در دنیای صنعتی امروز، کنترل دقیق موتورهای الکتریکی نقش کلیدی در افزایش بهرهوری و ایمنی دارد. اگر به دنبال راهحلهایی برای توقف سریع و ایمن ماشینآلات سنگین هستید، درک مفهوم ترمز دینامیکی ضروری است. این مقاله به بررسی نکات جالب و کاربردی در مورد ترمز موتورهای الکتریکی میپردازد و به شما کمک میکند تا با فناوریهای پیشرفته آشنا شوید. برای خرید مقاومت ترمز با کیفیت بالا، میتوانید به صفحه محصولات مقاومت ترمز الکترومارکت مراجعه کنید. همچنین، اگر علاقهمند به مقالات مرتبط هستید، مقاله راهنمای انتخاب اینورتر (VFD) را مطالعه کنید.
مقدمه: شروعی برای یک مشکل بزرگ
تصور کنید یک ماشین صنعتی سنگین با اینرسی بالا در حال کار است. چه هدف، توقف سریع یک سانتریفیوژ عظیم باشد یا کنترل سرعت یک بار دائمی در حال حرکت مانند یک آسانسور در حال پایین آمدن، چالش یکی است: مدیریت انرژی. پس از قطع برق، اینرسی باعث میشود موتور به چرخش ادامه دهد. این زمان هرزگردی نه تنها بهرهوری را کاهش میدهد، بلکه میتواند خطرات ایمنی نیز به همراه داشته باشد. راه حل چیست؟ پاسخ در سیستمی هوشمندانه به نام «ترمز دینامیکی» و قطعهای کلیدی به نام «مقاومت ترمز» نهفته است. این سیستم به طرز شگفتانگیزی، با تبدیل موتور به یک ژنراتور موقت و سپس تبدیل انرژی الکتریکی اضافی به گرما، فرآیند توقف را در چند ثانیه مدیریت میکند.
ترمز دینامیکی، که گاهی به عنوان ترمز رئوستاتیک نیز شناخته میشود، انرژی جنبشی را به انرژی الکتریکی تبدیل کرده و آن را از طریق مقاومت ترمز به گرما دفع میکند. این روش در صنایع مختلفی مانند آسانسورها، جرثقیلها و ماشینآلات تولیدی کاربرد دارد و میتواند زمان توقف را به طور چشمگیری کاهش دهد. برای اطلاعات بیشتر در مورد کاربردهای صنعتی، به خدمات اتوماسیون صنعتی الکترومارکت مراجعه کنید.
به دنبال یه ترمز مقاومتی مطمئن برای موتورهای صنعتی هستید؟ مقاله جامع EMDBU600 الکترومارکت رو بخونید! راهنمای کامل نصب، ایمنی و عیبیابی برای بهینهسازی سیستمهای شما.
🔗 https://electromarket.ir/emdbu600-brake-unit-guide/
۱. موتور شما هنگام توقف به یک ژنراتور تبدیل میشود!
شاید عجیب به نظر برسد، اما وقتی برق یک موتور در حال چرخش را قطع میکنید، به خصوص در زمان کاهش سرعت سریع یا تحت بارهای با اینرسی بالا، موتور دقیقاً برعکس عمل میکند. به جای مصرف انرژی، مانند یک ژنراتور شروع به تولید انرژی الکتریکی میکند. این پدیده که به آن «ولتاژ احیاکننده» (Regenerative Voltage) میگویند، انرژی تولید شده را به سمت درایو (اینورتر) بازمیگرداند.
این جریان معکوس انرژی به لطف وجود دیودهای احیاکننده (Regeneration Diodes)، که به آنها دیودهای هرزگرد نیز گفته میشود و به صورت موازی با ترانزیستورهای اصلی درایو قرار دارند، امکانپذیر میشود. هنگامی که ولتاژ تولیدی موتور از ولتاژ باس DC درایو بیشتر میشود، این دیودها روشن شده و اجازه میدهند جریان به باس DC بازگردد. مشکل از اینجا شروع میشود که این ولتاژ اضافی باعث افزایش ولتاژ باس DC میگردد. اگر این ولتاژ از حد مجاز فراتر رود، درایو برای محافظت از خود، با خطای «اضافه ولتاژ» (Overvoltage) متوقف (Trip) میشود و موتور به حالت هرزگردی در میآید.
برای جلوگیری از این مشکل، استفاده از مقاومت ترمز ضروری است. در الکترومارکت، میتوانید مقاومتهای ترمز با کیفیت بالا را پیدا کنید که با درایوهای مختلف سازگار هستند.
مزایای تبدیل موتور به ژنراتور
-
افزایش ایمنی با توقف سریعتر.
-
صرفهجویی در انرژی با بازگرداندن بخشی از انرژی به سیستم (در سیستمهای احیاکننده پیشرفته).
-
کاهش سایش مکانیکی در مقایسه با ترمزهای مکانیکی.
۲. تفاوت حیرتانگیز است: از چند دقیقه تا چند ثانیه
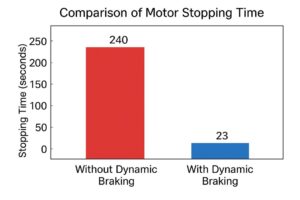
برای درک بهتر تأثیر ترمز دینامیکی، بهتر است به یک مثال واقعی و ملموس نگاه کنیم. در یک آزمایش عملی، موتوری که به یک فلایویل سنگین متصل بود، مورد بررسی قرار گرفت. زمانی که این موتور در حالت عادی و بدون سیستم ترمز خاموش میشد، حدود ۴ دقیقه طول میکشید تا به توقف کامل برسد.
اما با استفاده از سیستم ترمز دینامیکی و یک مقاومت ترمز مناسب، همین موتور در عرض تنها ۲۳ ثانیه به طور کامل متوقف شد. این کاهش چشمگیر در زمان توقف، اهمیت این فناوری را به خوبی نشان میدهد.
ما زمان توقف را از چهار دقیقه بدون ترمز به ۲۳ ثانیه رساندیم… این میتواند بسیار حیاتی باشد… صرفهجویی چند دقیقهای در طول روزهای متوالی، هزینه نصب یک ترمز دینامیکی را به سرعت جبران میکند.
در صنایع، این تفاوت میتواند به معنای افزایش تولید و کاهش downtime باشد.
|
وضعیت |
زمان توقف (ثانیه) |
مزایا |
|---|---|---|
|
بدون ترمز دینامیکی |
240 |
ساده، اما کند و ناامن |
|
با ترمز دینامیکی |
23 |
سریع، ایمن، صرفهجویی در انرژی |
۳. خطر اصلی، مقاومتِ «بسیار کم» است، نه بسیار زیاد!
یک تصور غلط رایج این است که هرچه مقدار مقاومت (اُهم) کمتر باشد، موتور سریعتر متوقف میشود و عملکرد بهتری خواهیم داشت. این تصور نه تنها اشتباه، بلکه بسیار خطرناک است. هر درایو (اینورتر) یک مقدار حداقلی برای مقاومت ترمز مشخص میکند که هرگز نباید از آن کمتر باشد.
با استفاده از قانون ساده اهم (جریان = ولتاژ / مقاومت)، میتوان فهمید که اگر مقدار مقاومت از حد مجاز کمتر باشد، جریان عبوری از ترانزیستور ترمزِ داخل درایو (که وظیفه سوئیچ کردن انرژی به سمت مقاومت را دارد) بیش از حد زیاد میشود. این جریان بالا میتواند باعث سوختن و آسیب دائمی به این ترانزیستور و در نتیجه، خرابی درایو شود. بنابراین، اولین قدم در انتخاب مقاومت ترمز، مراجعه به دفترچه راهنمای فنی درایو برای یافتن حداقل مقدار مقاومت مجاز (به اهم) است. انتخاب مقداری کمتر از این حد، مسیری مستقیم برای آسیب رساندن به درایو شماست.
برای انتخاب صحیح، به راهنمای انتخاب مقاومت ترمز الکترومارکت مراجعه کنید.
نکات کلیدی در انتخاب مقاومت
-
حداقل مقاومت: بر اساس مشخصات VFD.
-
ظرفیت توان: بر اساس چرخه کاری (duty cycle).
-
نصب: در مکان با تهویه مناسب.
۴. هدف اصلی، تولید گرماست (و مقدار زیادی از آن)
وظیفه اصلی و تنها وظیفه مقاومت ترمز، تبدیل انرژی الکتریکی ناخواسته و اضافی تولید شده توسط موتور به انرژی گرمایی است. در واقع، این قطعه با داغ شدن، انرژی مخرب را از سیستم حذف میکند و به درایو اجازه میدهد ولتاژ باس DC را در سطح ایمن نگه دارد.
به دلیل تولید حرارت قابل توجه، این مقاومتها باید در مکانی با تهویه مناسب نصب شوند. اغلب بهترین روش، نصب آنها در خارج از تابلو برق اصلی است، زیرا گرمای قابل توجهی که تولید میکنند میتواند بر عملکرد و طول عمر سایر قطعات الکترونیکی حساس داخل تابلو، مانند خود درایو، PLC یا منابع تغذیه، تأثیر منفی بگذارد. برای مدیریت مؤثر این حرارت، مقاومتهای ترمز آلومینیومی برند «الکترومارکت» بهترین گزینه به شمار میروند. این مقاومتها با طراحی استاندارد، ضد آب و ضد ضربه، برای دفع حرارت به بهترین شکل ممکن ساخته شدهاند.
در سیستمهای پیشرفته، میتوان از خنککنندههای اضافی استفاده کرد. برای خرید، به مقاومتهای آلومینیومی الکترومارکت سر بزنید.

۵. این یک سیستم است: درایو، چاپر و مقاومت
ترمز دینامیکی حاصل عملکرد هماهنگ سه بخش است. در داخل درایوهای مدرن، یک مدار سوئیچینگ بسیار سریع که معمولاً یک IGBT است، به نام «مدار چاپر» (Chopper Circuit) وجود دارد. این مدار مانند یک نگهبان هوشمند و دقیق عمل میکند.
فرآیند به این صورت است که مدار چاپر به طور مداوم ولتاژ باس DC را کنترل میکند. به محض اینکه ولتاژ از حد معینی بالاتر رفت، چاپر روشن شده و انرژی اضافی را به سمت مقاومت ترمز خارجی هدایت میکند. این فرآیند در واقع مدولاسیون عرض پالس DC (PWM) نامیده میشود. چاپر صرفاً یک دروازه را باز نمیکند؛ بلکه با فرکانس بسیار بالا روشن و خاموش میشود و مقدار انرژی ارسالی به مقاومت را به دقت کنترل میکند. این کار تضمین میکند که ولتاژ باس DC بدون افت ناگهانی در سطح پایداری باقی بماند و ترمزی نرم و کنترلشده را فراهم آورد.
برای راهاندازی چنین سیستمی، خدمات نصب الکترومارکت را امتحان کنید: خدمات نصب و راهاندازی.
|
اجزا |
عملکرد |
اهمیت |
|---|---|---|
|
درایو (VFD) |
کنترل سرعت و ولتاژ |
مدیریت کلی سیستم |
|
چاپر |
سوئیچینگ انرژی |
کنترل دقیق ولتاژ |
|
مقاومت ترمز |
دفع انرژی به گرما |
جلوگیری از اضافه ولتاژ |
نتیجهگیری: یک فکر نهایی
همانطور که دیدیم، ترمز موتورهای الکتریکی یک فرآیند غیرفعال و ساده نیست، بلکه یک مدیریت انرژی فعال و هوشمندانه است که در آن موتور به ژنراتور تبدیل شده و انرژی اضافی آن به صورت کنترلشده به گرما تبدیل میشود. این سیستم از آسیب به درایو جلوگیری کرده و بهرهوری و ایمنی را به شکل چشمگیری افزایش میدهد.
دفعه بعد که توقف آنی و دقیق یک دستگاه صنعتی بزرگ را مشاهده کردید، آیا به انرژی نامرئی که برای این توقف کنترلشده به گرما تبدیل میشود، فکر خواهید کرد؟
برای انتخاب بهترین و مناسبترین مقاومت ترمز برای کاربرد خود، میتوانید با مهندسین «الکترومارکت» تماس گرفته و از مشاوره تخصصی آنها بهرهمند شوید.
 تماس با ما – الکترومارکت
تماس با ما – الکترومارکت الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست.
الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست. دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷
دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷ تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴
تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴ وبسایت:
وبسایت:  در دسترس برای مشاوره رایگان
در دسترس برای مشاوره رایگان