Encoder
انکودر
در طراحی دیجیتال، رمزگذار (به انگلیسی: encoder) مداری است که ۲n خط ورودی و n خط خروجی دارد. مدار انکودر عکس عمل دیکودر را انجام میدهد. مدار انکودر، سیگنالهای باینریهای چندگانه ورودی را به یک عدد کوچکتر فشرده میکند. در هر لحظه تنها یکی از ورودیها میتواند مقدار «1» داشته باشد و بقیه ورویها باید در حالت «0» باشند. در صورتیکه چند ورودی به صورت همزمان در حالت «1» قرار داشته باشند، آن ورودی که اولویت بالاتری نسبت به بقیه دارد در مدار اثر میگذارد. به چنین مداری، انکودر با اولیت گفته میشود.
تعریفی دیگر از انکودر
انکودر یا کد گذارها در دو نوع افزایشی (Incremental) و مطلق (Absolute) موجود هستند که در اتوماسیون صنعتی بویژه در تعیین موقعیت سروو موتورها مورد استفاده قرار می گیرند.
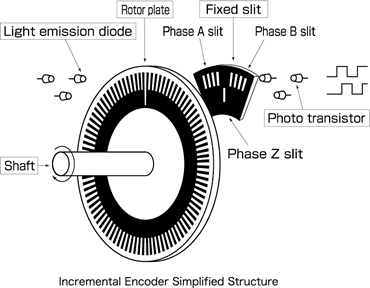
اصطلاح رمزگذار (انکودر) به المانی اطلاق می گردد که خروجی دیجیتالی در اثر جابه جایی زاویه ای یا خطی تولید کند. رمزگذار، افزایش تغییرات جابجایی زاویه ای یا خطی را نسبت به نقطه مبنا آشکار می سازد حال آنکه یک رمزگذار محض، محل واقعی زاویه ای یا خطی را خواهد داد. یک اشعه نور، از یک دیود گسیلنده نور (led) ، از شیارهای روی دیسک عبور کرده و توسط یک حسگر نوری مثل دیود یا ترانزیستور نوری، آشکار می شود. هنگامی که دیسک حرکت می کند اشعه نور بطور متناوب قطع و ارسال می شود و بنابراین یک خروجی پالس از حسگر نوری تولید خواهد شد تعداد پالسها متناسب با زاویه ای است که دیسک گردش کرده است، دقت با تعداد شیارهای روی دیسک نسبت دارد. مثلا دیسکی با ۶۰ شیار ، از آنجائیکه هر دور ۳۶۰ درجه است حرکت از یک شیار به شیار دیگر ۶ درجه می باشد.همچنین با استفاده از شیارهای فرعی می توان برای هر دور یک هزار شیار داشت و در نتیجه دقت بالاتری را بدست آورد.
در سیستم های صنعتی و بالخصص اتوماسیون صنعتی رمزگذار مطلق با رمزگذار افزایشی تفاوت هائی دارند که دارای یک الگوی سوراخهای هستند که محل هر زاویه خاص را تعریف می کند مثلا اگر انکدر افزایشی از سه مجموعه سوراخ استفاده کند و می تواند یک خروجی ۳ بیتی تولید کند.
رمزگذارهایانکدر کاربردی دارای ۱۰ تا ۱۲ شیار می باشند تعداد بیتهای خروجی دودویی حاصل برابر با تعدا شیارها می باشد بنابران با سه شیار سه بیت خواهیم داشت و در نتیجه تعدا محلهایی که می توانند آشکار شوند ۲۳=۸ خواهد بود، یعنی دقتی برابر با۳۶۰/۸=۴۵ با ۱۰ شیار دارای بیت هستیم و تعداد محلهایی که میتواند آشکار شود ۲۱۰=۱۰۲۴ و دقت زاویه ای ۳۶۰/۱۰۲۴=۰/۳۵ خواهد بود.
همانطور که گفتیم انکودر یک ماشین الکتریکی برای نشان دادن یا اشاره کردن به وضع یا تامین موقعیت در اتوماسیون صنعتی است.
اشاره شد که نوعی از انکودر از سنسورهای نوری برای تولید یک سری پالسها استفاده می کنند.
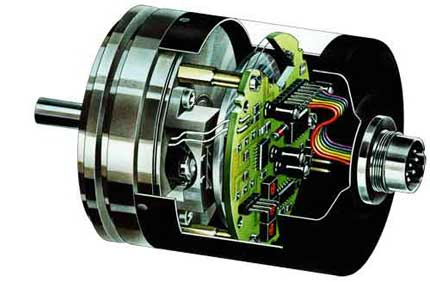
در این نوع انکدرها یک دیسک بسیار نازک و یک دیود ساتع کننده نور وجود دارد که وقتی دستگاه روشن است، نور ساتع شده از دیود بر مرکز دیسک شیشه ای متمرکز می شود به این صورت که نور یک ترانزیستور نوری را که روی یکی دیگر از خطوط دیسک شیشه ای قرار دارد را فعال می کند که این نور می تواند از دیود نمایان شود. دیسک روی یک موتور شفت نصب می شود یا راه دیگری که برای حس کرد موقعیت وجود دارد آن است که وقتی شفت می چرخد دیسک را هم بچرخاند وقتی خطوط دیسک روشن هستند که نور LED روی فتو ترانزیستور متمرکزباشد در این حالت بعد از مدت زمانی فتوترانزیستور به اشباع می رود و یک موج الکتریکی به صورت مربعی ایجاد خواهد کرد.
انکودر چرخشی افزاینده
INCRMENTAL ROTARY ENCODER
یک انکودر با یک مجموعه از پالسها نمی تواند مفید باشد به دلیل اینکه قادر به نمایان کردن جهت چرخش نخواهد بود.
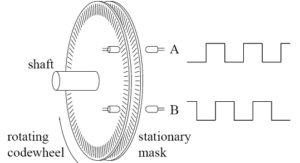
انکودرهای چرخشی باید دارای مجموعه دومی از پالسها باشند که این مجموعه (خارج) جدا از مجموعه پالسی اولیه باشد و یک پالس واحد آن نشان دهنده زمان چرخش یک دوره کامل دیسک باشد.
شکل بالا نشان می دهد یک نمونه از دو مجموعه پالس را که آنها خارج از مرحله می باشند.
از آنجائیکه این دو مجموعه پالسی مستقل از یک دیگرند این امر مشکل ساز خواهد بود برای تعیین جهت در حال چرخش شفت وقتی که نوبت فازی بین دو مجموعه اول و دوم قرار می گیرد.
مجموعه پالس اول معروف به A و مجموعه دوم به B می باشد یک منبع نور سومی هم به کار می رود برای نمایان کردن وضعیت یک پالس فرد که تولید می شود در اثر رولیشن (چرخش).
شکل بالا نمونه هائی از مجموعه پالس B,A و پالس فرمان را نشان می دهد اگر مجموعه پالس A قبل از پالس B وجود داشته باشد شفت در جهت عقربه های ساعت می چرخد ولی اگر پالس B زودتر از پالس A وجود داشته باشد شفت در جهت عکس عقربه های ساعت می چرخد و پالس C وجود پیدا می کند بخاطر چرخش به این پالس فرمان می گویند که استفاده می شود در شمارش تعداد دورهای چرخش شفت متصل به انکودر.
چنانچه از انکودر افزایشی مشروط به یکی از پالسها استفاده شود باید از home switche همراه با آن استفاده کرد برای اطمینان از اینکه انکودر واقعا با نقطه شروع به کار فیکس (تنظیم) باشد.
انکودرهای چرخشی اولیه از فلز (منظور دیسک آنهاست) ساخته می شدندکه درصنعت اتوماسیون مفید نبودند و نتیجه حاصله از آنها از دقت کمی برخوردار بود انکودرهای چرخشی امروزی از شیشه های شفاف که دارای قسمت های تیره چاپ شده هستند که این قسمت ها فرم میله ای دارند.
در بیشتر انکودرهای چرخشی قسمتهای تیره چاپی راه نور را سد می کنند و بقیه دیسک شیشه ای که شفاف است به نور اجازه عبور می دهد.
این نوع جدید هم یک سلسله بالس همانند سیستم قدیمی انکودرهای چرخشی فلزی که دارای سوراخ به جای قسمتهای تیره بودند، تولید می کند. این نوع انکودرهای شیشه ای دارای قسمتهائی از ۱۰۰ تا ۶۰۰۰ می باشد. این بدان معنی است که انکودر ۱۰۰ قسمتی برای هر ۶/۳ درجه یک قسمت تیره دارد و انکودر ۶۰۰۰ قسمتی برای هر ۰۶/۰ درجه یک قسمت تیره خواهد داشت.
شفت انکودر برای چرخیدن باید به شفت موتور متصل شده باشد این کار توسط یک پیچ گرد یا دنده تبدیلی انجام می شود و نتیجه این کار تولید یک حرکت طولی می باشد.
وجود ۱۰۰ سوراخ مته کاری شده روی انکودرهای قدیمی مشکل ایجاد میکرد برای بدست آوردن بیشترین دقت ( یا راندمان) چون دیسک نمیتواند در این صورت میزان باثبات و مناسبی از نیروی چرخشی را بگیرد یا بدست آورد. به این دلیل در انکودرهای چرخش جدید از شیشه گردنده با قسمت های چاپی استفاده می شود. در این شیشه های چاپی برای بوجود آوردن قسمتهای تیره پی در پی از مواد شیمیائی استفاده می شود.
مجموعه پالس دوم در این نوع از انکودرها توسعه پیدا کرده است توسط یک منبع نور دوم و دریافت کننده نور دوم در گوشه ای متمایز و جدا از مجموعه اول. در این صورت مجموعه پال دوم بایستی به اندازه تفکیک زاویه دو منبع از سطح سوراخ کاری شده دیسک شیفت پیدا کند از مجموعه اول.
به این ترتیب انکودر چرخشی فرصت می یابد برای نمایان کردن اطلاعات میزان افزایش و تغیر جهت روی یک سری از میله های چاپی تیره در دیسک، و مجموعه پالس دوم برای تعیین جهت چرخش در انکودرهای چرخشی مورد استفاده قرار می گیرد.
شکل زیر یک نمونه از شیشه های چاپی انکودرچرخشی و دیاگرام منبع نور و دریافت کننده آن را نشان می دهد و هم چنین شما می توانید دیسک شیشه ای را با خطوط بسیار نازک که روی آن کشیده شده است را مشاهده کنید. خطوط سیاه قسمت های تیره هستند که جلوی نور را سد می کنند. دیاگرام شکل زیر فقط یک منبع نور و دریافت کننده آن را نشان می دهد منبع نور دوم و دریافت کننده آن نیز قرار می گیرند روی انکودر به گونه ای که تولید می کند مجموعه پالس مبداء را.
انکودرهای مطلق
Absolute Encoders
یک اشکال بزرگ انکودرهای افزایشی این هست که شمارش پالسهای آن در یک میانگیر یا اکسترنال کانتر (Caunter Eaternal) ذخیره می شود. اگر برق قطع شود و یا به هر حال اختلال پیدا کند شمارش گم خواهد شد ( نقطه صفر برای دستگاه به هنگام راه اندازی مجدد کم یا تعریف نشده است) این بدان معناست که چنانچه قدرت را از یک ماشین الکتریکی با انکودری که دارای چرخاننده الکتریکی است بگیریم حال به هر دلیلی که ممکن است به خاطر تعمیرات یا هر شب بعد از ساعات کاری باشد دیگر انکودر موقعیت صحیح را نخواهد دانست.
انکودر بایستی به کار رود به صورت یک کلید بازتاب خانه برای آشکار ساختن موقعیت درست ماشین . انکودر افزایشی به کار می رود بهصورت یک homing routine برای افزایش نیروی موتور تا وقتی که خانه لیمیت سوئیچ فعال باشد و چنانچه خانه لیمیت سوئیچ فعال باشد میانگیر و کانتر روی صفر تنظیم هستند و سیستم می داند که روی نقطه ثابت قرار دارد. شکل زیر یک سلسله پالس را برای انکودر افزایش نشان می دهد.
گروه مهندسی الکترومارکت در خدمت شما است.
برای حل این مشکل از انکودرهای مطلق استفاده می شود که در این صورت ماشین همیشه موقعیتش را خواهد دانست.
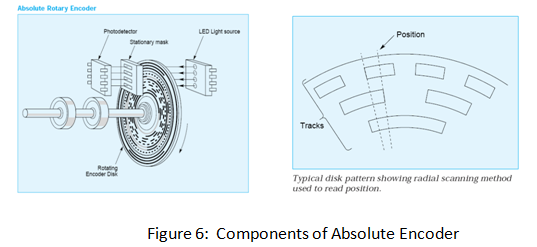
از چندین گروه از قطعات به فرم دایره های متحدالمرکز نقطه شروع دایره های متحدالمرکز در مرکز دیسک انکودر چرخشی است و چنانچه حلقه به سمت محیط دایره برود هر یک از آنها دارای دو برابر قطعه نسبت به حلقه قبلی و داخلی تر خود خواهند داشت اولین حلقه که داخلی ترین حلقه هاست یک قسمت شفاف و یک قسمت تیره خواهد داشت و حلقه سوم نیز از هر یک از قطعات ۴ قسمت خواهد داشت اگر انکودر دارای ۱۰ حلقه باشد آخرین حلقه یا دورترین آن از مرکز دارای ۵۱۲ قطعه می باشد چنانچه هر حلقه از انکودر ابسولت دارای دو برابر قطعه از حلقه قبلی خود باشد بین شماره ها یک سیستم باینری برقرار می شود. در این نوع انکودر به ازای هر حلقه روی دیسک وجود دارد یک منبع نور و دریافت کننده آن.
این بدان معناست که انکودر با ۱۰ حلقه دارای ۱۰ منبع نور و ۱۰ دریافت کننده خواهد بود. مزیت انکودر ابسولت geared down بودن آنست و مزیت دیگر آن یک دور چرخش دیسک درکل مدت چرخش ماشین خواهد بود.
اگر طول چرخش ماشین ۱۰ اینچ باشد انکودر ۱۶ بیت و دقت این ماشین برابر با ۱۰/۶۵۵۳۶ می شود که برابر با ۰/۰۰۰۱۵ اینچ است. اگر مدت چرخش ماشین طولانی باشد به اندازه هر دامنه، یک ریزالور بزرگ می تواند نگه دارد لبه ای از هر فوت چرخش را، و ریزالور (برطرف کننده) دوم می تواند نگه دارد موقعیت را در حدود یک فوت.
این بدان معناست که انکودر coarse می تواند دنده ای باشد هم چنین آن باعث یک چرخش باز درونی به اندازه ۶ فوت می شود حال آنکه fine resolver به صورت دنده ای است و دقت داخلی آن به اندازه ۱ foot افزایش خواهد داشت.
شکلهای بالا یک نمونه از دیسک انکودرهای مطلق چرخشی نشان می دهند و قسمت های دایره ای را و همچنین آن دیگرام محل ۱۶ منبع نور و ۱۶ ریسور آن را نشان می دهد.
چنانچه انکودر مطلق تولید کند فقط یک شماره برای هر موقعیت داخلی، آن می داند که قرار دارد روی میانی ترین نقطه و همچنین این انکودر نیازی به داخل شدن به نقطه خانه (homed) را ندارد و هر زمان روشن و خاموش شود نقطه صفر راگم نمی کند.
ریزالورها (برطرف کننده ها)
Resolvers
یک ریزالور روش باز خورد یا فیدبک برای تعریف موقعیت مطلق می باشد. استاتور دو موج به وجود می آورد یکی موج A و دیگری موج B، موج A قرار می گیرد با زاویه ای جلوتر از موج B روتور در حال کار هم تولید می کند یک موج سوم به نام C اینها تغذیه می شوند توسط یک ولتاژ سینوسی و روی محور خود می گردند.
سیگنال موج C استخراج می شود از دو موجb,a چرخش موج c علت مهم تحریک سیگنالهای استخراجی برای تغییر جهت و زاویه موقعیت می باشد ولتاژ تولیدی در a تربیع ولتاژ تولیدی در B می باشد. هر موقعیت در طول چرخش یک ارزش مختلف تولید می کند برای ترکیب b,a تصویر زیر این امر را توضیح می دهد.
به کار بردن خروجی هر دو موج یک موقعیت ثابت (مطلق) می دهد چنانچه هر موقعیت دارای ترکیب مختلفی از B,A می باشد. فرکانس نیز تغییر می کند با سرعت و هم می تواند ثابت باشد.
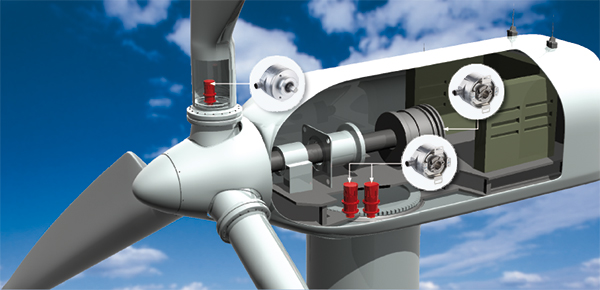
نحوه استفاده از انکودر در جرثقیل
یک نمونه استفاده انکودر ها
از فروشگاه ما دیدن فرمایید.
نظرات شما دوستان باعث رشد روز افزون گروه مهندسی الکترومارکت میگردد.