خودروهای الکتریکی
این جلسه قصد دارم به برخی از مسائل مربوط به طراحی درایو در زمینه برق خودرو (خودروهای الکتریکی) بپردازم.
مسائل مربوط به طراحی درایو
- مقایسه درایوهای مختلف برای برنامه های کاربردی خودروهای الکتریکی
- طراحی ماشین های الکتریکی – دیدگاه ها
- علم ماشین آلات
- طراحی ماشین های القایی
- طراحی ماشین آلات BLDC
- طراحی ماشین آلات SRM
- بهینه سازی
- گرایشات و روندهایی که اخیرا در طراحی استفاده شده
بیایید این جلسه را با مقدمه ای جامع در مورد درایوهای استفاده شده در صنعت شروع کنیم، درایوهایی بخوبی درایوهای برنامه های کاربردی خودروهای الکتریکی…
درایوهای خودروهای الکتریکی در مقابل درایوهای صنعتی

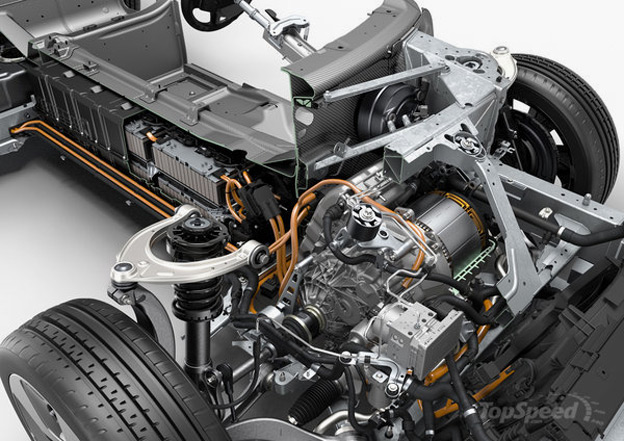
در خودروهای الکتریکی، فقط موتور کشش است که گشتاور را به چرخ ها هدایت می کند. بنابراین عملکرد خودرو به طور کامل با سرعت گشتاور یا مشخصه سرعت قدرت موتور کشش تعیین می شود.
یک وسیله نقلیه، برای تامین نیاز عملیاتی خود، مانند شتاب اولیه و درجه توانایی با قدرت حداقل ذکر شده در بالا، نیاز به این دارد که کاملا در قدرت ثابتی مورد بهره برداری قرار گیرد. با این حال، داشتن عملکردی که قدرت در آن کاملا ثابت باشد، برای هر وسیله نقلیه ای ممکن نیست.
یک وسیله نقلیه، برای تامین نیاز عملیاتی خود، مانند شتاب اولیه و درجه توانایی با قدرت حداقل ذکر شده در بالا، نیاز به این دارد که کاملا در قدرت ثابتی مورد بهره برداری قرار گیرد. با این حال، داشتن عملکردی که قدرت در آن کاملا ثابت باشد، برای هر وسیله نقلیه ای ممکن نیست.
می توان مشاهده کرد که انتظار می رود درایو (اینورتر) موتور خودروهای الکتریکی قادر به ارائه گشتاور بالا در سرعت پایین برای شروع و شتاب باشند، و نیز یک قدرت بالا در سرعت بالا برای کروز.
در همین زمان، محدوده سرعت تحت قدرت ثابت در گسترده ترین مقدار ممکنه، مورد نظر می باشد. در حالت ایده آل، از بین بردن منطقه گشتاورثابت، حداقل رتبه قدرت موتور را ارائه می دهد، اما این به لحاظ فیزیکی تحقق یافتنی نیست.
در حالت عملکرد نرمال، یک درایو موتور الکتریکی معمولی که برای کاربردهای صنعتی طراحی شده است، می تواند گشتاور مجاز ثابتی را تا محدوده سرعت پایه یا مجاز ارائه دهد. در این سرعت، موتور به بالاترین حد مجاز قدرت خود می رسد. عملکرد موتور فراتر از سرعت پایه تا سرعت حداکثر به منطقه قدرت ثابت خود محدود شده است.
گستره ی بهره داری در قدرت ثابت در درجه اول به نوع آن موتور خاص و استراتژی کنترل آن بستگی دارد.
حداکثر گشتاور موجود در حالت طبیعی عملکرد موتور، بطور معکوس با افزایش مربع سرعت کاهش می یابد. اگرچه گشتاور موتور در حالت طبیعی، بطور معکوس، با افزایش مربع سرعت، کاهش می یابد، اما برای برخی از موتورها با سرعت بسیار بالا، حالت طبیعی عملکرد موتور، بخش قابل ملاحظه ای از کل نمودار قدرت- سرعت را تشکیل می دهد.
گنجاندن این حالت طبیعی برای درایوهای موتور این چنینی می تواند موجب کاهش توان مصرفی کل شود.
نتیجه گیری
نتیجه گیری های برگرفته از مقایسه های بالا عبارتند از:
1- هرچه نسبت منطقه قدرت ثابت افزایش یابد، قدرت مورد نیاز (توان مجاز) برای عملکرد شتاب (زمان شتاب و فاصله شتاب) کاهش می یابد.
2- در مقابل، هرچه نسبت منطقه قدرت ثابت افزایش یابد، گشتاور مورد نیاز (گشتاور مجاز) برای شتاب افزایش می یابد. این پیامدها در موتوری با سایز و حجم بزرگتر رخ می دهد.
3- هرچه نسبت منطقه قدرت ثابت به کل منطقه (یعنی سطحی از نمودار که قدرت در آن ثابت است) افزایش یابد، عملکرد عبوری (زمان عبوری و فاصله عبوری) بطور قابل توجهی دچار مشکل می شود.
4- حداکثر سرعت یک موتور، می تواند اثر قابل بیانی بر گشتاور مورد نیاز موتور بگذارد. موتورهای سرعت پایین، در محدوده سرعت قدرتی که بطور ثابت تمدید شده و به پیش می رود، گشتاور شفت مجاز بالاتری دارند. در نتیجه، به آهن و مس بیشتری برای حمایت از این شار و گشتاور بالاتر، نیاز خواهد بود.
5- هرچه قدرت موتور کاهش یابد (به دلیل گسترش یافتن محدوده عملکرد قدرت ثابت) گشتاور مورد نیاز افزایش می یابد. بنابراین، اگرچه مبدل توان مورد نیاز، با افزایش دامنه توان ثابت، کاهش یافته است، اما سایز و حجم موتور و هزینه های آن افزایش خواهد یافت.
6- افزایش حداکثر سرعت موتور می تواند، با فراهم کردن امکان افزایش گشتاور شفت برای دنده ها، باعث کاهش سایز موتور شود. با این حال، بدون شک نمی تواند حداکثر سرعت موتور را، بدون متحمل شدن هزینه بیشتر و الزامات انتقال، افزایش داد.
الزامات خودروهای الکتریکی در درایوهای موتور الکتریکی
- قدرت لحظه ای بالا و چگالی توان بالا.
- گشتاور بالا در سرعت های پایین برای زمان شروع و روند رو به بالا، همانند قدرت بالا در سرعت بالا برای کروز.
- محدوده سرعت بسیار گسترده، شامل گشتاور ثابت و محدوده قدرت ثابت.
- گشتاور با پاسخ سریع
- بازده بالا در محدوده گسترده ای از سرعت و گشتاور
- راندمان بالا برای ترمز احیا کننده.
- قابلیت اطمینان و استحکام بالا در شرایط مختلف عملکرد خودرو.
- کوچک سازی، کاهش وزن، و ممان اینرسی کمتر.
- تحمل خطا
- هزینه معقول
- فرونشاندن تداخل الکترومغناطیسی (EMI) در موتور کنترلرها.
ملاحظات اصلی در طراحی
- نوع ساختار قاب
- تهویه
- بلبرینگ و شفت
- ابعاد هسته مغناطیسی و سیم پیچ
جزئیات طراحی مورد نیاز:
- ابعاد اصلی استاتور.
- جزئیات سیم پیچی استاتور.
- جزئیات طراحی روتور و سیم پیچ آن
- ویژگی های عملکردی.
مشخصات فنی:
- تعداد فاز
- فرکانس
- خروجی مجاز بر حسب کیلو وات
- نوع وظیفه
- اتصالات ولتاژ
- افزایش دما
- سرعت
- گشتاور خروجی
- گشتاور راه اندازی
- میزان جریان در شروع روند
- ضریب توان
- بهره وری / زیان
- کلاس عایق
مطالب الکترومارکت را در کانال تلگرام الکترومارکت دنبال کنید.
منابع:
- Electrical Machine Design – A.K.Sawhney
- Selection of Electric Motor Drives for Electric Vehicles – X. D. Xue, K. W. E. Cheng and N. C. Cheung
- Inputs from Google and Wikipedia
خوب است
مثل همیشه بی نظیر
ممنون دوست عزیز.