
موتورهای الکتریکی: انواع، کاربردها و راهنمای انتخاب برای نیازهای شما
ارائه شده توسط الکترومارکت

موتورهای الکتریکی، ماشینهایی بنیادین هستند که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکنند. این تبدیل انرژی معمولاً به شکل نیروی چرخشی یا گشتاور بر روی یک شفت خروجی اعمال میشود. این فرآیند حیاتی از طریق تعامل بین میدان مغناطیسی موتور و جریان الکتریکی جاری در سیمپیچها محقق میگردد. موتورهای الکتریکی در هر گوشه از زندگی مدرن ما حضور دارند؛ از لوازم خانگی کوچک و ابزارهای برقی گرفته تا ماشینآلات عظیم صنعتی، سیستمهای پیشرانش دریایی و وسایل نقلیه الکتریکی. گستردگی کاربرد آنها نقش حیاتیشان را در صنعت و زندگی روزمره برجسته میسازد.
این مقاله به بررسی اصول بنیادین حاکم بر عملکرد موتورهای الکتریکی، دستهبندیهای اصلی آنها (AC در مقابل DC)، انواع فرعی، کاربردهای متنوع و راهنماییهایی برای انتخاب موتور مناسب بر اساس نیازهای خاص میپردازد. همچنین، نقش درایوهای فرکانس متغیر (VFD) در بهینهسازی عملکرد و بهرهوری انرژی موتورها مورد بحث قرار خواهد گرفت.
الکترومارکت نه تنها بهترین اینورترها (VFD) را عرضه میکند، بلکه در تمامی مراحل از مشاوره اولیه و انتخاب تا تعمیرات تخصصی، در کنار شماست. هدف ما افزایش بهرهوری و کاهش هزینههای شماست.
1. اصول بنیادین عملکرد موتورهای الکتریکی
عملکرد هر موتور الکتریکی بر پایه قوانین بنیادی الکترومغناطیس استوار است که تبدیل انرژی الکتریکی به حرکت مکانیکی را ممکن میسازد. این فرآیند از طریق تعامل بین میدانهای مغناطیسی و جریانهای الکتریکی در هادیها صورت میگیرد.
تبدیل انرژی الکتریکی به مکانیکی
وظیفه اصلی یک موتور الکتریکی، تبدیل انرژی الکتریکی دریافتی به انرژی مکانیکی است. این تبدیل بر اساس اصول الکترومغناطیسی پایهای است که توسط دانشمندانی چون مایکل فارادی و جیمز کلرک ماکسول تبیین شدهاند.
نقش الکترومغناطیس: قوانین فارادی و لورنتس
میدانهای مغناطیسی، نیرویی را بر هادیهای حامل جریان الکتریکی اعمال میکنند که این اساس کار موتورهای الکتریکی است. این میدانها میتوانند توسط آهنرباهای دائمی یا، رایجتر، توسط آهنرباهای الکتریکی که از سیمپیچهای حامل جریان تشکیل شدهاند، تولید شوند.
قانون القای الکترومغناطیسی فارادی بیان میکند که تغییر در میدان مغناطیسی درون یک سیمپیچ، نیروی محرکه الکتریکی (EMF) یا ولتاژی را القا میکند که به نوبه خود جریان الکتریکی را به حرکت درمیآورد. این اصل برای القای جریان در روتور موتورهای القایی و همچنین برای تولید نیروی محرکه الکتریکی معکوس (Back-EMF) در موتورهای DC حیاتی است.
قانون نیروی لورنتس تصریح میکند که یک هادی حامل جریان درون یک میدان مغناطیسی، نیرویی را تجربه میکند که عمود بر جهت جریان و جهت میدان مغناطیسی است. این نیرو، هنگامی که بر سیمپیچهای روتور اعمال میشود، گشتاور تولید میکند؛ گشتاور معادل چرخشی نیروی خطی است که باعث چرخش شفت موتور میشود. جهت این نیرو و چرخش حاصله را میتوان با استفاده از قانون دست راست تعیین کرد.
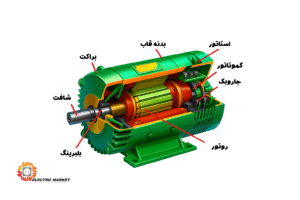
اجزای اصلی موتور
یک موتور الکتریکی در پیکربندی پایه خود از دو بخش اصلی تشکیل شده است:
-
استاتور (Stator): بخش ثابت موتور است که معمولاً آهنرباهای میدان (الکترومغناطیس یا آهنرباهای دائمی) را در خود جای میدهد و میدان مغناطیسی اصلی را ایجاد میکند. هستههای استاتور اغلب از ورقههای نازک فولاد الکتریکی لمینت شده ساخته میشوند تا تلفات ناشی از جریانهای گردابی را کاهش دهند.
-
روتور (Rotor): بخش چرخنده موتور است که به شفت خروجی متصل است. این بخش شامل سیمپیچهای آرمیچر است که جریان از آنها عبور کرده و با میدان مغناطیسی استاتور تعامل میکند تا گشتاور تولید شود.
-
سیمپیچها (Windings): سیمهای مارپیچی هستند که معمولاً به دور یک هسته فرومغناطیسی پیچیده شدهاند و با عبور جریان از آنها، قطبهای مغناطیسی ایجاد میکنند.
-
کموتاسیون (Commutation): برای حفظ چرخش مداوم، به ویژه در موتورهای DC، جهت جریان در سیمپیچها (یا جهتگیری میدان مغناطیسی) باید به صورت همزمان با چرخش روتور تغییر کند. این فرآیند در موتورهای DC براشدار به صورت مکانیکی توسط کموتاتور و براشها انجام میشود. در موتورهای AC و DC بدون براش، این عمل به صورت الکترونیکی و بدون تماس فیزیکی صورت میگیرد.
این تفاوت اساسی در مکانیزم کموتاسیون، عامل اصلی تمایز در مزایا، معایب و حوزههای کاربرد موتورهای AC، DC براشدار و DC بدون براش است. این موضوع نشاندهنده تلاش مستمر مهندسی برای بهبود بهرهوری، قابلیت اطمینان و کنترل از طریق پیشرفت در مواد و الکترونیک است. حرکت از کموتاسیون مکانیکی به الکترونیکی، یک روند کلیدی در فناوری موتورها به شمار میرود.
2. دستهبندی اصلی موتورهای الکتریکی: AC در مقابل DC
موتورهای الکتریکی به طور گسترده بر اساس نوع منبع تغذیه خود به دو دسته اصلی تقسیم میشوند: موتورهای جریان متناوب (AC) و موتورهای جریان مستقیم (DC). هر دو نوع، انرژی الکتریکی را از طریق تولید میدانهای مغناطیسی چرخشی به انرژی مکانیکی تبدیل میکنند.
موتورهای جریان متناوب (AC Motors): مزایا، معایب و کاربردها
موتورهای AC توسط منابع جریان متناوب مانند شبکه برق یا اینورترها تغذیه میشوند.
مزایا:
-
معمولاً قدرتمندتر از موتورهای DC در نظر گرفته میشوند، زیرا میتوانند گشتاور بالاتری با جریانهای قویتر تولید کنند.
-
بسیار بادوام و قابل اعتماد هستند و به دلیل داشتن قطعات متحرک کمتر (مانند عدم وجود براش/کموتاتور در اکثر انواع)، نیاز به نگهداری کمتری دارند.
-
از نظر انرژی کارآمد، چندمنظوره و مقرون به صرفه برای بسیاری از کاربردهای صنعتی هستند.
-
سطوح جریان راهاندازی و شتاب آنها قابل کنترل است.
معایب:
-
ممکن است خرید و نصب آنها گرانتر از برخی موتورهای DC باشد.
-
برای کنترل دقیق سرعت و گشتاور ممکن است به سیستم الکتریکی یا کنترل پیچیدهتری نیاز داشته باشند که اغلب مستلزم استفاده از VFD است.
کاربردها: به طور گسترده در تنظیمات صنعتی برای فنها، تهویه مطبوع، پمپها، کمپرسورها، سیستمهای نوار نقاله و تجهیزات حمل و نقل استفاده میشوند. همچنین در لوازم خانگی نیز رایج هستند.
موتورهای جریان مستقیم (DC Motors): مزایا، معایب و کاربردها
موتورهای DC توسط منابع جریان مستقیم مانند باتریها یا یکسوکنندهها تغذیه میشوند.
مزایا:
-
گشتاور و توان راهاندازی بالایی ارائه میدهند و زمان پاسخگویی سریعی به شروع، توقف و شتاب دارند.
-
کنترل دقیق سرعت، موقعیت و گشتاور را فراهم میکنند، به ویژه انواع بدون براش.
-
معمولاً در تبدیل انرژی ورودی به انرژی مکانیکی، کارآمدتر از موتورهای AC براشدار هستند.
-
در چندین ولتاژ استاندارد موجود هستند که یکپارچهسازی آنها را آسانتر میکند.
معایب:
-
موتورهای DC براشدار به دلیل سایش براش و کموتاتور، هزینههای نگهداری بالاتری دارند که منجر به عمر کوتاهتر در مقایسه با موتورهای القایی AC میشود.
-
ساختار آنها به دلیل این اجزا میتواند پیچیدهتر و گرانتر باشد.
کاربردها: در واحدهای ساخت و تولید، ماشینآلاتی که نیاز به توان ثابت دارند (مانند جاروبرقی، آسانسور، چرخ خیاطی)، تجهیزات مرتبسازی انبار ، سیستمهای خودرو، لوازم الکترونیکی مصرفی، دستگاههای پزشکی و سیستمهای انرژی تجدیدپذیر استفاده میشوند.
در گذشته، موتورهای DC کنترل سرعت و گشتاور برتری را ارائه میدادند که آنها را برای کاربردهای دقیق ضروری میساخت، با وجود معایب نگهداریشان. با این حال، دسترسی گسترده به شبکههای برق AC و پیشرفتها در الکترونیک قدرت (مانند VFDها) باعث شده است که موتورهای AC به طور فزایندهای چندمنظوره و قابل کنترل شوند. این امر منجر به سلطه موتورهای AC در بسیاری از کاربردهای صنعتی و خانگی شده است، جایی که قبلاً برای کنترل سرعت متغیر کمتر مناسب بودند. بنابراین، در حالی که موتورهای DC (به ویژه انواع بدون براش) همچنان در کاربردهایی که نیاز به دقت بالا، اندازه فشرده و نویز کم دارند، برتری دارند، توسعه VFDها شکاف عملکردی را به طور قابل توجهی کاهش داده است. این امکان را به موتورهای AC میدهد که کنترل مشابهی را با نگهداری کمتر به دست آورند و آنها را به “اسبهای کار” صنعت مدرن تبدیل کند. این روند نشاندهنده تغییر مداوم به سمت موتورهای AC با کنترلهای الکترونیکی پیشرفته برای استفاده عمومی صنعتی است، در حالی که کاربردهای تخصصی همچنان از نقاط قوت منحصر به فرد موتورهای DC بهره خواهند برد.
جدول: مقایسه جامع موتورهای AC و DC
| ویژگی | موتور AC | موتور DC |
| منبع تغذیه | جریان متناوب (AC) | جریان مستقیم (DC) |
| بازده |
معمولاً کارآمدتر (سیستم کلی با VFD) |
معمولاً کارآمدتر (خود موتور) |
| قابلیتهای سرعت |
میتواند در سرعتهای بالاتر کار کند |
نمیتواند در سرعتهای بالا کار کند (براشدار) |
| پیچیدگی کنترل |
پیچیدهتر برای طراحی/ساخت (بدون VFD، کنترل کمتر دقیق) |
سادهتر برای طراحی/ساخت (براشدار) |
| طراحی/ساخت |
بدون براش/کموتاتور (ساختار سادهتر) |
دارای براش/کموتاتور (ساختار پیچیدهتر برای براشدار) |
| نگهداری |
نگهداری کمتر |
نگهداری بالاتر (براشدار) |
| گشتاور راهاندازی (کلی) |
راهاندازی انعطافپذیر |
گشتاور راهاندازی بالا |
| هزینه (کلی) |
اغلب مقرون به صرفهتر (القایی) |
میتواند گرانتر باشد (براشدار) |
| کاربردهای رایج |
ماشینآلات صنعتی، HVAC، پمپها، فنها، لوازم خانگی |
ساخت و تولید، ماشینآلات با توان ثابت، خودرو، رباتیک، پزشکی |
3. انواع موتورهای جریان متناوب (AC Motors) و ویژگیهای آنها
دو نوع اصلی موتورهای AC، موتورهای القایی (که به آنها موتورهای آسنکرون نیز گفته میشود) و موتورهای سنکرون هستند.
موتورهای القایی (Induction Motors)
موتورهای القایی بر اساس اصل القای الکترومغناطیسی کار میکنند، جایی که جریان الکتریکی در روتور توسط میدان مغناطیسی چرخشی استاتور القا میشود، بدون نیاز به اتصال الکتریکی مستقیم به روتور.
نحوه کار و مفهوم “لغزش”
برای القای جریان در روتور، سرعت فیزیکی روتور باید کمی کمتر از سرعت میدان مغناطیسی چرخشی استاتور (سرعت سنکرون) باشد. این تفاوت در سرعت “لغزش” نامیده میشود. اگر روتور با سرعت سنکرون میچرخید، هیچ حرکت نسبی وجود نداشت، جریانی القا نمیشد و در نتیجه گشتاوری تولید نمیگردید.
سرعت سنکرون (Ns) توسط فرکانس (F) منبع تغذیه و تعداد قطبهای مغناطیسی (p) در سیمپیچ استاتور تعیین میشود: Ns = 120 * F / p. لغزش (S) به صورت S = (Ns – Nr) / Ns محاسبه میشود، که در آن Nr سرعت مکانیکی روتور است. تحت بار، سرعت روتور کاهش مییابد و لغزش افزایش مییابد، که منجر به القای جریان بیشتر و تولید گشتاور بیشتر میشود.
انواع: تکفاز و سهفاز
-
موتورهای القایی تکفاز: معمولاً در لوازم خانگی و بارهای کوچکتر استفاده میشوند. این موتورها به طور کلی خود راهانداز نیستند و برای ایجاد میدان مغناطیسی چرخشی اولیه و تأمین گشتاور راهاندازی به مکانیزمهای کمکی (مانند خازنهای راهانداز یا سیمپیچهای فاز-اسپلیت) نیاز دارند.
-
موتورهای القایی سهفاز: به دلیل خود راهانداز بودن، قابلیت اطمینان و مقرون به صرفه بودن، به طور گستردهای به عنوان درایوهای صنعتی استفاده میشوند. آنها به طور طبیعی با تغذیه از یک منبع AC سهفاز، یک میدان مغناطیسی چرخشی تولید میکنند.
کاربردها
ماشینآلات صنعتی (مانند نوارهای نقاله، کمپرسورها، آسانسورها)، لوازم خانگی (مانند فنها، یخچالها، ماشینهای لباسشویی، تهویه مطبوع) و سیستمهای HVAC.
موتورهای سنکرون (Synchronous Motors)
موتورهای سنکرون، موتورهای AC هستند که در آنها روتور دقیقاً با همان سرعت میدان مغناطیسی چرخشی استاتور میچرخد، به این معنی که با سرعتی ثابت و همزمان با فرکانس منبع تغذیه کار میکنند. روتور به طور کامل با میدان مغناطیسی استاتور “قفل” میشود.
نحوه کار و سرعت ثابت
این موتورها برای سیمپیچهای روتور خود به تحریک DC جداگانه (یا آهنرباهای دائمی) نیاز دارند تا یک میدان مغناطیسی پیوسته ایجاد کنند. برخلاف موتورهای القایی، موتورهای سنکرون برای کارکرد خود به لغزش متکی نیستند و گشتاور نامی را دقیقاً با سرعت سنکرون تولید میکنند. نکته مهم این است که موتورهای سنکرون به طور کلی خود راهانداز نیستند و برای رساندن روتور به سرعت نزدیک به سنکرون قبل از “قفل شدن”، به وسایل کمکی (مانند یک موتور کمکی یا سیمپیچ قفس سنجابی) نیاز دارند.
کاربردها
در کاربردهایی که نیاز به کنترل دقیق سرعت دارند (مانند ساعتها، تایمرها، ابزارهای با دقت بالا، نوردها، ماشینابزار، خطوط تولید، نوار نقالهها). همچنین به دلیل توانایی آنها در کار با ضریب توان پیشفاز، برای اصلاح ضریب توان در سیستمهای توزیع برق نیز استفاده میشوند.
موتورهای القایی به دلیل خود راهانداز بودن (برای سهفاز)، سادگی، دوام و هزینه کمتر، به عنوان “اسبهای کار” در نظر گرفته میشوند. با این حال، سرعت آنها ذاتاً با بار تغییر میکند (به دلیل لغزش)، که کنترل دقیق سرعت را بدون دستگاههای خارجی مانند VFDها چالشبرانگیز میسازد. در مقابل، موتورهای سنکرون، اگرچه پیچیدهتر و گرانتر هستند (اغلب به یک تحریککننده و مکانیزم راهاندازی نیاز دارند)، سرعت ثابت و بازدهی بالاتری را ارائه میدهند، به ویژه در ضریب توانهای بالا. این نشاندهنده یک فلسفه طراحی بنیادین است: اولویت دادن به سادگی و هزینه برای کاربردهای عمومی (موتورهای القایی) یا دقت و کارایی برای وظایف تخصصی و پرتقاضا (موتورهای سنکرون). ظهور VFDها این مرز را تا حدی محو کرده است و به موتورهای القایی اجازه میدهد تا قابلیتهای کنترلی نزدیک به موتورهای سنکرون را به دست آورند و بدین ترتیب تطبیقپذیری آنها افزایش یابد. این همچنین به این معنی است که برای بسیاری از کاربردها، “بهترین” موتور AC ممکن است یک موتور القایی همراه با VFD باشد که تعادلی از هزینه، کنترل و کارایی را ارائه میدهد.
جدول: مقایسه موتورهای القایی و سنکرون
| ویژگی | موتور القایی | موتور سنکرون |
| سرعت |
با بار تغییر میکند (غیر ثابت) |
ثابت (همزمان با فرکانس تغذیه) |
| خود راهانداز |
بله (سهفاز)، خیر (تکفاز) |
خیر (نیاز به مکانیزم راهاندازی خارجی) |
| بازده |
عموماً کمتر از موتور سنکرون |
بالاتر |
| ضریب توان |
پایینتر (به دلیل ضریب توان پسفاز) |
بهتر (نزدیک به واحد) |
| نوع روتور |
قفس سنجابی یا روتور سیمپیچی |
روتور الکترومغناطیسی |
| لغزش |
وجود دارد (سرعت روتور < سرعت سنکرون) |
بدون لغزش (سرعت روتور = سرعت سنکرون) |
| هزینه |
ارزانتر |
گرانتر |
| کاربردهای رایج |
کاربردهای صنعتی/خانگی که سرعت ثابت حیاتی نیست |
کاربردهای با توان بالا، ژنراتورها، زمانبندی دقیق |
4. انواع موتورهای جریان مستقیم (DC Motors) و ویژگیهای آنها
موتورهای DC توسط جریان مستقیم تغذیه میشوند و به دلیل گشتاور راهاندازی قوی و قابلیتهای کنترل دقیق خود شناخته شدهاند. آنها عمدتاً به دو نوع براشدار و بدون براش طبقهبندی میشوند.
موتورهای DC براشدار (Brushed DC Motors)
موتورهای DC براشدار از براشها برای انتقال جریان الکتریکی به یک کموتاتور چرخشی استفاده میکنند که به نوبه خود جهت جریان را در سیمپیچهای روتور معکوس میکند تا چرخش مداوم حفظ شود. این کموتاسیون مکانیکی، محور اصلی عملکرد آنها است.
نحوه کار و اجزا
اجزای کلیدی شامل استاتور (با آهنرباهای دائمی یا سیمپیچهای میدان)، روتور (سیمپیچهای آرمیچر)، کموتاتور و براشها هستند. هنگامی که ولتاژ به ترمینالهای موتور اعمال میشود، جریان از طریق براشها به کموتاتور و سپس به سیمپیچهای روتور میرسد و یک میدان مغناطیسی در اطراف روتور ایجاد میکند. تعامل این میدان با میدان استاتور، گشتاور را تولید کرده و روتور را به حرکت درمیآورد. با چرخش روتور، قطعات کموتاتور از براشها عبور میکنند و به صورت دورهای جهت جریان در سیمپیچهای روتور را معکوس میکنند تا تعامل میدانها حفظ شده و چرخش ادامه یابد.
انواع: سری، شنت، کمپوند
-
موتور DC با آهنربای دائمی (PMDC): از آهنرباهای دائمی در استاتور برای ایجاد میدان مغناطیسی استفاده میکند. این نوع موتور ساده و مقرون به صرفه است و گشتاور خوبی در سرعتهای پایین ارائه میدهد، اما ممکن است خواص مغناطیسی خود را در دماهای بالا از دست بدهد.
-
موتورهای DC با سیمپیچ میدان (Wound-Field DC Motors): این موتورها دارای سیمپیچهای میدان در استاتور هستند و بر اساس نحوه اتصال این سیمپیچها به آرمیچر دستهبندی میشوند:
-
سری (Series-Wound): سیمپیچ میدان به صورت سری با آرمیچر متصل است. این موتورها گشتاور راهاندازی بسیار بالایی دارند و برای بارهای سنگین (مانند جرثقیلها، بالابرها) ایدهآل هستند. سرعت آنها به شدت با بار تغییر میکند و در حالت بیبار میتوانند به سرعتهای خطرناکی برسند.
-
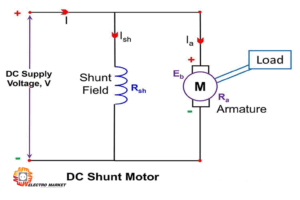
شنت (Shunt-Wound): سیمپیچ میدان به صورت موازی (شنت) با آرمیچر متصل است. این موتورها سرعت تقریباً ثابتی را بدون توجه به بار ارائه میدهند و برای کاربردهایی که به سرعت ثابت بدون نیاز به گشتاور راهاندازی بالا نیاز دارند (مانند نوار نقالهها)، مناسب هستند. گشتاور راهاندازی آنها پایین است.
-
کمپوند (Compound-Wound): ترکیبی از سیمپیچهای سری و شنت است. این نوع موتور تعادلی از گشتاور راهاندازی بالا (از سیمپیچ سری) و تنظیم سرعت خوب (از سیمپیچ شنت) را ارائه میدهد و برای شرایط راهاندازی دشوار که نیاز به سرعت ثابت دارند، مناسب است. میتواند از نوع تجمعی (میدانها یکدیگر را تقویت میکنند) یا تفاضلی (میدانها یکدیگر را خنثی میکنند) باشد.
-
مزایا، معایب و نگهداری
مزایا:
-
گشتاور راهاندازی قوی، زمان پاسخگویی سریع، کنترل دقیق سرعت/موقعیت/گشتاور (به ویژه با ورودیهای کنترلی)، قابلیت تنظیم سرعت متغیر با تغییر ولتاژ تغذیه یا جریان میدان.
-
مدار کنترل نسبتاً ساده.
معایب:
-
هزینههای نگهداری بالاتر به دلیل سایش براش و کموتاتور، که منجر به نیاز به تعویض دورهای و احتمال خرابی موتور میشود.
-
میتواند نویز الکتریکی و صوتی و همچنین جرقههای یونیزهکننده تولید کند.
-
به دلیل تلفات اصطکاکی، بازدهی کمتری نسبت به انواع بدون براش دارند.
کاربردها
در خودروها (سیستمهای پیشرانش، سیستمهای کمکی)، ماشینآلات صنعتی (اتوماسیون، کنترل)، لوازم الکترونیکی مصرفی، دستگاههای پزشکی، سیستمهای انرژی تجدیدپذیر، ابزارهای برقی و لوازم خانگی.
موتورهای DC بدون براش (Brushless DC Motors – BLDC)
موتورهای BLDC با حذف کموتاتور و براشهای مکانیکی، آنها را با سیستمهای کموتاسیون الکترونیکی جایگزین میکنند. این تغییر منجر به مزایای قابل توجهی میشود:
مزایا (بازدهی بالا، نگهداری کم، نسبت توان به وزن بالا):
-
بازدهی بالا: گشتاور بیشتر به ازای هر وات توان ورودی، به ویژه در شرایط بیبار و کمبار، به دلیل کاهش تلفات انرژی مکانیکی ناشی از اصطکاک.
-
نگهداری کم و قابلیت اطمینان بالا: عمر طولانیتر و نیاز به نگهداری کمتر، زیرا براشها برای سایش وجود ندارند. طول عمر آنها عمدتاً به عمر بلبرینگها محدود میشود.
-
نسبت توان به وزن بالا: میتوانند توان بیشتری را نسبت به وزن خود ارائه دهند و از این رو فشرده و سبک هستند.
-
سرعت بالا و کنترل آنی: قادر به دستیابی به سرعتهای چرخشی بالاتر و ارائه کنترل تقریباً آنی بر سرعت و گشتاور هستند.
-
کاهش نویز و EMI: عملکرد آرامتر و حذف جرقههای یونیزهکننده و تداخل الکترومغناطیسی (EMI) مرتبط.
-
خنکسازی بهتر: سیمپیچها معمولاً روی استاتور (محفظه) قرار دارند، که امکان دفع بهتر گرما از طریق هدایت را فراهم میکند و طراحیهای محصور و محافظت شده در برابر آلودگی را ممکن میسازد.
-
انعطافپذیری بیشتر: کموتاسیون الکترونیکی امکان ویژگیهای پیشرفتهای مانند محدودیت سرعت، میکرو استپینگ و گشتاور نگهدارنده را فراهم میکند.
کاربردها
در لوازم جانبی کامپیوتر (درایوهای دیسک، فنهای خنککننده)، ابزارهای برقی بیسیم (دریلها، دمندهها)، وسایل نقلیه الکتریکی و هیبریدی، دوچرخههای برقی، پهپادها، پیشرانههای دریایی، سیستمهای HVAC، اتوماسیون صنعتی (کنترل حرکت، عملگرهای خطی، سروو موتورها، رباتهای صنعتی، ماشینابزار CNC) و رباتیک رزمی غالب هستند.
تکامل از موتورهای DC براشدار به موتورهای DC بدون براش، یک جهش تکنولوژیک قابل توجه است. نوآوری اصلی در جایگزینی براشها و کموتاتورهای مکانیکی با کنترلکنندههای الکترونیکی نهفته است. این تغییر مستقیماً به معایب اصلی موتورهای براشدار (سایش، نگهداری، نویز و جرقه) رسیدگی میکند. با حذف این محدودیتهای مکانیکی، موتورهای BLDC به بازدهی، قابلیت اطمینان، چگالی توان و کنترل برتری دست مییابند. این تغییر نشاندهنده یک روند گستردهتر در مهندسی برق به سمت استفاده از فناوری نیمههادی برای افزایش عملکرد و طول عمر است.
این موضوع نشان میدهد که در حالی که موتورهای DC براشدار برای کاربردهای حساس به هزینه یا با تقاضای کمتر همچنان قابل استفاده هستند، موتورهای BLDC آینده سیستمهای با عملکرد بالا، بدون نیاز به نگهداری و با کنترل دقیق را رقم میزنند و نوآوری را در زمینههایی مانند رباتیک، وسایل نقلیه الکتریکی و تولید پیشرفته هدایت میکنند. این همچنین به طور ضمنی نیاز به سیستمهای کنترل پیشرفته (مانند VFDها، که اساساً کموتاتورهای الکترونیکی برای موتورهای AC هستند) را برای بهرهبرداری کامل از پتانسیل طراحیهای موتور مدرن تأیید میکند.
جدول: مقایسه موتورهای DC براشدار و بدون براش
| ویژگی | موتور DC براشدار | موتور DC بدون براش |
| روش کموتاسیون |
مکانیکی (براش/کموتاتور) |
الکترونیکی (کنترلکننده) |
| بازده |
پایینتر (به دلیل اصطکاک) |
بالاتر (بدون تلفات اصطکاکی) |
| نگهداری |
بالا (نیاز به تعویض براش) |
کم (فقط بلبرینگها) |
| قابلیت اطمینان |
پایینتر (قطعات سایششونده) |
بالا (قطعات سایششونده کمتر) |
| محدوده سرعت |
محدود (توسط کموتاسیون) |
وسیعتر |
| نویز/EMI |
بالاتر (جرقه، صوتی) |
پایینتر (بدون جرقه) |
| نسبت توان به وزن |
پایینتر |
بالاتر |
| هزینه |
عموماً پایینتر |
عموماً بالاتر |
| پیچیدگی کنترل |
سادهتر |
پیچیدهتر (نیاز به کنترلکننده الکترونیکی) |
| کاربردهای رایج |
ابزارهای برقی، اسباببازی، لوازم خانگی پایه، سیستمهای کمکی خودرو |
رباتیک، پهپادها، وسایل نقلیه الکتریکی، لوازم خانگی با عملکرد بالا، اتوماسیون صنعتی |
5. درایوهای فرکانس متغیر (VFD): کنترل هوشمند و بهینهسازی عملکرد موتور
درایوهای فرکانس متغیر (VFD)، که به عنوان اینورتر فرکانس، مبدل فرکانس یا درایو AC نیز شناخته میشوند، دستگاههای الکترونیکی هستند که سرعت و عملکرد یک موتور الکتریکی AC (موتور القایی یا PM) را با تنظیم فرکانس و ولتاژ توان ورودی به آن، به دقت تنظیم میکنند. این تنظیم امکان عملکرد روانتر، بهبود بهرهوری انرژی و کنترل پیشرفتهتر بر عملکردهای موتور را فراهم میآورد.
VFD چیست و چگونه کار میکند؟
یک VFD با تبدیل توان AC ورودی به یک منبع فرکانس و ولتاژ قابل تنظیم کار میکند که کنترل دقیق سرعت موتور را ممکن میسازد. سرعت موتور (N) با فرکانس (f) توان اعمالی و تعداد قطبهای موتور (p) تعیین میشود، همانطور که با فرمول N = 120 * f / p توصیف میشود.
اصل کار: یک VFD ابتدا توان AC ورودی را با استفاده از یک یکسوکننده به DC تبدیل میکند، سپس این ولتاژ DC را با استفاده از خازنها فیلتر و صاف میکند تا یک منبع تغذیه پایدار اطمینان حاصل شود. در نهایت، ولتاژ DC تنظیم شده با استفاده از مدولاسیون عرض پالس (PWM) و سوئیچهای نیمههادی (مانند IGBTها) دوباره به AC قابل تنظیم تبدیل میشود.
روشهای کنترل: VFDها از الگوریتمهای کنترلی مختلفی استفاده میکنند:
-
کنترل V/Hz (ولتاژ بر هرتز): سادهترین و رایجترین روش است که نسبت ثابت ولتاژ به فرکانس را حفظ میکند و برای کاربردهای گشتاور متغیر مانند پمپها و فنها بهترین است.
-
کنترل برداری (Vector Control – FOC): کنترل دقیقتری بر سرعت و گشتاور با استفاده از حسگرهای بازخورد موتور برای تنظیم دینامیکی ولتاژ و جریان فراهم میکند، ایدهآل برای کاربردهای با عملکرد بالا.
-
کنترل گشتاور مستقیم (DTC): یک روش کنترل پیشرفته است که پاسخ سریع به تغییرات بار و سرعت را ارائه میدهد و برای کاربردهای گشتاور ثابت پرتقاضا (مانند جرثقیلها، سنگشکنها) مناسب است.

مزایای استفاده از VFD: صرفهجویی در انرژی، کنترل دقیق، افزایش طول عمر تجهیزات
صرفهجویی در انرژی: VFDها سنگ بنای صرفهجویی در انرژی هستند، به ویژه برای بارهای گشتاور متغیر (مانند فنها و پمپها)، جایی که مصرف برق به صورت مکعبی با کاهش سرعت کاهش مییابد. این امر از هدر رفت انرژی ناشی از مکانیزمهای دریچه (دمپرها، شیرها) جلوگیری میکند. حتی برای بارهای گشتاور ثابت، VFDها صرفهجویی انرژی متناسب با کاهش سرعت را ارائه میدهند. آنها همچنین اصلاح ضریب توان ذاتی را فراهم میکنند.
کنترل دقیق سرعت و گشتاور: VFDها کنترل پیوسته و دقیق بر سرعت و گشتاور موتور را ممکن میسازند که منجر به کنترل بهتر فرآیند، کیفیت بالاتر محصول و خطاهای تولید کمتر میشود. این ویژگی برای کاربردهایی که نیاز به تنظیمات دقیق دارند، حیاتی است.
افزایش طول عمر تجهیزات و کاهش نگهداری: شتاب و کاهش سرعت روان (راهاندازی نرم) استرس مکانیکی، سایش و پارگی موتورها و تجهیزات متصل را به حداقل میرساند، خرابیها را کاهش میدهد و عمر عملیاتی را افزایش میدهد. این به معنای کاهش هزینههای نگهداری و افزایش زمان کارکرد است.
-
کاهش نویز و لرزش: عملکرد بهینه موتور منجر به کاهش نویز و لرزش میشود.
-
افزایش ایمنی: VFDها ویژگیهای حفاظتی در برابر اضافهبار، گرمای بیش از حد و شوکهای مکانیکی را ارائه میدهند که ایمنی کلی عملیاتی را بهبود میبخشد.
کاربردهای VFD در صنایع مختلف
VFDها به طور گسترده در بخشهای صنعتی که کنترل دقیق موتور و بهرهوری انرژی حیاتی هستند، استفاده میشوند.
-
پمپها و کمپرسورها: سرعت را بهینه میکنند، از هدر رفت انرژی، خشک کار کردن، نشتی و کاویتاسیون جلوگیری میکنند.
-
فنها و دمندهها: با کارکرد در سرعت بهینه، هزینههای انرژی را کاهش میدهند، از لغزش تسمه و گرفتگی فیلترها جلوگیری میکنند.
-
جرثقیلها، بالابرها و نوارهای نقاله: راهاندازی/توقف روان و کنترل شده را تضمین میکنند، از حرکات ناگهانی و افت بار جلوگیری میکنند.
-
ماشینابزار (مانند ماشینهای تراش، فرز): امکان کنترل دقیق سرعت را فراهم میکنند و دقت ماشینکاری را بهبود میبخشند.
-
سیستمهای HVAC: کنترل پیوسته بر خنکسازی و جریان هوا را امکانپذیر میسازند که منجر به صرفهجویی قابل توجهی در انرژی میشود.
-
تجهیزات تولیدی: بازوهای رباتیک، خطوط مونتاژ، ماشینآلات برش، شکلدهی و جوشکاری را تغذیه میکنند و کنترل دقیق سرعت و گشتاور را برای تولید با کیفیت بالا فراهم میآورند.
VFDها تنها به صرفهجویی در انرژی محدود نمیشوند؛ آنها به طور بنیادی نحوه استفاده از موتورهای AC را تغییر میدهند. با فعال کردن کنترل دقیق و متغیر سرعت، VFDها به موتورهای AC اجازه میدهند وظایفی را انجام دهند که قبلاً مختص موتورهای DC یا سیستمهای مکانیکی کمبازده بودند. این امر به مجموعهای از مزایا منجر میشود: فرآیندهای بهینه، کیفیت بالاتر محصول، کاهش سایش، نگهداری کمتر و افزایش ایمنی. “قانون مکعب” برای بارهای گشتاور متغیر (فنها/پمپها) صرفهجویی انرژی نامتناسب و بزرگی را برجسته میکند که VFDها را به یک سرمایهگذاری اصلی برای بازگشت سریع سرمایه تبدیل میکند.
الکترومارکت، به عنوان مرجع تخصصی در زمینه تجهیزات صنعتی، طیف وسیعی از درایوهای فرکانس متغیر (VFD) را از برندهای معتبر جهانی مانند ABB, Siemens, Schneider Electric, Danfoss, Rockwell Automation (Allen-Bradley) و Yaskawa ارائه میدهد. کارشناسان الکترومارکت با دانش فنی عمیق خود، شما را در انتخاب VFD مناسب برای نیازهای خاص صنعتیتان یاری میکنند تا از حداکثر صرفهجویی در انرژی و بهینهسازی عملکرد موتورهای خود بهرهمند شوید. این مجموعه نه تنها بهترین محصولات را تامین میکند، بلکه در مراحل نصب و راهاندازی نیز مشاوره و پشتیبانی تخصصی ارائه میدهد، تضمینکننده عملکرد بینقص و طول عمر بالای تجهیزات شما.
6. کاربردهای گسترده موتورهای الکتریکی در صنایع و زندگی روزمره
موتورهای الکتریکی اساساً در هر بخش از جامعه مدرن نقش دارند و پیشرفت و راحتی را به ارمغان میآورند.
صنعت و تولید
-
سیستمهای نوار نقاله: برای جابجایی مواد در تولید، بستهبندی و لجستیک ضروری هستند و حرکت روان و کارآمد کالاها را تضمین میکنند.
-
پمپها و کمپرسورها: به طور گسترده در تصفیه آب، صنعت نفت و گاز، فرآیندهای شیمیایی و سیستمهای HVAC برای مدیریت سیالات و هوا استفاده میشوند.
-
سیستمهای HVAC: فنها، دمندهها و کمپرسورها را در سیستمهای گرمایش، تهویه و تهویه مطبوع تغذیه میکنند و کنترل آب و هوا را در محیطهای تجاری و صنعتی تضمین میکنند.
-
رباتیک و اتوماسیون: هم موتورهای DC براشدار و هم بدون براش، همراه با سروو موتورها و استپر موتورها، برای کنترل حرکت، موقعیتیابی دقیق و عملگرها در رباتهای صنعتی، خطوط مونتاژ خودکار و ماشینابزار حیاتی هستند.
-
ماشینآلات صنعتی: جزء جداییناپذیر طیف وسیعی از ماشینآلات از جمله نوردها، سنگشکنها، آسیابها، میکسرها و تجهیزات فرآوری در بخشهای مختلف مانند فرآوری مواد غذایی، نساجی و تولیدات سنگین هستند.
لوازم خانگی
موتورهای الکتریکی نیروگاههای خاموش بسیاری از راحتیهای روزمره هستند، از جمله یخچالها، ماشینهای لباسشویی، جاروبرقیها، ماشینهای ظرفشویی و فنها. موتورهای AC، به ویژه موتورهای القایی تکفاز، به دلیل ماهیت فشرده و مقرون به صرفه بودن، در این بخش غالب هستند.
حمل و نقل
-
وسایل نقلیه الکتریکی (EVs) و هیبریدی: موتورهای DC بدون براش و موتورهای القایی AC به دلیل بازدهی بالا و توان خروجی، به طور فزایندهای برای پیشرانش استفاده میشوند.
-
پهپادها و مدلهای کنترل از راه دور: موتورهای بدون براش به دلیل نسبت توان به وزن بالا و بازدهی، ترجیح داده میشوند.
-
آسانسورها و پلهبرقیها: موتورها شتاب و کاهش سرعت روان را تضمین میکنند و راحتی و ایمنی را فراهم میآورند.
کاربردهای خاص و دقیق
-
دستگاههای پزشکی: موتورهای DC دقیق در دستگاههای تشخیصی، ابزارهای جراحی و ماشینآلات نجاتبخش ضروری هستند.
-
لوازم جانبی کامپیوتر: موتورهای DC بدون براش کوچک، هارد دیسکها، پخشکنندههای CD/DVD و فنهای خنککننده را تغذیه میکنند.
-
ساعتها و تایمرها: موتورهای سنکرون در مواردی که سرعت دقیق و نوسان کم حیاتی است، استفاده میشوند.
گستردگی کاربردها، از میکرو موتورها در ساعتها تا موتورهای چند مگاواتی برای پیشرانش دریایی ، نیاز بنیادی و جهانی به تبدیل انرژی الکتریکی به حرکت مکانیکی را نشان میدهد. دادهها نشان میدهند که انواع مختلف موتور برای وظایف مختلف بهینه هستند (به عنوان مثال، AC تکفاز برای لوازم خانگی، AC سهفاز برای صنایع سنگین، BLDC برای رباتیک دقیق، DC سری برای گشتاور راهاندازی بالا). این صرفاً یک لیست نیست؛ بلکه گواهی بر بهینهسازی مهندسی ویژگیهای موتور برای الزامات بار خاص و شرایط محیطی است.
این تنوع بر اهمیت درک جامع انواع موتور برای انتخاب و کاربرد مؤثر تأکید میکند. همچنین، نوآوری مداوم در فناوری موتور را برجسته میسازد که توسط تقاضا برای بازدهی بالاتر، اندازه کوچکتر و کنترل دقیقتر در تمام بخشها هدایت میشود. برای الکترومارکت، این به معنای نیاز به موجودی گسترده و تخصص عمیق برای پاسخگویی به نیازهای متنوع مشتریان است.
میتوانید روی تخصص و محصولات با کیفیت الکترومارکت حساب کنید. این مجموعه متعهد به ارائه بهترین موتورها برای بهینهسازی عملکرد و افزایش بهرهوری کسبوکار شما است.
7. راهنمای انتخاب موتور مناسب برای نیازهای شما
انتخاب موتور الکتریکی مناسب برای عملکرد بهینه، بهرهوری انرژی و طول عمر سیستم شما حیاتی است. این امر مستلزم بررسی دقیق چندین عامل کلیدی است.
عوامل کلیدی در انتخاب
-
توان (Power): توان مورد نیاز بر حسب اسب بخار (HP) یا کیلووات (kW) را بر اساس بار مکانیکی تعیین کنید. بزرگنمایی یا کوچکنمایی میتواند منجر به ناکارآمدی یا خرابی زودهنگام شود.
-
سرعت و گشتاور (Speed and Torque):
-
سرعت (RPM): سرعت چرخشی مورد نظر کاربرد را در نظر بگیرید. برخی کاربردها به سرعت ثابت نیاز دارند (موتورهای سنکرون، موتورهای DC شنت)، در حالی که برخی دیگر به سرعت متغیر (موتورهای القایی با VFD، موتورهای DC سری) نیاز دارند.
-
گشتاور: الزامات گشتاور راهاندازی (به عنوان مثال، بالا برای جرثقیلها، پایین برای فنها) و مشخصات گشتاور مورد نیاز در محدوده سرعت عملیاتی را ارزیابی کنید.
-
-
بازدهی (Efficiency): موتورهای با بازدهی بالاتر (مانند موتورهای AC با بازدهی بالا مطابق با استانداردهای IEEE 841، موتورهای BLDC) هزینههای عملیاتی و ردپای کربن را کاهش میدهند.
-
نوع منبع تغذیه (Power Supply Type): در دسترس بودن توان AC یا DC، دستهبندی اصلی موتور را تعیین میکند.
-
محیط عملیاتی (Operating Environment): عواملی مانند دما، رطوبت، گرد و غبار و مواد خورنده بر نوع محفظه موتور مورد نیاز (مانند Open Drip Proof (ODP)، Totally Enclosed Fan Cooled (TEFC)، Totally Enclosed Non-Ventilated (TENV)) تأثیر میگذارند.
-
نیازهای کنترلی (Control Requirements):
-
برای کنترل دقیق سرعت، موقعیت یا گشتاور، موتورهای سازگار با سیستمهای کنترل پیشرفته مانند VFDها (برای موتورهای AC) یا کنترلکنندههای الکترونیکی (برای موتورهای BLDC) را در نظر بگیرید.
-
کاربردهای سادهتر ممکن است با راهاندازی مستقیم یا کنترلهای سرعت پایه کافی باشند.
-
-
هزینه و نگهداری (Cost and Maintenance): هزینه اولیه خرید را با هزینههای عملیاتی و نگهداری بلندمدت متعادل کنید. موتورهای بدون براش، اگرچه معمولاً در ابتدا گرانتر هستند، اما در طول عمر خود نگهداری کمتری دارند.
-
استانداردها (Standards): رعایت استانداردهای صنعتی مانند NEMA (انجمن ملی تولیدکنندگان برق) یا IEC (کمیسیون بینالمللی الکتروتکنیک) برای ابعاد فریم، طبقهبندی عملکرد و انواع محفظه، سازگاری و قابلیت اطمینان را تضمین میکند.
هیچ عامل واحدی “بهترین” موتور را تعیین نمیکند. در عوض، تعامل پیچیدهای بین توان، سرعت، گشتاور، بازدهی، نیازهای کنترلی و شرایط محیطی وجود دارد. به عنوان مثال، نیاز به گشتاور راهاندازی بالا ممکن است به یک موتور DC سری اشاره کند، اما اگر سرعت ثابت نیز مورد نیاز باشد، یک موتور DC کمپوند یا یک موتور AC با VFD ممکن است انتخاب بهتری باشد. به همین ترتیب، تمایل به بازدهی بالا و نگهداری کم اغلب منجر به انتخاب موتورهای BLDC یا AC با VFD میشود، با وجود هزینههای اولیه بالاتر. “قانون مکعب” برای VFDها در بارهای گشتاور متغیر نشان میدهد که چگونه یک تغییر به ظاهر کوچک در سرعت میتواند منجر به صرفهجویی چشمگیر در انرژی شود و VFDها را به یک ملاحظه حیاتی برای هزینههای عملیاتی بلندمدت تبدیل میکند.
این بخش فراتر از توصیفات ساده حرکت میکند و توصیههای عملی ارائه میدهد. این موضوع تأکید میکند که انتخاب موتور یک مسئله بهینهسازی چند معیاره است، نه یک جستجوی ساده. این امر ارزش الکترومارکت را به عنوان یک شریک آگاه تقویت میکند، زیرا پیمایش این مبادلات نیاز به تخصص دارد. همچنین به طور ظریفی به در نظر گرفتن کل هزینه مالکیت (TCO) به جای فقط قیمت اولیه خرید، به ویژه با فناوریهای صرفهجویی انرژی مانند VFDها، تشویق میکند.
مشاوره با متخصصین الکترومارکت
با توجه به پیچیدگی و تنوع موتورهای الکتریکی، مشاوره با متخصصان باتجربه به شدت توصیه میشود.
کارشناسان الکترومارکت با درک عمیق از مشخصات فنی موتورها و نیازهای گوناگون صنایع، آماده ارائه مشاوره تخصصی به شما هستند.
الکترومارکت، از انتخاب صحیح و عملکرد بینظیر تجهیزات خود اطمینان حاصل کنید.
الکترومارکت به عنوان یک منبع معتبر و تخصصی در حوزه تأمین تجهیزات اتوماسیون صنعتی، آماده ارائه خدمات جامع به شما عزیزان است. ما به شما کمک میکنیم تا بهترین تجهیزات را برای نیازهای خاص پروژه خود انتخاب کنید. خدمات ما شامل:
- مشاوره تخصصی رایگان: تیم مجرب مهندسان الکترومارکت آماده ارائه مشاورههای فنی دقیق برای انتخاب دقیقترین و مناسبترین درایو بر اساس مشخصات آسانسور شما هستند.
- تأمین و فروش: الکترومارکت تضمین میکند که شما سافت استارتر و اینورتر اصلی و با کیفیت را با بهترین قیمت و در کوتاهترین زمان ممکن دریافت خواهید کرد.
- پشتیبانی فنی و خدمات پس از فروش: حتی پس از خرید، میتوانید روی پشتیبانی فنی و خدمات پس از فروش ما برای نصب، راهاندازی، عیبیابی و رفع مشکلات احتمالی حساب کنید.
- منابع آموزشی و مقالات تخصصی: برای گسترش دانش خود در زمینه درایوها، PLC ها، HMI ها و دیگر تجهیزات صنعتی، میتوانید به طور منظم به وبلاگ الکترومارکت سر بزنید و از مقالات آموزشی ما بهرهمند شوید.
 تماس با ما – الکترومارکت
تماس با ما – الکترومارکت
 الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست.
الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست. دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷
دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷ تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴
تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴ وبسایت:
وبسایت:  در دسترس برای مشاوره رایگان
در دسترس برای مشاوره رایگان