چگونه گشتاور و سرعت موتور را به صورت دقیق تعیین کنیم؟
آنچه از گشتاور و سرعت موتور آموختم
محدوده تعیین گشتاور و سرعت موتور اجرایی:
به دست آوردن محدوده مطلوب گشتاور و سرعت موتور دلخواه، بر اساس نوع کاربردی که وجود دارد ممکن است کاری دشوار باشد.
به طور کلی بر اساس اندازه موتور و نوع بار، محدوده بسیار وسیعی برای یک موتور خاص نیاز خواهد بود.
بروزرسانی توسط الکترومارکت در 15 آبان 1396
فرکانس کاری کمتر از 6 هرتز
انتخاب های اشتباه باعث میشود اجرا و کارکرد موتور در سرعت های بسیار پایین حاصل شود،
فرکانس پایین تر از ( کمتر از 6 هرتز) و همچنین اجرا در سرعت بسیار بالا،
فرکانس های بسیار بالا ( به عنوان مثال بالاتر از 90 هرتز) این فرکانس کاری در حال اجرا بیان گر انتخاب اشتباه و عدم محاسبه دقیق گشتاور و سرعت موتور است.
How to determine motor torque and speed requirements
سرعت سنکرون موتور با فرکانس خروجی اینورتر به طور مستقیم تغییر می کند.
بنابراین، برای به دست آوردن فرکانس مورد نیاز در دستیابی به سرعت مورد نظر برای یک کاربرد خاص، باید سرعت دلخواه بر روی سرعت نامی موتور تقسیم شود و سپس به فرکانس نامی آن ضرب گردد.
به عنوان مثال: 4.375=50×1440÷126
در مثال فوق ما زمانی که نیاز به 126 دور در دقیقه در خروجی الکتروموتور داریم باید بدانیم که نیاز به فرکانس کاری 4.375 و این فرکانس خیلی پایین است.
اگر حداقل فرکانس و حداکثر فرکانس، نزدیک یا خارج از محدوده (زیر 6 هرتز و تا سقف 90 هرتز) ذکر شده در بالا باشد، باید قبل از هر کاری اطلاعات موتور رو مورد بررسی قرارداد و با تولید کننده موتور تماس گرفته شود.
اگر موتور تحمل کار در این محدوده را ندارد باید این وضعیت را بهبود ببخشید.
نمونه هایی از محدوده سرعت در جدول زیر بیان شده است. تمامی این موارد به عنوان نسبتی از سرعت پایه موتور به سرعت حدقل نشان داده شده است.
نمونه های محدوده سرعت گشتاور متغیر و ثابت:
(سرعت پایه=2500RPM)
| نسبت محدوده سرعت | % سرعت پایه موتور | سرعت حداقل (RPM) |
| 2:1 | 50 | 1250 |
| 4:1 | 25 | 625 |
| 10:1 | 10 | 250 |
| 20:1 | 5 | 125 |
| 100:1 | 1 | 25 |
برنامه های کاربردی اسب بخار ثابت، محدوده سرعتی دارند که در آن سرعت پایه پایین ترین سرعت است.
نمونه هایی از محدوده سرعت اسب بخار ثابت
(سرعت پایه=2500RPM)
| نسبت محدوده سرعت | % سرعت پایه موتور | حداقل سرعت (RPM) |
| 1.5:1 | 150 | 3750 |
| 2:1 | 200 | 5000 |
| 3:1 | 300 | 7500 |
توجه: تمامی نمونه هایی که برای محدوده سرعت بیان شده است تنها برای مقاصد تصویری است. هیچ موتوری نمی تواند در این محدوده سرعت کار کند.
گشتاور و سرعت موتور (Breakaway Torque):
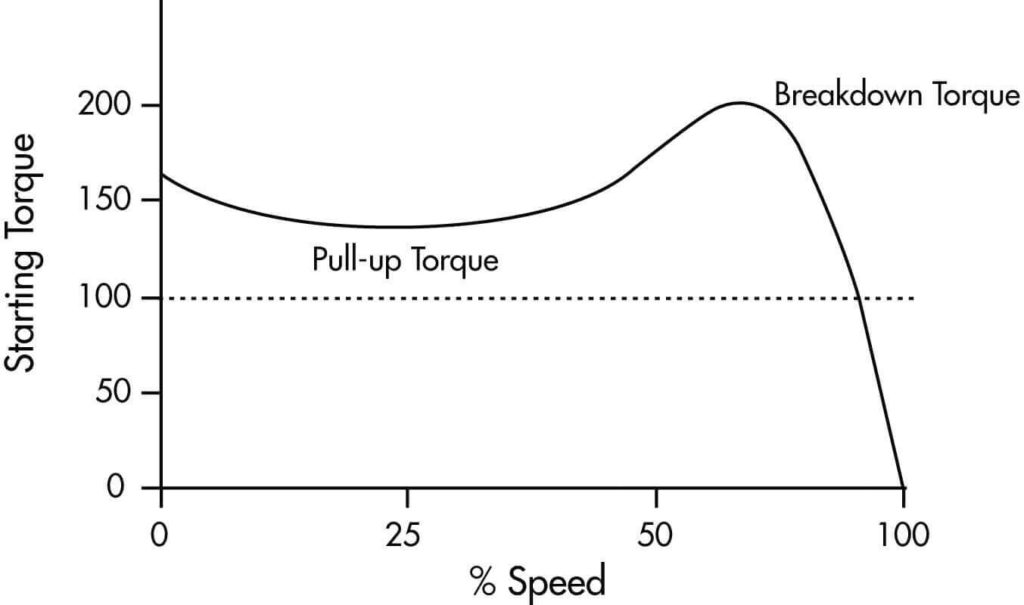
برای اینکه موتور بتواند باری را آغاز کند و شروع به حرکت کند باید گشتاور گریز کافی داشته باشد.
speed requirements
این گزینه مربوط به روتور قفل شده موتور یا گشتاور آغازین برای شروع کار نیست.
گشتاور گریز
گشتاور گریز توسط موتور محدود می شود و جریان در دسترسی است که از سیستم کنترل به دست می اید.
این گزینه را می توان با تنظیم جریان راه اندازی توسط کنترلر راه اندازی یدست اورد.
اگر گشتاور استاتیک مورد نیاز برای آغاز بار از 140 درصد گشتاور بار کامل موتور بالاتر باشد، سیستم کنترل متناسب و موتوری با گشتاور کافی ممکن است نیاز باشد.
روش های متعددی برای دستیابی به گشتاور مورد نیاز وجود دارد.
این روش ها بر اساس توانایی اجزای به کار رفته مورد استفاده قرار می گیرند. این تکنیک ها باید بر اساس دستورالعمل های تولید کننده موتور استفاده شوند تا پیکربندی بهینه ای حاصل گردد.
تعیین راندمان و بار موتور الکتریکی
DETERMINING ELECTRIC MOTOR LOAD AND EFFICIENCY
بهاحتمال زیاد عملکرد موتور شما بخش بزرگی از صورتحساب برق شما را شامل میشود.
روش و فرمول محاسبه جریان الکتروموتور یا همان موتور الکتریکی از روی توان یا همان کیلووات
I(A) = 1000 × P(kW) / √3 × PF × VL-L-V
اغلب اوقات موتورها برای باری که برای آن بکار گرفتهشدهاند، ناجور، نا هماهنگ و بزرگتر از اندازه هستند و یا چندین بار باز پیچی شدهاند.
برای مقایسه هزینههای عملیاتی یک موتور استاندارد موجود با تعویض آن با یک موتور دارای اندازه و راندمان مناسب ، شما باید ساعات کارکرد، مقادیر بهبود راندمان و بار را تعیین کنید.
Part-load (نیم بار)
Part-load (نیم بار) اصطلاحی است که برای توضیح بار واقعی بکار گرفتهشده توسط موتور در مقایسه با قابلیت بار کامل نامی موتور مورد استفاده قرار میگیرد.
نیم بارهای موتور ممکن است از طریق استفاده از توان ورودی، آمپراژ و اندازهگیری های سرعت برآورد شوند.
در ادامه به اختصار در مورد چندین تکنیک برآورد بار و محاسبه بار بحث میکنیم.
رابطه بین آمپر مصرفی و گشتاور خروجی موتور سه فاز:
این سؤال در عین سادگی سؤال سختی است اگر سرچ کنید میبینید که پاسخ درستی به این سؤال حتی در منابع خارجی هم پیدا نمیکنید،
نمونه چالشی که همیشه در این رابطه مطرح میشود:
چرا یک موتور ۱۵ کیلووات ۷۵۰ دور جریان بالاتری از یک موتور ۱۵ کیلووات ۳۰۰۰ دور دارد؟
وقتی این سؤال رو از بسیاری از اساتید میپرسید باکمال تعجب میان نه فرقی نمیکند شما اشتباه میکنید …
ولی وقتی بهحسب تجربه سر ۱۰۰ یا حتی ۱۰۰۰ تا موتور با دور های مختلف رفته باشید متوجه میشید که فرق میکند و جالبتر اینکه حتی نمیشد برای این عدد نسبت خاصی هم درآورد…
نکته:
بیاییم محاسبه کنیم گشتاور ۴ موتور ۱۵ کیلووات با ۴ دور متفاوت رو باهم
موتور ۱۵ کیلووات ۳۰۰۰ دور: ۱۵kw×۹۵۵۰÷۳۰۰۰rpm=47.75 nm
موتور ۱۵ کیلووات ۱۵۰۰ دور: ۱۵kw×۹۵۵۰÷۱۵۰۰rpm=95.5 nm
موتور ۱۵ کیلووات ۹۰۰ دور: ۱۵kw×۹۵۵۰÷۹۰۰rpm=159.16 nm
موتور ۱۵ کیلووات ۷۵۰ دور: ۱۵kw×۹۵۵۰÷۷۵۰rpm=191 nm
همونطور که مشاهده میکنید موتور ۱۵ کیلووات ۷۵۰ دور نیوتن متر و گشتاور تولیدیش ۴ برابر بیشتر از یک موتور ۳۰۰۰ دور است و در کمال تعجب شاید ۱۰ درصد جریان بیشتری مصرف کند و دلیل این نکته این است که شما دور را فدای گشتاور و گشتاور را فدای دور میکنید یعنی اگر بخواهید گشتاور بالا و همچنین دور بالا را همزمان داشته باشید حتماً باید از موتوری با کیلووات یا توان بیشتری استفاده کنید.
در پروژههایی دیدهشده که مشتری بیان میکند من یک موتور ۴ کیلووات ۱۴۵۰ دور داشتم و چون میخواستم دور ماشین رو به سطح بالاتری ببرم او مدم موتور ۳۰۰۰ دور ۷.۵ کیلووات خریداری کردم سؤال میشه حالا چرا ۷.۵ کیلووات خریدی میگن چون میدانستم موتور ۳۰۰۰ درو گشتاور کمتری اعمال میکند ،ولی درنهایت موتور ۷.۵ کیلووات ۳۰۰۰ دور نمیتونه ماشین رو راهاندازی کنه و ماشین ساز با تعجب میپرسد موتور قبلی ۴ کیلووات بوده چرا این موتور با ۲ رنج توان بیشتر نمیتونه راهاندازی کنه سیستم رو …
و در جواب :ماشین ساز محترم میدانسته که وقتی دور الکتروموتور میره بالا گشتاور تولیدی موتور کاسته میشه ولی متأسفانه از محاسبه استفاده نکردن، حالا در محاسبه زیر میتونید گشتاور این دو موتور ببینید:
موتور ۴ کیلووات ۱۴۵۰ دور: ۴kw×۹۵۵۰÷۱۴۵۰rpm=26.34 nm
موتور ۷.۵ کیلووات ۳۰۰۰ دور: ۷.۵kw×۹۵۵۰÷۳۰۰۰rpm=23.87 nm
میبینید که با توجه به افزایش ۲ رنج قدرت موتور ولی بازهم گشتاور تولیدی هنوز به سطح موتور ۴ کیلووات نرسیده.
دلایل تعیین بار موتور
Reasons to Determine Motor Loading
بیشتر موتورهای الکتریکی برای راهاندازی در 50% تا 100% از بار نامی طراحی شدهاند.
حداکثر راندمان بهطور معمول نزدیک به 75% از بار نامی است.
بنابراین،یک موتور 10 اسب بخار (hp) دارای طیف بار قابل قبول 5 تا 10 hp میباشد؛ اوج راندمان در 7.5 hp است.
راندمان موتور در کمتر از حدود 50% بار بهتدریج کاهش پیدا میکند.
بههرحال، بازه و طیف یک راندمان خوب در هر یک از موتورها متغیر است و همانطور که در شکل 1 نشان دادهشده، تمایل به گسترش در طیف گستردهتری دارد.
یک موتور درزمانی که در طیفی قرار دارد که راندمان آن با کاهش بار بهطور قابلتوجهی کاهش مییابد، تحت بار در نظر گرفته میشود.
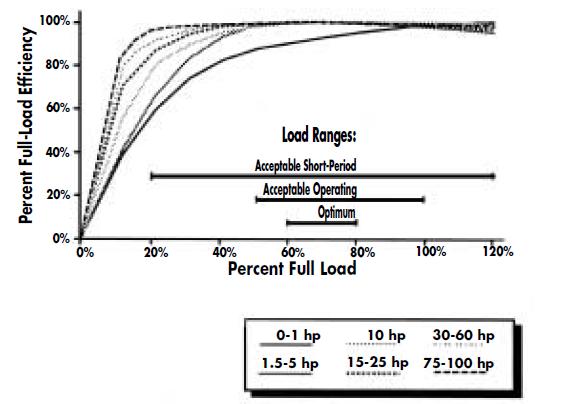
شکل 1: راندمان نیم بار موتور ( بهعنوان تابعی از % راندمان بار کامل)
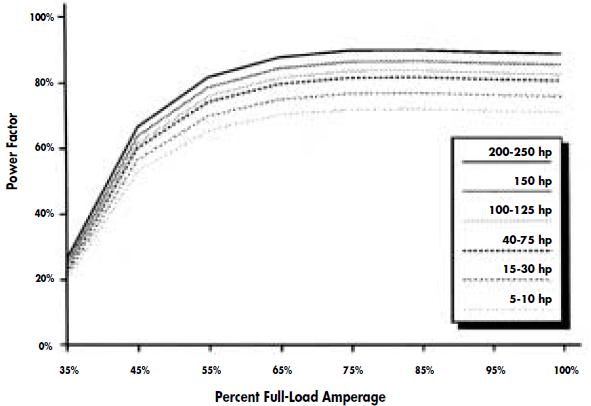
شکل 2: ضریب توان موتور ( بهعنوان تابعی از % آمپراژ بار کامل)
موتورهای آورلود شده و گشتاور و سرعت موتور
موتورهای آورلود شده میتوانند بیشازحد گرم شوند و راندمان خود را از دست بدهند.
بسیاری از موتورها با یک عامل سرویس طراحی شدهاند که موجب آورلود گاه به گاه آنها میشود.
عامل سرویس یا فاکتور خدمات (service factor) یک عامل افزایشدهنده است که نشان میدهد یک موتور چطور میتواند تحت شرایط محیطی ایدئال آورلود شود.
بهعنوان مثال، یک موتور 10-hp با عامل سرویس 1.15 میتواند در یک دوره کوتاه زمانی بدون متحمل شدن صدمات قابلتوجه، با بار 11.5-hp بکار رود.
اگرچه بسیاری از موتورها دارای عامل سرویس 1.15 هستند، اما راهاندازی موتور بهطور مداوم بالای بار نامی موجب کاهش راندمان و عمر موتور میشود.
هرگز در حالت آورلود درزمانی که ولتاژ پایینتر از ولتاژ اسمی است، یا زمانی که پروسه خنک شدن موتور با ارتفاع بیش از حد از سطح دریا، دمای بالای محیط، یا سطوح کثیف موتور مختل شده، موتور را به کار نیندازید.
دورههای کاری طولانی زیر 50% گشتاور و سرعت موتور
اگر از تجهیزاتی استفاده میکنید که موتورهای آنها برای دورههای طولانی زیر 50% بارکار میکنند، ایجاد تغییرات را در نظر بگیرید.
گاهی اوقات موتورها بیش از اندازه بزرگ هستند زیرا باید شرایط اوج را مانند زمانی که سیستم پمپاژ باید گاهی اوقات تقاضاهای بالا را برآورده کند، در خود جای دهند.
گزینههای موجود برای مطابقت با بارهای متغیر شامل موتورهای دو سرعتِ، درایوهای سرعت قابل تنظیم (اینورتر)، و استراتژیهای مدیریت بار هستند که بارها را در طیف قابلقبولی حفظ میکنند.
مشخص کردن بارگیری درست موتورها از لحاظ گشتاور و سرعت موتور
مشخص کردن بارگیری درست موتورها، شمارا قادر میسازد تا تصمیمات آگاهانهای در مورد زمان تعویض موتور و انتخاب یک جایگزین برای آن داشته باشید.
اندازهگیری بارهای موتور درزمانی که از تکنیکهای بحث شده در این مقاله استفاده کنید، نسبتاً آسان و سریع است.
شما باید بار موتور و آنالیز راندمان را برای همه موتورهای اصلی در حال کار بهعنوان بخشی از برنامه تعمیرات و نگهداری پیشگیرانه و حفاظت از انرژی اجرا کنید.
از جداول و عکس ها و گراف های داده شده در این مقاله ،” پلاک اسم موتور و فرم دادههای آزمون عملی” برای ثبت دادههای پلاک اسم موتور و اندازهگیری های میدانی استفاده کنید.
تیم مهندسی الکترومارکت توصیه میکند که همه موتورهایی که بالای 1000 ساعت در هرسال کار میکنند را موردبررسی دقیق قرار دهید.
با استفاده از نتایج آنالیز، موتورها را به دستههای زیر تقسیم کنید:
- موتورهایی که تحت بار هستند و دارای اندازه بزرگ و قابلتوجهی میباشند:
در فرصت بعدی مانند زمان برنامهریزیشده برای خاموشی دستگاه، آنها را با مدلهای کارآمدتر و اندازه مناسبتر تعویض کنید. - موتورهایی که تحت بار هستند و تا حدودی بزرگتر از اندازه میباشند:
درزمانی که خراب میشوند، آنها را با مدلهای کارآمدتر و اندازه مناسبتر تعویض کنید.
موتور دارای مصرف بهینه انرژی
موتورهایی که دارای اندازه متناسب اما راندمان استانداردی هستند:
درزمانی که خراب میشوند آنها را با مدلهای دارای مصرف بهینه انرژی تعویض کنید.
مقرونبهصرفه بودن خرید یک موتور دارای مصرف بهینه انرژی، به ساعاتی که موتور مورداستفاده قرار میگیرد،
هزینه برق، و نرخ افزوده قیمت خرید یک موتور دارای مصرف بهینه انرژی بستگی دارد.
در ادامه فرمی خدمتتان ارایه میدهیم که میتوانید با آن : “فرم محاسبه صرفهجویی در انرژی موتور،”
برای تعیین مقرونبهصرفه بودن گزینههای تعویض موتور استفاده کنید.
ادامه دارد//
منتظر بخش دوم این مقاله باشید….
گشتاور و سرعت موتور و سخن آخر
بهترین پیشنهاد انتخاب الکترو موتوری در بازه مناسب گشتاور و سرعت موتور است
تا نیاز نباشد تجهیزات راه اندازی قوی خریداری شود برای بدست اوردن توان بالا در سرعت پایین.
اگر الکتروموتور شما در فرکانس زیر 25 هرتز به صورت دائمی کار میکند حتما از فن اکسترنال استفاده شود،
در فرکانس های زیر 25 پروانه موتور قادر به خنک کردن الکتروموتور نیست.
بهترین پیشنهاد برای راه اندازی الکتروموتور شامل سه پیشنهاد است:
1-انتخاب یک اینورتر مناسب. (راهنمای خرید و انتخاب اینورتر VFD)
2-انتخاب یک سافت استارتر مناسب. (نحوه انتخاب سافت استارتر طبق منحنی گشتاور)
3-انتخاب یک الکتروموتور مناسب. (راهنمای انتخاب و کاربرد موتور پربازده)
یک توصیه دوستانه: سیستم راه اندازی کنتاکتوری (D-O-L) را برای همیشه فراموش کنید.
“نظرات شما را میخوانیم و به آن ها فکر میکنیم. اگر روش های دیگری را که حاصل از مطالعه و تجربه شما دوستان عزیز است خوشحال میشویم در قسمت نظرات عنوان فرمایید.
ما در 24 ساعت از 7 روز هفته منتظر شنیدن صدای شما هستیم
09122659154
با تشکر از مطالعه شما .الکترومارکت را به اشتراک بگذارید.
سلام
موتورهای خط نورد گرم میلگرد با نوع دی سی اگه rpm
بیاد زیر دور بیس عملا چه اتفاقی میوفته میشه توضیح علمی بدید، من که تجربه کردم موتور لخت کار میکنه و سریه امپر میکشه
داداش، مواد مصرفیت چیه؟!؟
۲۰ هزار هرتز!!!
بعد خیال کردی مثلا: دانشمندای برق به عقل شون خطور نکرده یه چنین کاری بکنند!!!
این چه طرز مثال زدن برای فهم تئوری گشتاوره؟!؟
گشتاور به صورت خیلی ساده، به قدرت سرعت گیری الکتروموتور ها، در لحضه ی شروع و کار نامی است.
حالا یک سوال جواب من رو بده، اگه واقعا ادعای دعایه برق رو داری، اگه فرکانس ۵۰ برای الکتروموتور های Ac #گشتاور. کمی داره، پس چطور برای الکتروموتور های Dc گشتاور زیادی داره؟!؟
سلام، وقتتون بخیر ،
من یک الکترو موتور میخوام بخرم که دور ۳۰۰۰ واقعی داشته باشه ، چه مشخصاتی باید داشته باشه ؟
…
این مشخصات یکی از موتور هاست ،
نمیدونم واقعی یا نه
دینام موتوژن سه فاز ۰.۰۹ کیلووات ۰.۱۲ اسب ۳۰۰۰ دور
میشه راهنماییم کنین ؟
باسلام خدمت مهندس رجبی عزیز
یک عدد موتور ۱۶۰ کیلووات که از طریق اینورتر راه اندازی میشد و به واسطه تسمه و فولی یک آسیاب خاک رو میچرخاند. مدتی بود دچار مشکل شده بود و این مشکل از این قرار بود که با این که بار زیادی به موتور وارد نمیشد.سرعت موتور گهگاهی کم میشد و تا حد توقف پیش میرفت انگار که زیر بار زیادی است اما جریان مصرفی آنچنان بالا نمیرفت. و فرکانس ثابتی هم داشت. بعد از اینکه صحت خود الکتروموتور و کابل کشی و ولتاژ شبکه رو بررسی کردیم هیچگونه مشکلی یافت نشد. و هر گونه تنظیمات که مربوط به درایو بود هم بررسی کردیم. در نهایت در درایو یک اتوتینینگ انجام دادیم. و بعد از انجام اتوتیونینگ مشکل حل شد و حتی بار بیشتر تا سه برابر بار معمولی را به موتور اعمال میکردیم هیچ افت سرعت یا قدرتی را در موتور مشاهده نکردیم. اینجا بود که به اهمیت اتوتیونینگ پی بردم. و اینکه آیا به نظر شما این عقیده صحت دارد یا نه. یا میتواند مشکل دیگری وجود داشته باشد.
باتشکر از مطالبتون
سلام.چندتا کتاب در مورد الکتروموتور ها (ترجیحا در مورد طراحی و انتخاب)باشه. ممنون
با سلام.
یک سوال دارم ،ممنون میشم اگر جواب بدین. میخوایم یک موتور به جک متصل کنیم که دوتا زبانه Lمانند را به عقب و جلو حرکت دهد .نکته ای که هست اینه که میخوایم نیرویی که در اثر باز و بسته شدن زبانه ها به جسم وارد میشود را به ما بدهد و اینکه سرعت زیاد موتور برامون ملاک نیست . … از طرفی هم به نظر من با تحقیقی که انجام دادم نیاز به موتوری است که سرعت و دور ثابتی داشته باشد یعنی موتورهای سنکرون… خواستم بپرسم که نظر شما چه نوع موتوری با چه مشخصاتی میباشد؟ نیرویی که به موتور وارد میشه به ازای وزن معمول یک انسان میباشد.
سلام در دستگاه های سری تراشی برای تعیین دور دستگاه و چرخ دنده ها می گویند بر اساس تجربه و سختی کار انتخاب میشه میخواستم بپرسم آیا انتخاب دور متور دستگاه محاسباتی دارد یا خیر؟
سلام
.وقت شما بخیر
ببخشید مزاحم شما شدم
مطلب رو از سایت شما خوندم
من برای ساخت یک دستگاه به موتور دی سی دوازده ولت ، با دور نهایی حدود چهل دور در دقیقه و قدرت فشار بر سطح حدود ۶۵۰ کیلوگرم بر سانتی متر نیاز دارم
برای این کار یه میل لنگ و.تور تهیه کردم و بهش پیستون وصل کردم ، شعاع میل لنگ تقریبا ۲.۳ سانتی متر هست
موتور رو با چه مشخصاتی انتخاب کنم ، این دستگاه قراره در صورت نیاز حدود حداکثر چهل و پنج دقیقه کار کنه و بعد خاموش میشه تا استفاده بعدی
همچنین این رو هم میخوام بدونم که در موتور های گیربکس دار ، آیا با کاهش سرعت ، گشتاور بالا میرود ؟ و آیا قطر میل لنگ تاثیری بر گشتاور و سرعت خروجی موتور دارد ؟
ببخشید اطاله کلام شد
سلام اقای مهندس
میشه یک ژنراتور مگنتی دور پاین را با یک الکترو گیربکس راه انداخت
شما فرمودید وقتی دور کم میشه توان افزایش پیدا میابد
توان افزایش میابد یا گشتاور؟
مثلا برای راه اندازی یک ژنراتور ۲۰kwبادور۱۵۰rpmتوربین بادی گشتاور۲۷۰نیوتن متر تولید میکند اگر ما چنین گشتاور را با الکترو گیربکس ۱.۵kw تولید کنییم ژنرا تور درخروجی۲۰kwبه ما میدهد؟
ممنون میشم اگه جواب دادین
با سلام وعرض ادب
اقای مهندس رجبی شما در چند مورد از کامنتها تون نوشتید که با کاهش دور توان افزایش میابد
توان افزایش میابد یاگشتاور؟
ومن یه سوال دیگه دارم ان اینکه
وقتی یه توربین بادی برای یک ژنراتور گشتاور تولید میکند واز ان انرژی برق تولید میشه
فرض کنیم یه توربین بادی ۴۰kwباپره ۶.۵متر گشتاور در حدود۴۰۰NM برای ژنراتور تولیدمیکند
اگر چنیین گشتاور را باالکترو گیربکس با توان۱.۵kw
بادور ۱۵۰rpmبرای ژنراتور همین توربین بادی فوق الذکر تولید کنیم در خروجی به ما۴۰kw خواهند داد؟
ممنون میشم اگه جواب دادین
با سلام.
طی تحقیقاتی که انجام دادم متوجه شدم که توان وسایل برقی بر حسب ساعت نوشته می شود.
مثلا یک لامپ ۱۰۰w در ساعت ۱۰۰ ژول انرژی مصرف می کند.
آیا موتورهای الکتریکی هم اینگونه است؟
ژنراتور القایی ۲۰kw در ثانیه ۲۰kj انرژی تولید می کند یا در ساعت؟
با اهداء سلام
آیا عملکرد کنترل دور مانند گیربکس است یعنی با کاهش دور گشتاور افزایش می یابد. دقیق تر بگویم یک موتور ۱.۵ کیلو وات ۱۴۰۰ دور است که در دور ۳۰RPM قرار است گشتاور حدود ۴۷۷ نیوتن متر بدهد آیا با کنترل دور هم به این گشتاور می رسد.
ممنونم
نه عملکردش مثل گیربکس نیست
سلام جناب مهندس
برای انتخاب گیربکس صنعتی باید از چه پارامترهایی استفاده کنیم.که در آخر هم یک الکتروموتور برای آن انتخاب کنیم
باسلام
سوالی داشتم ضریب ثابتی که برای بدست اوردن گشتاور در فرمول نوشتید از کجا آمده منظورم ۹۵۵۰ هستش
constant derived from the calculation of all factors when the numerical values for nare entered in rpm and M, in Nm.
سلام، اسپتر موتور رو چجوری میشه فهمید گشتاورشو؟
با عرض سلام
اقای مهندس میخوام ی ریز تراش درست کنم میشه لطفا راهنمایی بفرمایید از چه موتوری استفاده کنم ؟ اگر اطلاعاتی درباره گیربکس و محور اصلی دستگاه ریز تراش هم اطلاعاتی دارید ممنون میشم راهنمایی بفرمایید
سلام باید اطلاعات دقیق بهم بدین مثل عمق براده برداری و طول و عرض محور ها و جنسی که میخواهید تراش بدین یک لینک واتس آپ روی تمامی صفحات هست کلیک کنید به من وصل میشید
بسیار عالی بود مرسی از سایت خوبتون
سلام ممنون از حسن توجه شما سلامت باشید همیشه
با سلام
احتراما یک سوال داشتم
اگر یک موتور سنکرون یا آسنکرون با rpm فرضا ۳۰۰ دور بر دقیقه و توان نامی ۱۰ کیلو وات ، داشته باشیم. می توانیم با استفاده از اینورتر و کاهش سرعت rpm فرضا ۱۵۰ دور بر دقیقه از موتور توان یا گشتاور بیشتر دریافت کرد. ؟ فرضا توان ۱۵ کیلو وات
با سپاس
سلام ممنون از نگاه شما.
ببینید الگوریتم کاهش دور در درایو ها مثل گیربکس ها نیست . در گیربکس ها با کاهش دور توان افزایش پیدا میکند اون هم نه به یک مقدار برابر تلفات خود گیربکس هم باید لحاظ شود.
در تنیجه با کاهش دور توسط درایو ها توان افزایش پیدا نمیکند.
سلام جناب رجبی،پاراگراف زیر درست و یا غلط بودنش توضیح میدین
در راه اندازی کمپرسورهای هوای فشرده گشتاور متغیر می باشد و از سافت استارت نمی توان استفاده کرد چرا که سافت استارت بر خلاف vsd ها فقط بر دور کنترل دارند چون فقط ولتاژ از المانهای تحت کنترل می باشد و برای کنترل گشتاور المان فرکانس مدنظر می باشد به این دلیل از سافت استارتر ها در کمپرسورهای هوای فشرده استفاده نمی کنند
از نظر من درسته
با سلام جناب رجبی. من یه چاه آب کشاورزی دارم که عمقش حدود ۴۰ متر هست و لاین خروجی سه اینچ هست که الان موتور گازوببلی۲۴ اسب بخار رو چاه هست میخوام یه موتور برقی بزارم رو چاه. حداکثر دبی اب ۱۵ متر مکعب هست و حدود ۴۰۰ متر بعد از چاه به سر زمین اغفی میره. چه موتوری مناسبشه؟ با تشکر
با سلام من میخواستم الکتروموتور گیربکس را با یک توان بالاتری تغییر بدم بخاطر اینکه فشار کمتری بهش وارد بشه، لطفا راهنماییم کنید برای خرید الکتروموتور با توان بالاتر باید چه نکاتی را در نظر داشته باشم که هم برای کوپلینگ آن با گیربکس و هم موارد دیچر مشکلی پیش نیاد ،
با تشکر از شما دوست عزیز
سلام
در انتخاب الکتروموتور و خصوصا کار شما باید به چند نکته توجه کنید: نکته اول سایز بدنه موتور.
نکته دوم سایز شافت موتور.
نکته سوم دور موتور.
نکته چهارم جریان نامی موتور و حتما توجه کنید درایو مورد نظر را نیز باید متناسب با جریان موتور انتخاب شده انتخاب کنید.
سلام…
من یک بخاری برقی گازسوز ۱۲۵ ولت ژاپنی OSAKA GAS دارم که اشتباهی برق ۲۲۰ واردش شد بعد که فیوز سوخته ۱۲۵V 3A رو عوض کردم و به مبدل برق ۱۱۰ اون یکی بخاری که لنگه خودشه و سالمه زدم باز فیوز سوخت و بوی سوختگی از پایه سوکت روی کیت بلند شد و سیاه شد مشکل چیه ایا ترانزیستورها اسیب دیدن ممنون
سلام با تشکر از شما میخواستم نحوه اندازه گیری گشتاور موتور های dc و همچنین موتورهای آهنربای دایمی دی سی را اگه ممکنه بگویید
با تشکر تیمورشاهی
تنها راه اندازه گیری دقیق و مکانیکی گشتاور موتور ها نصب ترک متر بین شافت موتور و مصرف کننده نیرو است.
سلام وقت بخیر
من نفهمیدم اونجا که گفتین موتور ۷۵۰ دور، شاید حدود ۱۰ درصد جریان بیشتری مصرف میکنه از موتور ۳۰۰۰ دور دلیلش چیه؟ از کجا میاد این اختلاف؟ و اینکه بار موتور رو چه مدلی فرض کردین؟ گشتاور ثابت، توان ثابت یا مدل دیگه؟
سلام یک رابطه ای مستقیم وجود داره بین دور موتور و کوسینوس فی موتور با مطالعه کاتالوگ موتور های معتبر این رابطه رو میتونید توی جدول معرفی موتور ها ببینید مثلا زیمنس و دانلود کنید ببینید
سلام و وقت بخیر
من رشته ام مکانیک و با مباجثی که گفتید اصلا آشنایی ندارم. اما یک سوال برام پیش اومده چون زیاد توی ساخت باهاش مواجه هستم.
برای گرداندن یک درام یا استوانه، با قطر r و لختی دورانی I، و سرعت معین omega، از چه موتوری باید استفاده کرد. درواقع میخوام بدونم اصول انتخاب موتور التریکی برای گرداندن یک استوانه چیه؟
ممنون از لطفتون
سلام جناب.
من یک موتور ۰.۳۷ کیلو وات میخوام تهیه بکنم که با یک گیربکس دور خروجی اش به ۴۰ rpm برسه و همچنین دورش از ۰ تا ۴۰ با اینورتر تنظیم بشه. با توجه به اینکه توان و دور خروجی موتور مشخص هست در نتیجه گشتاور نیز قابل محاسبه هست. اما سوال بنده اینجاست که از موتور ۰.۳۷ با چه سرعتی (۳۰۰۰ یا ۱۵۰۰ یا …)استفاده بکنم بهتر است؟ چون در انتخاب گیربکس باید نسبت تبدیل مشخص شود.
سوال دوم من اینست که آیا وقتی با اینورتر سرعت موتور رو کاهش بدیم گشتاور افزایش می یابد؟
سلام دور موتور شما بستگی به نسبت گیربکس انتخابی شما دارد ولی بهتر است ۱۵۰۰ دور انتخاب کنید.
در اینورتر های نسل جدید که قابلیت وکتور کنترل را دارا میباشند با کاهش دور گشتاور خروجی کاهش پیدا نمیکند.
سلام مهندس
میخام سیستم برق مجانی راه اندازی کنم
همراه با تصویر برایتان ارسال میکنم و سوالات فنی دارم
لطفا در تلگرام راهنماییم کنید . ممنون
۰۹۱۵۷۷۴۰۱۱۷
با سلام
من می خواستم به جای یک موتور سنکرون ۱۵۰۰ دور با توان ۰.۴ کیلووات از یک موتور آسنکرون استفاده کنم .چه مواردی مهمه ؟؟
سلام
مطلب خوبی نگاشته شد, ممنونم
فقط یه سوال برای خودروهای الکتریکی از چ نوع الکتروموتوری استفاده میشه؟حداقل توان و گشتاور این موتورها چقدره؟
برای راه اندازی خودروالکتریکی الکتروموتور دور ثابتی داره و توسط گیربکس سرعت خودرو کنترل میشه؟ یا سرعت باتغییر فرکانس تغییر میدن؟
سلام
شما در باره موتور های آهنربایی هم اطلاعاتی دارید قدرت این موتور ها چجوری محاسبه میشه آیا فرمولی وجود داره مثلا دونستن سرعت این موتورها کافیه برای محاسبه قدرت یا نه
اگر ممکنه به ایمیل من جواب رو بفرستید ممنون
سلام لطفا دقیق تر بفرمایید موتور های آهنربایی یعنی کدوم مدل موتور ها؟
با سلام و خسته نباشید خدمت مهندس عزیز.
بزرگواری کنید نحوه محاسبه و میزان گشتاور یک الکتروموتور اسپیندل ۵.۵ کیلووات رو با ۱۸۰۰۰دور در دقیقه بنویسید . سپاسگزارم
سلام ۲.۹۱ نیوتن متر میشه.
۵.۵ ضربدر ۹۵۵۰ تقسیم بر ۱۸۰۰۰
با سلام و عرض تشکر بابت پاسخگوییتون
بنده متن بالا رو خوندم اما یه سوالی دارم که جوابشو از توضیحات بالا نتونستم بفهمم. فرض کنید در یک دستگاهی یک شافتی قرار داره که بصورت عمودی قرار گرفته و باری معادل ۱۵ الی ۲۰ کیلوگرم روش هست. حالا برای چرخش این شافت با دور تقریبی ۴۰۰ تا ۵۰۰ دور مناسبترین الکتروموتور چی هست. بین الکتروموتور ۲ اسب ۱۴۰۰ دور و ۳ اسب ۱۴۰۰ دور کدومش بهتره. چون من خودم ۳ اسب استفاده میکنم اما احتمال میدم شاید نیازی به ۳ اسب نداشته باشه و ۲ اسب هم جوابگو باشه.
دقیقتر بخوام توضیح بدم یک شافت با قطر ۳۰ و طول ۱۵ سانتیمتر هست که توی دوتا یاتاقان بصورت عمودی قرار گرفته و سر شافت رفته داخل مخزن استوانه ای به قطر ۵۰ سانتیمتر و اونو میچرخونه. دور موتور هم توسط تسمه و پولی کاهش پیدا میکنه
با تشکر فراوان
سلام ممنون میشم قطر اون پولی و تسمه هارو بهم بگید و یک راه حل خیلی ساده هست برای اینکه متوجه بشید موتور انتخابی شما چقدر دقیق انتخاب شده است اون هم جریان الکتروموتور در بیشترین بار است یعنی بیشترین حد ممکن بار اعمال کنید به موتور مثلا اگر مخزن همزن است پرش کنید بعد جریان موتور رو با کلمپ متر بگیرید از جریان بدست امده خیلی راحت میشه فهمید موتور فوق چند درصد زیر بار است.
ببینید قطر پولی سرموتور ۸ و پولی سر شافت۲۵ هست. موتور چینی ۱۴۸۰ دور که آمپر پلاکش فکر کنم ۱۲ یا ۱۳ همین حدودا باشه.
میخوام یه فرمول کلی داشته باشم برای انتخاب الکتروموتور برای دستگاها. واینکه بعضی جاها چجوری باید گشتاور یا توان مورد نیاز رو تشخیص داد.. مثلا یک دستگاه همزن بقول شما، که برای هم زدن خوراک دام باشه و محورش هم افقی کار میکنه ، از کجا باید فهمید که این دستگاه با این ظرفیت حجمی که برای ریختن خوراک درنظر گرفته شده، چه توانی لازم داره که بتونه از پس کار بر بیاد. غیر از تجربه و اندازه گیری آمپر و سعی و خطا و اینجور چیزا روش مشخص دیگه ای داره که در هنگام طراحی دستگاه و قبل از ساخت بشه توان مورد نیاز رو تشخیص داد؟ فرض کنید که از گیربکس هم استفاده نشه و فقط با کوپلینگ یا تسمه و پولی باشه.
تشکر مجدد
با سلام مجدد
من ی کمپرسور دارم که روش یک هواساز هست که با ی متور ۲ اسب ۲۸۰۰ دور کار میکرده اان اگر من ی الکترومتور ۳ اسب ۱۴۴۰ دور روش بزارم چ تاثیری روی تولید هوای هواساز و فشار مخزن میزاره؟
سلام
توان و دور دو مولفه اصلی برای تمامی ماشین آلات صنعتی هستند که با الکتروموتور کار میکنند در کمپرسور ها حجم باد و سرعت تولید آن بستگی مستقیم با توان و دور موتور دارند و همچنین با انجین تولید کننده باد.
مثلا کمپرسور شما دارای واحد هواسازی با توان ۲ متر مکعب بر ثانیه است این واحد هواساز یک رنج توان و سرعت نیاز دارد تا بتواند حجم هوای نامی خود را تولید کند حالا شما اگر این خواسته را تامین نکنید قطعا به ظرفیت مورد نظر نمیرسید.
درک من از سوال شما اینه که چون توان موتور شما بالا تره ایا میتوانید موتوری با دور پایین تر انتخاب کنید؟ توان موتور حجم باد تولیدی را پشتیبانی میکند و سرعت موتور زمان پر شدن منبع را پشتیبانی میکند اگر از موتور ۳ اسب ۱۴۴۰ دور استفاده کنید سرعت پر شدن منبع باد نصف میشود مگر اینکه با فولی و تسمه دور موتور رو افزایش دهید و به عدد ۲۸۰۰ در واحد هوا ساز برسید.
سلام وقتتون بخیر
من یک الکتروموتور سه فاز با اینورتر میخوام بگیرم که یک صفحه اهنی قطر ۲۵ سانت که با فلنچ به شافت بصورت عمودی بهش وصله رو بچرخونه میشه لطفا نحوه محاسبه گشتاور مناسب برای این کار رو بگید ممنون
سلام و خسته نباشید
تاثیر دور متور در توان ثابت روی تولید یک هواساز چیه؟
۱ مثلا ی هواساز دو سیلندر داریم داریم با ظرفیت ثابت تفاوت نصب ی الکترو متور ۲ اسب ۲۸۰۰ دور با ی ۲ اسب ۱۵۰۰ دور تاثیرش تو نسبت و فشار هوای تولیدی کمپرسور چیه؟
۲ این که یک متور ۲ اسب ۲۸۰۰ دور برای این هواساز تولید هوای بیشتری رو به همراه داره یا ی متور ۳ اسب ۱۵۰۰ دور؟
متشکرم
با عرض سلامو خسته نباشید خدمت شما
طریقه محاسبه الکتروموتر برای یک دستگاه را میشه بیان کنید با تشکر از لطف شما
سلام آبا مقاله فوق را مطالعه کردید؟
با عرض سلام و ادب
بنده میخواستم بپرسم که من یک پمپ آب VKL دارم که نیاز به موتور محرکی با قدرت ۶ کیلووات و ۱۴۰۰ دور داره.. ضمن اینکه من یک موتور ۳۰۰۰ دور با قدرت ۴.۲ کیلووات از قبل دارم و میخام از این موتور برای به چرخش در آوردن پمپ استفاده کنم. بنظر شما با دوبرابر کردن پولی پمب نسبت به پولی سر موتور ضمن اینکه دور موتور کاهش پیدا میکنه قدرتش هم افزایش پیدا میکنه و به ۶کیلووات میرسه؟
در کل میخام ببینم فرمول محاسبه ش چطوره؟ این عدد ۹۵۵۰ که برای محاسبه گشتاور الکتروموتورها فرمودید، برای محاسبه گشتاور پمپ (با توجه به اینکه متحرک است و برای کار کردن نیاز به یک موتور محرک دارد) هم استفاده میشود یا نه؟
سلام خدمت شما دوست عزیز به صورت کلی با کاهش دور توسط گیربکس یا فولی و تسمه به همان نسبت کاهش توان افزایش پیدا میکند منتها حتما باید تلفات گیربکس رو لحاظ کرد که در گیربکس های مختلف این عدد متفاوت میباشد به صورت مثال من ۳۰ درصد در نظر میگیرم.
خوب حالا پمپ شما به یک موتور ۶ کیلووات و ۱۴۰۰ دور نیاز دارد این میشه معادل ۴۰ نیوتن متر نیرو و موتوری که دارین ۴.۳ کیلووات است و ۳۰۰۰ دور که میشه معادل ۱۳.۶ نیوتن متر این از درک نیاز پمپ شما و چیزی که دارین
مرحله بعد میریم سراغ کاهش دور موتور موجود و رسوندن اون به ۱۴۰۰ و بعد چک میکنیم ببینیم چند نیوتن به ما میده سر پمپ.
برای کاهش دور موتور در سر پمپ نیاز دارید که فولی سر موتور کوچک تر از فولی سر پمپ باشد تا نسبت کاهشی برقرار شود.
اگر فولی سر موتور رو ۱۰ بندازید و فولی سر پمپ رو ۲۰ سر پمپ ۱۵۰۰ دور به شما میده که برای درکش میشه گفت ۳۰۰۰ دور موتور ضربردر ۱۰ که فولی موتور باشه و عددش میشه ۳۰.۰۰۰ و این عدد رو تقسیم بر ۲۰ میکنیم که فولی سر پمپ باشه و خروجی عدد میشه ۱۵۰۰ دقیقا ۵۰ درصد دور رو کاهش دادیم و ۵۰ درصد توان رو افزایش و تلفات هم باید درنظر گرفته بشود.
اگر هیچ تلفاتی در نظر گرفته نشود نیتون متر شما میشود ۲۷ نیوتن متر که با این تفاصیل موتور فوق جواب کار شما رو نمیدهد.
با سلام
میخواستم بدونم جریان استاتور یک موتور mvکه با لیکویید استارتر استارت میشود رو چه جوری محاسبه کنم؟ممنون
قدرت یک آهن ربای دائمی چگونه محاسبه میشود؟ آیا این قدرت افت هم پیدا میکند ؟
در مورد محاسبه اش باید درخواست تون رو دقیق تر توضیح بدید برای ساخت موتور میخواهید محاسبه کنید یا …
در مورد افت قدرت باید خدمتتون عرض کنم بله کاهش قدرت اهنربا در مرور زمان امری طبیعی است.
سلام / من فقط میخوام بدونم یک آهنربا قدرتش رو چطوری میشه محاسبه کرد . ابعاد برام مهمه. چون جای کار هم برام محدوده .
سلام چند موتور یک اسب دارم که روی فن حلزونی نصب شدن ودریک اشپزخانه صنعتی مشغول به تخلیه هوای گرم محیط اشپزخانه هستند ایا با تعویض با موتورهای با توان بالاترمیتوانم دور بیشتری برای تخلیه هوای داخل اشپزخانه داشته باشم
سلام با افزایش توان موتور ها به تنهایی نمیتوانید حجم هوای بیشتری را انتقال دهید.
باید فن ها را یک رنج یا دو رنج قوی تر کنید یعنی کل بدنه فن ها را تعویض کنید با این کار حجم پروانه ها بزرگ تر و به نسبت موتور هم بزرگ تر میشود و در نهایت حجم هوای بیشتری را انتقال میدهند.
سلام
فرمول بدست آوردن جریان از روی مشخصات موتور رو میخواستم
و داستان اینکه گفته میشه جریان هر موتور دوبرابر توان موتور مورد نظر گرفته میشه چی هست
ممنون از سایت خوبتون
سلام دوست عزیز
داستان از این قرار است که برای انتخاب ها معمولا همه دنبال سریع ترین روش رسیدن به اعداد هستند و یک روش معمول که نمیدونم از کجا اومده رواج داره توان ضربدر دو میشه جریان که معمولا تا حدود زیادی درست است.
و اما روش محاسبه جریان موتور از طریق توان و ولتاژ و پاور فکتور به شرح زیر میباشد: I(A) = 1000 × P(kW) / (√۳ × PF × VL-L(V) )
خوب یه کمی سخته درک این فرمول من تعریف ساده ای ازش براتون ارایه میدم شما اول ولتاژ موتور رو مثلا ۳۸۰ ضربدر پاور فکتور مثلا ۰.۷ دهم میکنید و عدد بدست اومده ۲۶۶ رو ضربدر رادیکال سه میکنید میشه ۴۶۰.۷۲ این عدد و یک جایی نگه دارید و میرسیم به توان موتور مثلا موتور ۱۶۰ کیلووات عدد ۱۶۰ رو ضربدر ۱۰۰۰ میکنید میشه ۱۶۰.۰۰۰ بعد تقسیم بر ۴۶۰.۷۲ میکنید و در اخر جریان موتور بدست میاد که تقریبا ۳۴۷ امپر است.
این نکته گرونی بود که حتما یاد بگیرید و ازش محافظت کنید.
سلام و درود
می خواستم بدونم که برای راه اندازی یه ژنراتور ۲۰ کیلووات چه نیرویی نیاز داریم ؟ اصلا چطوری باید مشخص کنیم که از چه انجینی برای به گردش درآوردن ژنراتورمون استفاده کنیم؟ ممنونم
سلام برای گرفتن ۲۰ کیلووات توان خروجی از یک ژنراتور باید نیرویی معادل ۲۶ کیلووات صرف کنید درواقع نیروی خروجی به اضافه مجموع تلفات کل که معمولا ۳۰ درصد میشه و خروجی میشه ۲۶ کیلووات.
با سلام وخسته نباشید
جهت انجام پروژه ای نیاز به مشخصات و طریقه محاسبات تولید انرزی الکتریکی از طریق موتورهای القایی و یا ژنراتورهای آسنکرون دارم سپاسگزارم راهنمایی بفرمایید.
سلام دقیقا متوجه سوالتون نشدم
یک توصیه دوستانه: سیستم راه اندازی کنتاکتوری (D-O-L) را برای همیشه فراموش کنید.
چرا؟
اگر یک الکتروموتور که برای یک فن که همیشه با دور ثابتی کار خواهد کرد با روش ستاره مثلث راه اندازی شود که ایرادی دارد؟
سلام صنعت امروز و صنعت فردا صنعت مدیریت بهینه منابع است برق یکی از منابع مهم است که باید مدیریت شود.
یکی از صد ها قابلیت نصب درایو کاهش یا افزایش سرعت است.
به طور مثال همین موتور فن که مورد اشاره شده شما است:
نصب درایو روی فن باعث حذف جریان راه اندازی؛ مدیریت انرژی مصرفی موتور به نسبت غلظت هوا و دمای هوای جابه جا شونده؛خروجی ولتاژ و فرکانس یکسان و یکنواخت فارغ از نوسانات ولتاژ شبکه؛کنترل الکترونیکی و حفاظت کامل موتور و عدم سوختن موتور در اثر مشکلات مکانیکی؛هماهنگ شدن سرعت موتور با سرعت وزش باد و ….
کنترل صرفهجویی انرژی بهطور خودکار توسط درایو
سلام
الکتر موتور۴۰اسب ۳۰کیلووات۱۴۰۰ دور دارم میتوانم با بزرگ کردن پولی پمپ دوروارتفاع را بالا ببرم
اگه میشه راهنمایی کن تاحدممکن ارتفاع را بالا ببرم البته باخروجی۳اینچ
سلام
ببخشید چطور میشه راندمان ماشین های الکتریکی رو بالابرد؟
سلام
بهترین روش بالا بردن راندمان حذف تلفات است مراحل و روش های متفاوتی دارد که حتما در مقاله ای مفصل به آن میپردازم.
با سلام
برای گرداندن یک بار مکانیکی که سرعتش حدود ۵ rpm هست از یک موتور ۳۵۰ کیلو واتی dc استفاده شده+ جعبه دنده…پس از اپگرید شدن سیستم و تعویض لودمکانیکی طراح مجموعه نیاز به موتور ac همراه با vfd به همان توان قبلی داره یعنی۳۵۰ کیلووات… اما تیم فنیشون که بررسی کرده گفته نمیشه ازموتور dc قبلی استفاده کنیم…ممکنه راهنمایی بفرمایین چرا؟
در ضمن تیم فنی و تامین کننده یک شرکت معتبر اروپایی هست.
مرسی
سلام این که شرکت اروپایی است ملاک بر درست بودن و صحت ادعا انها نیست. اطلاعاتی که توسط شما ذکر شده خیلی مختصر است در صورت امکان هماهنگ بفرمایید یک بازدید حضوری از مجموعه داشته باشیم تا کارشناسی دقیق تر و جامع تر به عمل اورده شود.
با سلام
مهندس من یک موتور ۱۵ kw دارم میخواستم ببینم چند آمپر جریان میکشه؟سوال دوم اینکه اگر موتور تک فاز باشه روش محاسبه فرق میکنه؟
سلام پلاک موتور و بررسی کنید. محاسبه جریان موتور تشکیل میشه از توان،ولتاژ،دور نامی موتور،کوسینوس فی موتور و خروجی نهایی میشه جریان موتور هر کدوم از این اطلاعات و ندارین باید عددی جایگزینش کنید.
سلام
الکتر موتور۴۰اسب ۳۰کیلووات۱۴۰۰ دور دارم میتوانم با بزرگ کردن پولی پمپ دوروارتفاع را بالا ببرم
اگه میشه راهنمایی کن تاحدممکن ارتفاع را بالا ببرم البته باخروجی۳اینچ۹
سلام به همه ی دوستان
سوالی دارم به این مضمون که وقتی میخواستم یک الکتروموتور گیربکس رو از یه کارخانه چینی خرید کنم احساس کردم گشتاور کمتری رو از ما محاسبه میکنه ،
به همین دلیل ازش خواستم فرمول محاسباتیش رو بایت گشتاور بهم بگه ، اون در پاسخ همین فرمول ۹۵۵۰ رو گفت اما در انتها اونو در عدد ۰.۴ ضرب کرد
میخواستم بدونم دلیل این ضرب نتیجه در ۰.۴ چی بوده
البته این نکته رو هم بگم که گیربکس در خواستی من ۳۰۰ به ۱ بود ، شاید تین نکته بتونه کمکی کنه.
ممنون میشم اگه کسی بتونه راهنمایی کنه
سلام خدمت شما دوست عزیز
تلفات گیربکس ه
سلام و عرض ادب . بنده برای ساخت یک دستگاه فنس باف دستی نیاز به یه الکتروموتور با قدرت متوسط دارم که معمولا ۵ اسب هست .باید در این دستگاه سرعت چرخش قالب رو در حد ۱۰۰ تا ۱۵۰ دور در دقیقه تنظیم کرد جوری که از قدرت الکتروموتور کاسته نشود و از طرفی نیاز هست که بعد از چند دور چرخش محور قطع و دوباره بصورت دستی و با اشاره کاربر همین چرخه تکرار شود .تعداد دور در هر فاز عملیاتی از مثلا ۱۰ تا ۲۰ دور متغیر هست. لطفا راهنمایی بفرمایید از چه روشی و با چه امکاناتی این کار رو انجام بدم آیا نیاز به گیربکس دارم یا با اینورتر سرعت تنظیم بشود؟ هدف کم نشدن قدرت الکتروموتور علیرغم کم شدن دور موتور هست. متشکرم پیشاپیش
سلام برای تنظیم دور الکتروموتور و افزایش؛ کاهش دور موتور در طول فرایند حتما نیاز به اینورتر دارید.
در مورد کاهش دور ماشین تا ۱۰۰ دور در دقیقه قطعا نیاز به گیربکس دارید.
کار اصلی گیربکس کاهش دور و افزایش توان است.
شما باید با گیربکس دور موتور را تا بازه مورد نظر کاهش دهید مثلا ۱۵۰ دور در دقیقه در مرحله بعدی با کمک اینورتر میتوانید بین ۲۰۰ دور تا ۰ دور در دقیقه دور ماشین مورد نظر را کنترل نمایید.
اینورتر های جدید میتوانند در ۱ دور در دقیقه هم تمام توان موتور را حفظ نمایند اما نکته این است که ایا موتور مورد نظر شما در توان کامل قدرت به حرکت دراوردن ماشین شما را دارد؟
مثلا در دستگاه اکسترودر پلاستیک یک موتور ۳۰ کیلووات میبینید با یک گیربکس ۱ به ۱۵ در واقع دور موتور تقسیم بر ۱۵ میشود و توان موتور ضربدر ۱۵ میشود البته درصدی هم تلفات گیربکس میشود.
هدف اصلی استفاده از گیربکس افزایش توان و کاهش دور است
در این دستگاه اگر از گیربکس استفاده نشود یک موتور ۴۵۰ کیلووات نیاز است برای به حرکت دراوردن اکسترودر.
موفق و پیروز باشید.
با سلام مجدد
آیا وب سایت هایی در اختیار دارید که :
مشخصات ساخت ماشین های الکتریکی ( موتور و ژنراتور ) در انواع آن ( DC یا AC ) و شار محوری و شار شعاعی را بصورت PDF داشته باشد؟
منظور از مشخصات ساخت : ابعاد شیار، تعداد شیار، تعداد قطب، ابعاد روتور و استاتور، تعداد دورهای سیم پیچی و…
لینک های وب سایت رو اگر به اشتراک بگذارید ممنون میشوم
با تشکر
با سلام به شما مهندس گرامی
سئوالی داشتم در خصوص نحوه محاسبه دوره الکتریکی !
میخواستم بدونم که یک دوره الکتریکی برای موتورهای شار محوری از چه رابطه ای بدست می آید؟
با تشکر
سلام دقیقا متوجه سوال شما نشدم
با سلام و عرض ادب
من چند تا سوال در مورد گشتاور و سرعت دارم, ۱-عددی که معمولا روی پلاک موتورها یا در دیتا شیت اونها برای گشتاور نوشته میشه منظور کدام گشتاور هست؟ چون ما یک گشتاور پیک داریم (stall torque) و یک گشتاور نامی. ۲-گشتاوری که از فرمول توان ضرب در ۹۵۵۰ تقسیم بر سرعت به دست میاد منظور کدوم گشتاوره ؟مثلا در موتور ۷.۵کیلووات با دور ۳۰۰۰rpm طبق فرمول گشتاور به دست میاد ۲۳.۸ نیوتن متر حالا این گشتاور یعنی چی؟ یعتی این موتور با یک پولی به شعاع یک متری میتونه یک وزنه ۲.۳۸کیلوگرمی رو با سرعت ۳۰۰۰ rpm بالا بکشه؟ ۳- من چطور میتونم گشتاور یک موتور رو در سرعت های متفاوت محاسبه کنم
سلام خدمت شما دوست عزیز.
مورد یک: در پلاک موتور یا خروجی محاسبه ذکر شده گشتاور نامی مد نظر است و بسته به نوع تیپ موتور و شرکت سازنده گشتاور پیک متفاوت است که برند های معتبر در راهنمای انتخاب موتور این عدد یا درصد نامی این عدد را ذکر میکنند
مثلا مینوسیند ۱۶۰ درصد گشتاور پیک.
مورد دو: گشتاوری که از فرمول فوق به دست میارید گشتاور نامی موتور است، بحث پولی در سر موتور و در انتهای کار عدد محاسبه را عوض میکند.یکی از نکات محاسبه فوق دور خروجی بود پولی یا فولی مورد نظر عدد دور را عوض میکند.
به طور مثال :یک موتور ده اسب یا ۷.۵ کیلووات (۷.۵ ضربدر ۹۵۵۰ تقسیم بر ۳۰۰۰ دور بر دقیقه مساوی است با :۲۳.۸ نیوتن متر در خروجی شافت) حال همین موتور روی دستگاهی نصب میشود که فولی سر موتور را ۱۰ و فولی سر سبد یا همزن یا هر چیز دیگری را ۳۰ انتخاب میکنند محایبه فوق به محاسبه بالا اضافه میشود (۲۳.۸ ضربدر ۳۰ تقسیم بر ۱۰ مساوی است با : ۷۱.۴ نیوتن متر) میبینید که توان سه برابر شد و دور نهایی هم سه برابر کاهش یافت طبق محاسبه (۳۰۰۰ دور ضربدر ۱۰ تقسیم بر ۳۰ مساوی ۱۰۰۰ دور بر دقیقه).
مورد سه : گشتاور یک موتور سه هزار دور ۷.۵ کیلووات ۲۳.۸ نیوتن متر است اگر از اینورتر های وکتور کنترل استفاده کنید تقریبا در تمامی دور ها این گشتاور با تلرانس ۲۰ درصد ثابت است.
در خدمت شما هستم.
سلام با تشگر از پاسحگویی سریع شما
منظور من در مورد دوم متوجه شدن مفهوم گشتاور در الکتروموتور بود, من متوجه تغییر سرعت با عوض شدن شعاع فولی هستم بگذارید اینطور سوالم رو بپرسم در همون موتور ۷.۵ کیلووات با فولی به شعاع ۱ متر با صرف نظر کردن از وزن فولی (شعاع فولی همون بازوی گشتاور هست دیگه) این موتور قادر هست وزنه ۲۳.۸ نیوتنی را با سرعت ۳۰۰۰rpm بالا بکشه؟
نکته : هرچقدر فولی سر موتور شما بزرگتر شود از قدرت کاسته میشود و به سرعت اضافه میشود.
من گفتم که متوجه تغییر سرعت با عوض شدن شعاع فولی هستم من با این سوال میخواستم به موضوع دیگری برسم ببینید در منحنی “سرعت-گشتاور” اکثر موتورها در ابتدا نمودار صعودی هست یعنی با افزایش سرعت, مقدار گشتاور هم زیاد میشود تا اینکه در یک نقطه نمودار به ماکزیمم مقدار میرسد, یعنی در یک سرعت مشخص به ماکزیمم گشتاور میرسم بعد ار این نقطه نمودار نزولی میشود یعنی با افزایش سرعت, گشتاور کم میشود حالا سوال من در مورد قسمت ابتدایی نمودار یعنی قسمت صعودی نمودار هست مثلا فرض کنید موتور ما در یک بالابر مشغول به کار هست طبق توضیحات بالا در ابتدای حرکت موتور, ما هر چه وزنه را سنگین تر کنیم(یعنی گشتاور را افزایش میدهیم) سرعت موتور افزایش میابد! سوال من همینه, همچین چیزی چطور در عمل ممکن هست؟ یعنی این بالابر که مثلا وزنه ۱۰ کیلوگرمی رو با سرعت ۱۰۰rpm بالا میکشه چطور وزنه ۱۲ کیلوگرمی رو با سرعت ۱۵۰rpm بالا میکشه؟اعداد این مثال فرضی هستن
موتور مورد مثال شما به صورت کنتاکتوری راه اندازی میشود یا با اینورتر؟
من فقط مثال زدم اطلاعی در این مورد ندارم من میخوام بدونم این نمودارها چطور در عمل توضیح داده میشن.
ضمن عرض سلام حضور آقای مهندس رجبی
من میخواستم از دو دستگاه الکتروموتور جایگزین موتورهای دیزلی به عنوان سیستم تحرک یک کشتی تفریحی استفاده کنم، بدین معنی که یکدستگاه دیزل جنراتور ۱۵۰ کاوا کار تامین برق کشتی رو به عهده داشته باشه و با دو دستگاه الکتروموتور حدود ۴۰ اسب بخار این کشتی رو روی آب به حرکت در بیارم، البته تو این مورد نظرم این هست که از اینورتورهای فرکانسی برای استفاده از الکتروموتورها از دور پایین یعنی از ۵۰ دور در دقیقه تا ماکزیمم دور مورد نظرم که حدود ۱۰۰۰ دور در دقیقه خواهد بود استفاده کنم، لازم هست عرض کنم که حدود دور متوسط مورد نیاز که در بیشتر موارد از اون استفاده خواهد شد حدود ۴۰۰ تا ۷۰۰دور در دقیقه هستش، البته در زمان شروع به حرکت و مواقع ورود به بندر و خروج از بندر بیشتر دور بین ۴۰ تا ۱۰۰ دور در دقیقه برای مدت حدود ۱۵ دقیقه استفاده میشه و بعد از اون کشتی با این دور حرکت خواهد کرد.
حال میخواستم نظر شما رو در این زمینه جویا بشم و اگر پیشنهاد خاصی در ارتباط با محصولات خودتون میتونید بدید که هم بحث کیفیت و هم بحث هزینه و قیمت و همچنین کارآیی رو برام لحاظ کرده باشید ممنون و سپاسگزار خواهم بود
عالیه لطفا با شماره تلفن ۰۹۱۲۲۶۵۹۱۵۴ تماس حاصل فرمایید.
عالیه و این کار امکان پذیر است جهت توضیح اطلاعات کامل تر با شماره تلفن ۰۹۱۲۲۶۵۹۱۵۴ تماس حاصل فرمایید.
با سلام – بنده برای ساخت یک دستگاه وینچ کشنده که حداکثر نیروی لیفت وارد بر آن ۲۰۰۰ کیلوگرم می باشد، به یک الکتروموتور ۳ فاز ( از پیشنهاد بهتر استقبال می کنم) با توان تقریبا ۵ کیلو وات و گیر بکس حلزونی مستقیم ( بررسی هایم نشان داده که امکان اتصال گیربکس به موتور بدون پولی یا زنجیر و به طور مستقیم بازدهی بسیار بهتری خواهد داشت) نیاز دارم. البته برنامه ای نیز برای هوشمند سازی کل سیستم دارم به این صورت که اگر نیروی کشش طناب به بیش از ۲۰۰۰ کیلوگرم رسید و به مدت بیش از ۲۵ ثانیه بر طناب به طور مداوم اعمال گردید، آنگاه سیستم به طور خودکار شروع به جمع کردن طناب نماید. طول طناب ۳۰۰ متر است و سرعت باز شدن طناب را از روی درام وینچ ۱۰ دور در دقیقه در نظر گرفته ام. خواهشمندم در این زمینه راهنمائی بفرمائید و اگر شرکت شما امکان تامین نیاز بنده را دارد بفرمائید تا خدمت برسم.
سلام به نظر من باید از موتور ۷.۵ کیلووات استفاده شود با گیربکس با نسبت ۱ به ۲۵ و حتما از اینورتر باید استفاده شود.
در مورد اتصال موتور به گیربکس بله درست میفرمایید هرچه اتصال ها کمتر شود نرخ تلفات کاهش پیدا میکند.
در مورد هوشمند سازی سیستم مورد نظر هم تیم مهندسی الکترومارکت در خدمت شما هست.
با تشکر از بازدید شما.
با سلام
میشه رابطه ای بین امپر مصرفی و گشتاور خروجی موتور سه فاز ذکر کنید
سپاس
سلام خدمت شما دوست عزیز
این سوال در عین سادگی سوال سختی است اگر سرچ کنید میبینید که پاسخ درستی به این سوال حتی در منابع خارجی هم پیدا نمیکنید ، این سوال همیشه برای من هم سوال بوده است و همیشه از بزرگانی پرسیده ام ،نمونه چالشی که همیشه در این رابطه مطرح میشود:چرا یک موتور ۱۵ کیلووات ۷۵۰ دور جریان بالاتری از یک موتور ۱۵ کیلووات ۳۰۰۰ دور دارد ؟
وقتی این سوال رو از بسیاری از اساتید میپرسید با کمال تعجب میگن نه فرقی نمیکنه شما اشتباه میکنید …ولی وقتی به حسب تجربه سر ۱۰۰ یا حتی ۱۰۰۰ تا موتور با دور های مختلف رفته باشید متوجه میشید که فرق میکنه و جالب تر اینکه حتی نمیشه برای این عدد نسبت خاصی هم در اورد…
نکته:
بیایین محاسبه کنیم گشتاور ۴ موتور ۱۵ کیلووات با ۴ دور متفاوت رو با هم
موتور ۱۵ کیلووات ۳۰۰۰ دور: ۱۵kw×۹۵۵۰÷۳۰۰۰rpm=47.75 nm
موتور ۱۵ کیلووات ۱۵۰۰ دور: ۱۵kw×۹۵۵۰÷۱۵۰۰rpm=95.5 nm
موتور ۱۵ کیلووات ۹۰۰ دور: ۱۵kw×۹۵۵۰÷۹۰۰rpm=159.16 nm
موتور ۱۵ کیلووات ۷۵۰ دور: ۱۵kw×۹۵۵۰÷۷۵۰rpm=191 nm
همونطور که مشاهده میکنید موتور ۱۵ کیلووات ۷۵۰ دور نیوتن متر و گشتاور تولیدیش ۴ برابر بیشتر از یک موتور ۳۰۰۰ دور است و در کمال تعجب شاید ۱۰ درصد جریان بیشتری مصرف کند و دلیل این نکته این است که شما دور را فدای گشتاور و گشتاور را فدای دور میکنید یعنی اگر بخواهید گشتاور بالا و همچنین دور بالا را همزمان داشته باشید حتما باید از موتوری با کیلووات یا توان بیشتری استفاده کنید.
در پروژه هایی دیده شده که مشتری بیان میکنه من یک موتور ۴ کیلووات ۱۴۵۰ دور داشتم و چون میخواستم دور ماشین رو به سطح بالاتری ببرم اومدم موتور ۳۰۰۰ دور ۷.۵ کیلووات خریداری کردم سوال میشه حالا چرا ۷.۵ کیلووات خریدی میگن چون میدونستم موتور ۳۰۰۰ درو گشتاور کمتری اعمال میکنه ،ولی در نهایت موتور ۷.۵ کیلووات ۳۰۰۰ دور نمیتونه ماشین رو راه اندازی کنه و ماشین ساز با تعجب میپرسه موتور قبلی ۴ کیلووات بوده چرا این موتور با ۲ رنج توان بیشتر نمیتونه راه اندازی کنه سیستم رو …
و در جواب :ماشین ساز محترم میدونسته که وقتی دور الکتروموتور میره بالا گشتاور تولیدی موتور کاسته میشه ولی متاسفانه از محاسبه استفاده نکردن، حالا در محاسبه زیر میتونید گشتاور این دو موتور ببینید:
موتور ۴ کیلووات ۱۴۵۰ دور: ۴kw×۹۵۵۰÷۱۴۵۰rpm=26.34 nm
موتور ۷.۵ کیلووات ۳۰۰۰ دور: ۷.۵kw×۹۵۵۰÷۳۰۰۰rpm=23.87 nm
میبینید که با توجه به افزایش ۲ رنج قدرت موتور ولی باز هم گشتاور تولیدی هنوز به سطح موتور ۴ کیلووات نرسیده .
و اما جواب سوال شما دوست عزیز:
رابطه خاصی برای گشتاور و جریان پیدا نکردم ولی میدونم در ۲ موتور با توان یکسان و گشتاور متفاوت موتوری که گشتاور بالاتری دارد جریانی به نسبت بالاتری را مصرف میکند در حد ۵ درصد و عکس این موضوع هم صدق میکند.
اگر دوستان در این رابطه نظری دارند بفرمایید استفاده میکنیم.با تشکر .
الکترومارکت را به اشتراک بگذارید.
سلام.
به صفحه۲۵۲ تا ۲۶۳ کتاب p.c.sen مراجعه بکنید جواب ارتباط بین جریان وگشتاور رو بدست میارید.
اگر مدار معادل موتور القایی ارجاع شده به سمت استاتور رو رسم کنیم ،این چنین میشه که:
r1:مقاومت هرفاز سیم پیچ ستاتور
jx1:راکتانس هر فاز سیم پیچ استاتور
jxm:راکتانس مغناطیس کنندگی
Rc: مقاومت اهمی معادل تلفات هسته هر فاز استاتور
‘E2:ولتاژ القائ شده در هر فاز روتور در حالت مدار باز ،ارجاع شده به سمت استاتور E1=E’2
‘r2:مقاومت اهمی هر فاز رتور ارجاع شده به سمت استاتور
‘x2:راکتانس سلفی هر فاز رتور ارجاع شده به سمت استاتور
‘I2:جریان عبوری از هرفاز رتور ارجاع شده به سمت استاتور
I1:جریان عبوری از هر فاز استاتور
اگر تلفات هسته رو در مدار ثابت در نظر بگیریم لذا در مدار معادل از Rc صرفنظر می شود.
سپس مدار معادل تونن هر فاز را بدست می آوریم صفحه ۲۵۷ کتاب
گشتاور موتور القایی با جریان رتور و ضریب قدرت مدار رتور و ولتاژ القایی رابطه مستقیم دارد.(در واقع لغزش)
بنابراین رابطه بین گشتاور و جریان:
جریان روتور ارجاع شده به سمت استاتور را می توان از رابطه زیر بدست آورد:
((I2=I1*(jXm/(r2/s)+X2+Xm بدست آورد.(r2وX2وI2 علامت پریم دارند)
البته خیلی خلاصه نویسی شد
سلام وقتتون بخیر
گشتاور در کدام از این موتورها زیاد است ؟
۱. موتور سری
۲. موتور شنت
۳. موتور کمپوند اضافی
۴. موتور تحریک مستقل