حقیقی هم شار حقیقی بر روی مقایسه گرها اعمال شده اند،
جایی که آن ها هر 25 میکروثانیه، با مقدار مبناب گشتاور و شار محاسبه شده اند.
سیگنال های وضعیت گشتاور و شار با استفاده یک روش کنترل پسماند دو سطحی محاسبه شده است.
سیگنال ها سپس بر روی سلکتور پالس مطلوب اعمال شده اند.
گام 4 سلکتور پالس مطلوب
در داخل سلکتورهای پالس مطلوب، جدیدترین پردازنده ی سیگنال دیجیتال DSp 40 مگاهرتزی همراه با سخت افزار ASIC است تا منطق سیوویچینگ اینورتر را مشحص کند.
علاوه بر این، همه ی سیگنال های کنترل از میان لینک ها برای انتقال اطلاعات با سرعت بالا انتقال یافته اند.
این پیکربندی سرعت بسیار بالای پردازش را به همراه می آورد،
مثل اینکه هر 25 میکروثانیه دستگاه های راه گزینی نیمه رسانای اینورتر با یک پالس مناسب تغذیه شده اند
تا به گشتاور دقیق الکتروموتور دست یابند یا آن را حفظ کنند.
ترکیب صحیح سوویچ در هر چرخه ی کنترل تعیین شده است.
هیچ الگوی از پیش تعیین شده ای برای راه گزینی وجود ندارد.
به DTC، راه گزینی ” درست بموقع ” نسبت داده شده است،
زیرا برخلاف درایوهای PWM سنتی که در آن ها تا 30 درصد همه ی تغییرات سوویچ غیرضروری هستند،
با DTC هر و همه ی راه گزینی ها مورد نیاز هستند و مورد استفاده قرار گرفته اند.
این سرعت بالای سوویچینگ در موفقیت DTC نقش اساسی دارد.
پارامترهای اصلی کنترل الکتروموتور 40,000 بار در هر ثانیه به روز شده اند.
این امر پاسخ سریع بر روی محور را مجاز کرده و ضروری است،
بنابراین مدل الکتروموتور (مشاهده ی گام 2) می تواند این اطلاعات را به روزرسانی کند.
سرعت این پردازش است که اشکال عملکردی بالا شامل دقت کنترل سرعت استاتیک ± 0.5 درصد، بدون انکودر، و پاسخ گشتاور کمتر از 2 میلی ثانیه را به همراه می آورد.
کنترل سرعت
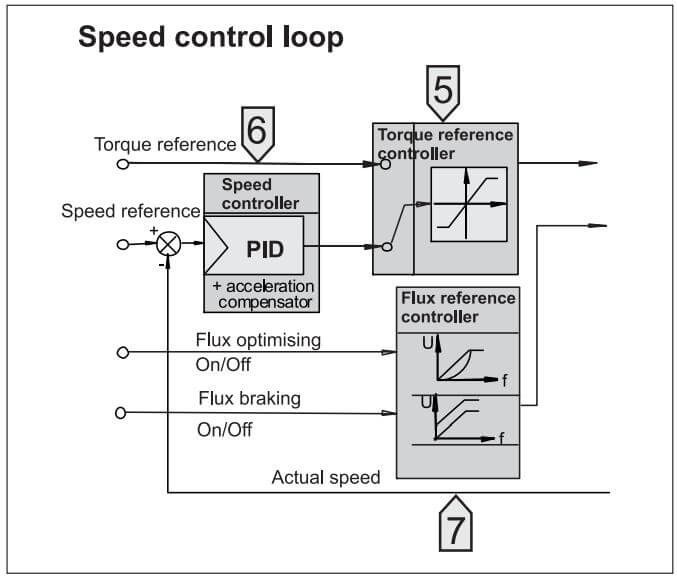
گام 5 کنترل مستقیم گشتاور
در میان کنترل کننده مرجع گشتاور، خروجی کنترل سرعت توسط محدوده های گشتاور و ولتاژ باس DC محدود شده است.
همچنین شامل کنترل سرعت برای مواردی می شود که از یک سیگنال گشتاور خارجی استفاده شده است.
مرجع گشتاور داخلی از این بلوک بر روی مقایسه گر گشتاور اعمال شده است.
گام 6 کنترل کننده ی سرعت
بلوک کنترل کننده ی سرعت شامل کنترل کننده ی PID و یک مقایسه گر سرعت می باشد.
سیگنال مبنای سرعت خارجی با سرعت حقیقی تولید شده در مدل الکتروموتور مقایسه شده است.
سیگنال خطا سپس بر روی کنترل کننده ی PID و مقایسه گر سرعت اعمال شده است.
خروجی، مجموع خروجی های هر دوی آن ها است.
گام 7 کنترل کننده ی منبع شار
یک مقدار مطلق از شار استاتور می تواند از کنترل کننده ی منبع شار به بلوک مقایسه گر شار داده شود.
توانایی کنترل و تصحیحی این مقدار مطلق، یک راه ساده برای آگاهی از بسیاری از توابع اینورتر، مانند بهینه سازی شار و ترمز شار می باشد ( مشاهده شکل 21).
با تشکر از مطالعه شما.
الکترومارکت را به اشتراک بگذارید.
🙂 محبت و دانش را به اشتراک بگذاریم
“نظرات شما را میخوانیم و به آن ها فکر میکنیم.
اگر روش های دیگری را که حاصل از مطالعه و تجربه شما دوستان عزیز است با ما به اشتراک بگذارید خوشحال میشویم لطفا در قسمت نظرات عنوان فرمایید.
ما در 24 ساعت از 7 روز هفته منتظر شنیدن صدای شما هستیم
09122659154






سلام
ممنون از مطلب مفیدتون
این قسمت جا افتاده بود که براتون گذاشتم
is taken into account by motor model when calculating the actual flux
وقت تلف شده با مدل الکتروموتوری در زمان محاسبه شار اندازه گیری و مورد محاسبه قرار گرفته است.
ممنون از توجه شما
سلام
مهندس لطفا در مورد کنترل دور موتورهای DC با اینورتر
سلام
مهندس لطفا در مورد آموزش کنترل دور موتورهای DC به وسیله اینورتر و اینکودر و تاکو مطلب بزارین
با تشکر
سلام
لطفا مقاله فوق را مطالعه فرمایید سوالی بود در خدمت شما هستم
http://electromarket.ir/introducing-digital-dc-inverter-santerno/