
سلام خدمت دوستان و همراهان عزیز الکترومارکت
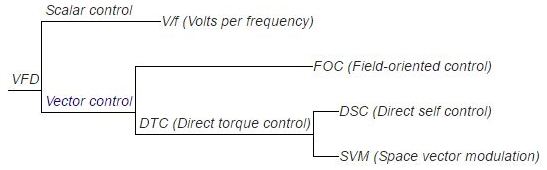
کنترل مستقیم گشتاور یا همان DTC که مخفف کلمات (Direct Torque Control) یکی از مد های کاری اینورتر های فرکانس متغیر است.
در مقاله های پیش تر توضیحی پیرامون کنترل وکتور کنترل (Vector Control) در اینورتر های فرکانس متغیر داده شده بود.
کنترل مستقیم گشتاور (DTC) یکی از روش های مورد استفاده در درایوهای فرکانس متغیر است.
که برای کنترل مستقیم گشتاور سه فازی موتورهای الکتریکی AC ( و در آخر برای سرعت) مورد استفاده قرار میگیرند.
این عملکرد شامل محاسبهی برآورد شار مغناطیسی موتور و گشتاور بر اساس ولتاژ اندازهگیری و جریان به موتور است.
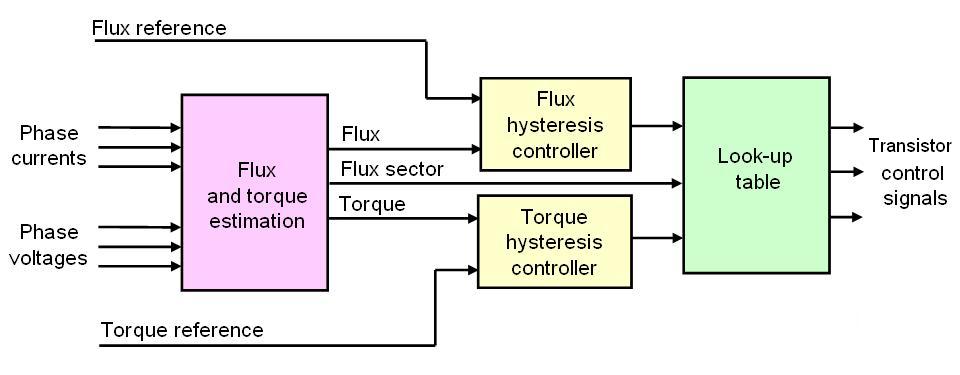
پلت فرم کنترل و نحوه عملکرد اینورتر در مد کنترل مستقیم گشتاور DTC
شار پیوندی استاتور ازطریق یکپارچه سازی ولتاژ استاتور برآورد شده است.
گشتاور به عنوان محصول متقابل شار محاسبه شده بردار شار پیوندی استاتور و بردار اندازه گیری شده ی جریان موتور است .
بزرگی شار و گشتاور محاسبه شده با مقادیر مرجع خود مقایسه میشوند.
اگر شار یا گشتاور بدست آمده بیش از حد از تحمل پذیری مرجع منحرف شوند،
ترانزیستور درایو فرکانس متغیر خاموش میشوند
به نحوی که خطای شار و گشتاور دوباره تا حد ممکن وارد باند تحمل میشوند.
پس، کنترل مستقیم گشتاور یکی از اشکال پسماند یا کنترل بنگ بنگ (Bang–bang control) است.
فواید استفاده از سیستم کنترل مستقیم گشتاور DTC را میتوان به شرح زیر بیان کرد:
- گشتاور و شار به سرعت از طریق تغییر مرجع ها تغییر می کنند
- راندمان بالا و تلفات پایین – تلفات های ناشی از سوئیچینگ یا تعویض کمتر می شوند زیرا ترانزیستورها فقط وقتی تعویض می شوند که گشتاور و شار در گرده انعطاف پذیری خود نیاز به تعویض داشته باشند.
- واکنش در این مرحله هیچ جهشی (overshot) ندارد.
- تبدیل مختصات نیاز نیست، همه ی محاسبات در سیستم مختصات ثابت انجام میگیرند
- مدولاسیون جداگانه ای مورد نیاز نیست، کنترل انعطاف پذیری مستقیما سیگنالهای کنترل سوئیچ را تعریف میکند
- هیچ کنترل کننده جریان PL ای وجود ندارد. در نتیجه به تنظیم کنترل نیاز نداریم
- فرکانس سوئیچینگ ترانزیستور ثابت نیست. اما با کنترل و مانیتور کردن تعقیرات باند، میانگین فرکانس سوئیچینگ را میتوان به مقدار مرجع آن نگه داشت. این امر همچنین، موج گشتاور و جریان را کم می کند. در نتیجه موج گشتاور و جریان دارای بزرگی یکسان بوده و فرکانس سوئیچینگ در انها همانند اینورتر در مد وکتورکنترل خواهد بود.
- با توجه به کنترل انعطاف پذیری فرایند سوئیچینگ طبیعتا، تصادفی است. بنابراین، در طیف جریان، قله ای وجود ندارد. این بیشتر به این معنی است که نویز شنیدنی دستگاه خیلی کم است.
- تغییر ولتاژ مدار DC میانی، به طور خودکار در الگوریتم ( الگوریتم ولتاژ) محاسبه می شود. بنابراین مشکلی در خصوص هارمونی های ولتاز DC یا گذرا بودن ولتاژ DC بوجود نمی آید.
- هماهنگ سازی دستگاههای دوار کنترل سریع، ساده و آسان است؛ تنها کافیست مرجع گشتاور را صفر کنید و اینورتر را روشن کنید. شار با اولین پالس جریان شناسایی می شود.
- تجهیزات کنترل دیجیتال باید خیلی سریع باشند تا بتوانند از انحراف بیش از حد گشتاور و شار درخصوص تحمل باندها جلوگیری کنند.
- معمولا الگوریتم کنترل هر 10-30 میکرو ثانیه یا کمتر باید انجام بگیرد. اما بخاطر آسانی الگوریتم ها، مقدار الگوریتم ها کمتر است.
- دستگاه اندازه گیری جریان باید کیفیت بالایی داشته باشد و نویز نداشته باشند زیرا اسپیک های موجود در سیگنالهای اندازه گیری شده به راحتی باعث اعمال کنترل نادرست میشوند. مشکل دیگر مربوط به این است که فیلتر پایین گذری وجود ندارد که بوسیله ی آن بتوان نویز را از بین برد زیرا فیلترها باعث ایجاد وقفه در مقاد بر واقعی شده و کنترل انعطاف پذیری را خراب می کنند.
- اندازه گیری ولتاژ استاتور باید تا حد ممکن خطای جبران کمی داشته باشد تا خطای برآورد شار را کم کند. به همین دلیل ولتاژهای استاتور معمولا از طریق ولتاژ مدار DC میانی و سیگنالهای کنترل ترانزیستور اندازه گیری می شوند.
- در سرعت های بالا، این روش نسبت به پارامترهای موتورحساس نیست. اما در سرعتهای پایین، خطا در مقاومت استاتورمورد استفاده در برآورد شار استاتور، با خلاصه بندی خواص DTC در مقایسه با field-oriented control یا همان وکتور کنترل بسیار بحرانی می شود.
11 عامل اختلال در کیفیت برق + راه حل ها”
روش کنترل مستقیم گشتاور حتی بدون سنسور سرعت (Encoder) نیز خوب عمل میکند.
اما برآورد شار معمولا بر اساس یکپارچه سازی ولتاژ فاز موتور میباشد.
بخاطر خطاهای اجتناب ناپذیر در اندازه گیری ولتاژ و برآورد مقاومت استاتور، انتگرال ها در سرعت های پایین دچار خطا می شوند.
اگر فرکانس خروجی در اینورتر فرکانس متغیر صفر باشد، کنترل موتور ممکن نیست.
با اینحال، با طراحی دقیق سیستم کنترل میتوان حداقل فرکانس را در محدوده ی 0.5 هرتز تا 1 هرتز داشت
و این میزان برای بکارانداختن یک موتور القایی با گشتاور کامل از وضعیت توقف کافی است .
این قابلیت را در اینورتر سانترنو ایتالیا سری پنتا (santerno sinus penta) میتوان به خوبی یافت و استفاده کرد.
اگر سرعت از رنج صفر خیلی سریع عبور کند به طوری که بتواند از انحراف اضافی برآورد شار جلوگیری کند،
واژگونی جهت چرخش نیز کافی است.
اگر نوع کاربرد به شکلی باشد که نیاز به عملیات مستمر در سرعت های پایین شامل عملیات فرکانس صفر لازم باشد، سنسور سرعت یا موقعیت میتوانند یا بهتر بگویم باید به سیستم DTC اضافه شوند.
با وجود این سنسور، دقت بالای گشتاور و سرعت کنترل در تمام رنج سرعت حفظ میشوند.
چه مواردی باید درهنگام راه اندازی اینورتر مورد بررسی قرار گیرد؟”
تاریخچه کنترل مستقیم گشتاور
DTC توسط مانفرد دیپنبروک در ایالات متحده به ثبت رسید و در آلمان برای دومین بار در تاریخ 20 اکتبر 1984 ثبت شد، هر دو اختراع بنام کنترل خود مختار مستقیم (DSC) ثبت شدند. با اینحال، ایسائو تاکاهاشی و توشیهیکو نوگوچی تکنیک کنترلی مشابهی را توصیف نمودند و آن را DTC نامیدند و در سپتامبر 1984 در مجله ای بنام IEEJ و در IEEE در سال 1986 چاپ شد. نوآوری DTC نیز بنام سه نفر ثبت شده است.
تنها تفاوت بین DTC و DSC در شکل راهی است که در طول آن بردار شار کنترل می شود،
راه DTC شبه دایره است در حالیکه راه DSC شش ضلعی است یعنی؛ فرکانس سوئیچینگ در DTC بیشتر از DSC است.
DTC برای درایو قدرت کم تا متوسط مناسب است و DSC در درایوهای قدرت بالا مورد استفاده قرار می گیرد.
از اواسط دهه ی 1980، معرفی این برنامهها آغاز شد. DTC برای بهره وری که ایجاد میکند استفاده می شود زیرا ساده است و پاسخ کنترل شار و گشتاور سریعی در موتورهای القایی با سرعت بالا دارد. DTC
در پایان نامه ی بادر 1989 این موضوع به خوبی مورد بررسی قرار گرفته است.
الگوریتم DTC کنترل مستقیم گشتاور نیز در کنترل مبدل ریجنریتیو نیز استفاده شده است.
مبدل ریجنریتیو از نظر ساختاری با دستگاه کنترل اینورتر ترانزیستور مشابه است.
بنابراین، علاوه بر تبدیل AC به DC می تواند انرژی بازخورد DC را نیز به AC تبدیل کند.
علاوه بر این شکل موج جریان فاز بسیار سینوسی است .
و ضریب قدرت را میتوان به نحوی که مورد دلخواه است تنظیم نمود.
در نسخه ی مبدل ریجنریتیو سانترنو DTC کانورتر sinus penta rgn ، شبکه دستگاه الکتریکی بزرگی در نظر گرفته می شود.
تعجب آور نیست که اینورتر سانترنو ایتالیا از این قابلیت بهره مند شده است و سری پنتا (sinus penta) این قابلیت را پشتیبانی میکند.
در اوایل 2000، DTC در کنترل ماشین دوسو تغذیه استفاده شد.
ژنراتور دوسو تغذیه معمولا در توربین بادی 1-3 مگاوات مورد استفاده قرار میگیرد. باتوجه به عملکرد برجسته DTC
از اواخر دهه ی 1990 مقالات زیادی در زمینه DTC و تغییرات آن از قبیل مدولاسیون بردار نگاشته شده اند.
که فرکانس سوئیچینگ ثابتی را ارائه می دهند.
گروه مهندسی الکترومارکت در خدمت شما است. 09122659154
مطالب الکترومارکت را در کانال تلگرام الکترومارکت دنبال کنید.
متشکرم که تا انتهای این مقاله با ما بودید منتظر نظرات خوبتون هستم.
نظرات شما دوستان باعث ارتقای سطح کیفی الکترومارکت میگردد.ما در 24 ساعت از 7 روز هفته منتظر شنیدن صدای شما هستیم
02165292580
02165295301






سلام و وقت بخیر.
می خواستم اگه بشه مراجع زبان اصلی در مورد درایو ها و مد های مختلف کنترل و جزییاتشون معرفی کنید تا بتونم مطالعات کامل تری رو در این زمینه داشته باشم . سایت، کتاب و …
با تشکر.
با سلام و عرض خسته نباشید
یه سوال داشتم ، ایا در هر فرکانس اعمالی بر روی موتور توسط اینورترها، بیشترین گشتاور روی موتور خواهیم داشت؟
سلام معمولا اینورتر هایی که در مد وکتور کنترل الگوریتم های خوبی دارند (نه همه مارک ها و مدل ها) و در این بخش خوب عمل کردند این قابلیت را به شما میدهند که در بازه فرکانس ۰.۵ هرتز گشتاور ۱۰۰% رو روی موتور داشته باشید حتما دقت کنید در فرکانس های پایین خصوصا در مد وکتور کنترل به جهت نوع کنترل ولتاژ و جریان در استاتور و سرعت پایین موتور دمای بدنه موتور به شدت افزایش پیدا میکند و برای جلوگیری از این مشکل باید از فن اکسترنال در پشت موتور استفاده شود. مقاله الگوریتم وکتور کنترل + نحوه عملکرد اینورتر به خوبی به این بحث پرداخته شده است و یک ویدئو در انتهای مقاله وکتور کنترل مخصوص سوال شما اضافه کردم که به درک بهتری از وکتور کنترل برسید.
ممنون از درج دیدگاه و مطالعه مقالات.