
راهنمای جامع استفاده از درایو Rich Ei-650 در تابلوهای آسانسوری
ارائه شده توسط الکترومارکت

درایوهای کنترل سرعت، قلب تپنده سیستمهای آسانسور مدرن به شمار میروند و نقش حیاتی در افزایش کارایی، ایمنی و راحتی سفر ایفا میکنند. درایو Rich Ei-650، به عنوان یکی از محصولات برجسته در زمینه اینورترها، قابلیتهای چشمگیری را برای کاربردهای آسانسوری ارائه میدهد. این راهنمای جامع از الکترومارکت، به شما کمک میکند تا با جزئیات فنی و نحوه برنامهریزی این درایو آشنا شوید و از حداکثر پتانسیل آن در تابلوهای آسانسوری بهرهبرداری کنید.
در الکترومارکت، ما مفتخریم که طیف وسیعی از اینورترهای با کیفیت از جمله درایو Rich Ei-650 را همراه با پشتیبانی فنی و مشاورههای تخصصی به شما ارائه دهیم. برای کسب اطلاعات بیشتر در مورد سایر مدلهای درایو و انتخاب بهترین گزینه برای نیازهای خاص خود، میتوانید به بخش مقالات وبلاگ الکترومارکت مراجعه کرده و مطالب مفیدی را مطالعه کنید.

مقدمه: آشنایی با درایو Rich Ei-650
شرکت Rich Electric، تولیدکننده مدلهای مختلف درایوهای کنترل سرعت از جمله Ei-650، Ei-550 و Ei-450 است. در این راهنما، تمرکز ما بر روی چگونگی برنامهریزی و کاربرد یک درایو Rich Ei-650 در یک تابلوی آسانسوری خواهد بود. با توجه به اهمیت مسائل ایمنی در آسانسور، اکیداً توصیه میشود که بهکارگیری این درایو در تابلوهای تجاری، با رعایت کامل نکات ایمنی و مطالعه دقیق راهنمای اصلی درایو مورد نظر انجام شود.
درایو Rich Ei-650 تنها برای موتورهای القایی آسنکرون قابل استفاده است و قابلیت نصب کارت انکودر یا کنترل Loop Closed (حلقه بسته) را ندارد. این ویژگی، آن را برای بسیاری از کاربردهای آسانسوری استاندارد مناسب میسازد.
همچنین جهت آشنایی بیشتر با انواع درایوها، توصیه میکنیم بخش راهنمای کامل اینورتر و درایوها در وبلاگ الکترومارکت را مطالعه نمایید.
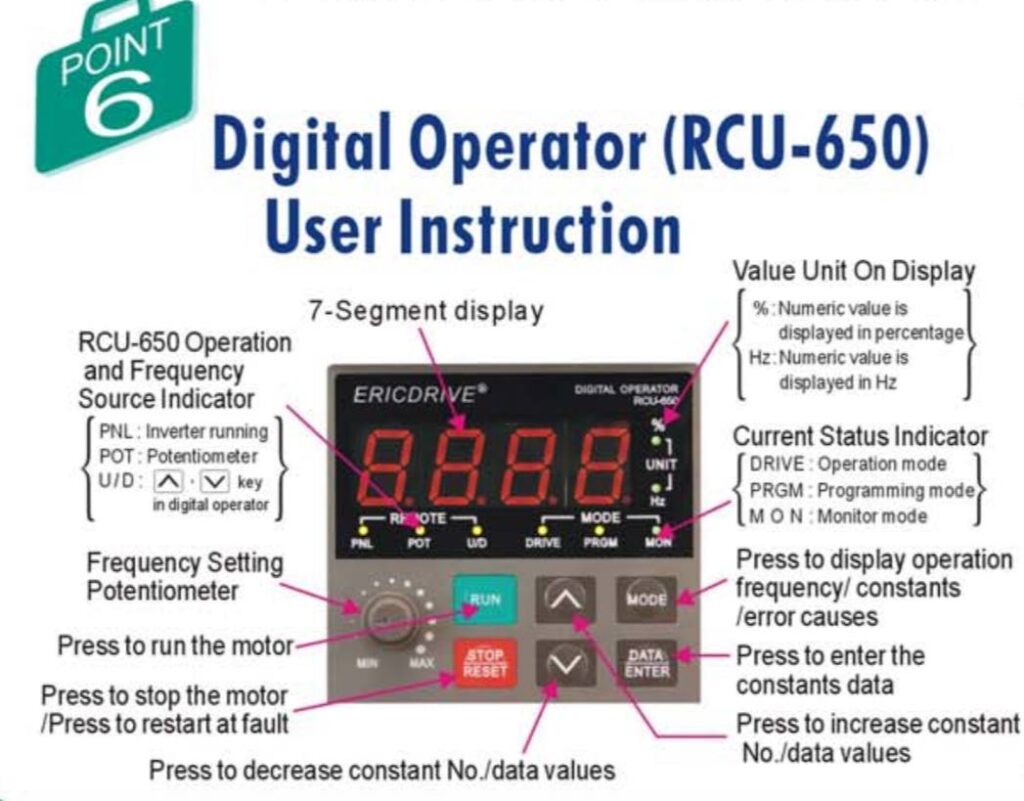
معرفی سختافزار و کار با کیپد درایو Rich Ei-650
آشنایی با اجزای سختافزاری و نحوه تعامل با کیپد، اولین گام برای برنامهریزی و راهاندازی درایو Rich Ei-650 است. کیپد این درایو، واسط کاربری اصلی برای تنظیم پارامترها و کنترل عملیات است.
چگونگی کار با کیپد در درایو Rich Ei-650
چندین کلید بر روی کیپد این درایو وجود دارد که هر یک وظیفه خاصی را بر عهده دارند:
- کلید Run: برای استارت کردن موتور استفاده میشود.
- کلید STOP: برای توقف موتور استفاده میشود.
- کلیدهای جهت بالا و پایین: در حالت عادی برای افزایش و کاهش سرعت و در حالت برنامهریزی برای حرکت بین پارامترها یا تغییر مقادیر آنها استفاده میشوند.
- کلید Reset: برای بازنشانی کردن خطاهای (فالتهای) رخ داده در درایو به کار برده میشود.
- کلید Mode: برای وارد شدن به منوی پارامترها استفاده میشود.
- کلید DATA: برای وارد شدن به یک پارامتر و برای ذخیره (Save) کردن مقدار پارامتر استفاده میگردد.
مثال عملی برای تغییر پارامتر: برای تغییر پارامتر u-01، مراحل زیر را دنبال کنید:
- ابتدا کلید Mode را در زمانی که موتور در حال توقف است، فشار دهید. عبارت “H-Gu” روی نمایشگر ظاهر میگردد.
- با کلیدهای جهت بالا یا پایین در بین پارامترها حرکت کنید تا به u-01 برسید.
- کلید DATA را فشار دهید. عدد 0 یا 1 ظاهر خواهد شد.
- با کلید بالا یا پایین مقدار این عدد را تغییر دهید.
- دوباره DATA را فشار دهید تا مقدار جدید ذخیره گردد.
نکته مهم: در حالت عادی، شما فقط امکان دسترسی به پارامترهای گروه H-Gu و u-01 تا u-26 را دارید. اگر نیاز باشد که پارامترهای گروههای A تا D را تغییر دهید، باید ابتدا پارامتر u-25 را Enter کنید تا پارامتر A-00 ظاهر گردد. با این کار، امکان دسترسی به دیگر پارامترها ایجاد خواهد شد.
.
ترمینالهای فرمان (کنترل) درایو Rich EI-650
این ترمینالها عمدتاً ورودیهای دیجیتالی هستند که برای ارسال فرمانهای مختلف به درایو استفاده میشوند.
-
F (Forward – راستگرد):
-
کاربرد: با اتصال این ترمینال به ترمینال مشترک (COM)، درایو فرمان حرکت موتور در جهت راستگرد را دریافت میکند. در آسانسور، این معمولاً به معنی حرکت به سمت بالا است.
-
نکته: برای عملکرد صحیح، ورودیهای F و R نباید همزمان فعال شوند.
-
-
R (Reverse – چپگرد):
-
کاربرد: با اتصال این ترمینال به ترمینال مشترک (COM)، درایو فرمان حرکت موتور در جهت چپگرد را دریافت میکند. در آسانسور، این معمولاً به معنی حرکت به سمت پایین است.
-
نکته: برای عملکرد صحیح، ورودیهای F و R نباید همزمان فعال شوند.
-
-
RES (Reset – ریست):
-
کاربرد: با اتصال این ترمینال به ترمینال مشترک (COM)، خطاهای فعلی درایو ریست میشوند. این عملکرد معمولاً زمانی استفاده میشود که خطایی رخ داده و پس از رفع آن، نیاز به راهاندازی مجدد درایو وجود دارد.
-
نکته: قبل از ریست کردن خطا، حتماً علت آن را برطرف کنید. در غیر این صورت، خطا مجدداً ظاهر خواهد شد.
-
-
S1, S2, S3 (Multi-function Inputs):
-
کاربرد: این سه ترمینال ورودی چندمنظوره هستند که میتوان آنها را در برنامهریزی درایو برای عملکردهای مختلفی تعریف کرد. یکی از رایجترین کاربردهای آنها، تنظیم سرعتهای ثابت مختلف برای آسانسور است.
-
مثال: با فعال کردن ترکیبی از این سه ترمینال، میتوانید تا ۷ سرعت ثابت مختلف را برای درایو تعریف کنید. برای مثال:
-
S1 روشن: سرعت ۱
-
S2 روشن: سرعت ۲
-
S1 و S2 روشن: سرعت ۳
-
… و به همین ترتیب تا ۷ حالت مختلف.
-
-
-
COM (Common – مشترک):
-
کاربرد: این ترمینال، نقطه مشترک برای تمام ورودیهای دیجیتال است. تمامی فرمانها (مانند F, R, RES, S1, S2, S3) با اتصال به این ترمینال فعال میشوند.
-
نکته: بسته به نوع تنظیمات درایو، این ترمینال میتواند به ولتاژ مثبت (+۲۴V) یا منفی (0V) مدار فرمان متصل شود.
-
اگر در هر مرحله از نصب یا برنامهریزی درایو Rich Ei-650 با مشکلی روبرو شدید، میتوانید با کارشناسان ما در الکترومارکت تماس بگیرید تا شما را راهنمایی کنند.
نکات مهم در سیمکشی فرمان
-
جداسازی کابلها: کابلهای فرمان را از کابلهای قدرت (ورودی و خروجی موتور) جدا کنید تا از تداخل نویز الکتریکی جلوگیری شود.
-
شیلد کردن کابلها: برای کاهش نویز، توصیه میشود از کابلهای شیلددار برای سیمکشی مدار فرمان استفاده کنید.
-
نوع ورودی: درایو Rich EI-650 دارای یک دیپ سوئیچ برای تنظیم نوع ورودیهای دیجیتال (PNP یا NPN) است. قبل از سیمکشی، از مطابقت این تنظیمات با تابلو فرمان خود اطمینان حاصل کنید.
کدهای خطای رایج درایو Rich Ei-650
-
OC (Over Current):
-
توضیح خطا: این خطا به دلیل اضافه جریان یا اتصال کوتاه در خروجی درایو رخ میدهد.
-
دلایل احتمالی:
-
نقص در موتور یا کابلهای ارتباطی.
-
اتصال کوتاه در موتور یا کابلها.
-
بار ناگهانی و سنگین روی موتور.
-
خرابی در مدارات قدرت داخلی درایو.
-
-
-
OU-1, OU-2, OU-3 (Over Voltage):
-
توضیح خطا: این کدها نشاندهنده اضافه ولتاژ هستند که معمولاً در زمان کاهش سرعت (Deceleration) موتور اتفاق میافتد.
-
دلایل احتمالی:
-
مدت زمان کاهش سرعت بسیار کوتاه است.
-
بار اینرسی (Inertia Load) موتور زیاد است و انرژی تولیدی توسط موتور به درایو بازمیگردد.
-
ولتاژ ورودی درایو بیش از حد مجاز است.
-
مقاومت ترمز نصب یا فعال نشده است.
-
-
-
OV (Over Voltage):
-
توضیح خطا: خطا به دلیل افزایش ولتاژ داخلی درایو رخ میدهد.
-
دلایل احتمالی:
-
ولتاژ ورودی نامتعادل یا بیش از حد مجاز.
-
خرابی مدار ترمز.
-
-
-
UU (Under Voltage):
-
توضیح خطا: این خطا به دلیل کاهش ولتاژ داخلی درایو رخ میدهد.
-
دلایل احتمالی:
-
قطع شدن یا افت ولتاژ در برق ورودی.
-
قطع شدن یکی از فازهای ورودی (در مدلهای سه فاز).
-
خرابی در مدارات قدرت داخلی درایو.
-
-
-
OH (Over Heat):
-
توضیح خطا: این خطا نشاندهنده افزایش دمای داخلی درایو است.
-
دلایل احتمالی:
-
محیط نصب درایو بیش از حد گرم است.
-
فن خنککننده درایو مسدود یا خراب شده است.
-
بار موتور بیش از حد مجاز است.
-
-
-
Ot-1 (Over Torque):
-
توضیح خطا: این خطا به دلیل اضافه گشتاور یا جریان بیش از حد در خروجی درایو رخ میدهد.
-
دلایل احتمالی:
-
بار مکانیکی روی موتور بیش از حد مجاز است.
-
زمان شتابگیری (Acceleration) درایو بسیار کوتاه تنظیم شده است.
-
پارامترهای مربوط به اضافه گشتاور به درستی تنظیم نشدهاند.
-
-
-
OL-r (Brake Resistor Overload):
-
توضیح خطا: خطا به دلیل اضافه بار و جریان بیش از حد مقاومت ترمز رخ میدهد.
-
دلایل احتمالی:
-
مقاومت ترمز برای کاربرد مورد نظر ضعیف است.
-
زمان ترمزگیری (Braking Time) بیش از حد کوتاه است.
-
مقاومت ترمز به درستی نصب یا تنظیم نشده است.
-
-
-
GF (Ground Fault):
-
توضیح خطا: این خطا نشاندهنده خطای ارت فالت (Earth Fault) یا اتصال به زمین است.
-
دلایل احتمالی:
-
نقص در عایقبندی موتور یا کابلهای رابط بین درایو و موتور.
-
اتصال بدنه در موتور یا کابلها.
-
-
-
CPFO, CPF2, CPF8 (CPU/Main Board Fault):
-
توضیح خطا: این کدها نشاندهنده مشکلات سختافزاری در برد اصلی درایو یا سنسورهای جریان هستند.
-
دلایل احتمالی:
-
خرابی در سنسورهای جریان داخلی درایو.
-
نقص در مدارات پردازنده (CPU) درایو.
-
این نوع خطا معمولاً نیاز به تعمیرات تخصصی دارد.
-
-
-
E17 (Keypad Fault):
-
توضیح خطا: این خطا مربوط به مشکل در کلیدهای روی کیپد است.
-
دلایل احتمالی:
-
خرابی مکانیکی یا الکترونیکی در کیپد.
-
-
-
nOff (Emergency Stop):
-
توضیح خطا: این خطا نشاندهنده توقف اضطراری درایو توسط ورودیهای خارجی است.
-
دلایل احتمالی:
-
فشار دادن دکمه توقف اضطراری.
-
فعال شدن یکی از سنسورهای ایمنی که به ورودی درایو متصل است.
-
مشکل سختافزاری در یکی از ورودیهای ایمنی.
-
-
-
CPFO (External Fault):
-
توضیح خطا: این خطا معمولاً به دلیل مشکلات سختافزاری در برد اصلی درایو رخ میدهد.
-
دلایل احتمالی:
-
نقص در یکی از مدارهای داخلی.
-
خرابی سنسورها یا قطعات الکترونیکی.
-
-
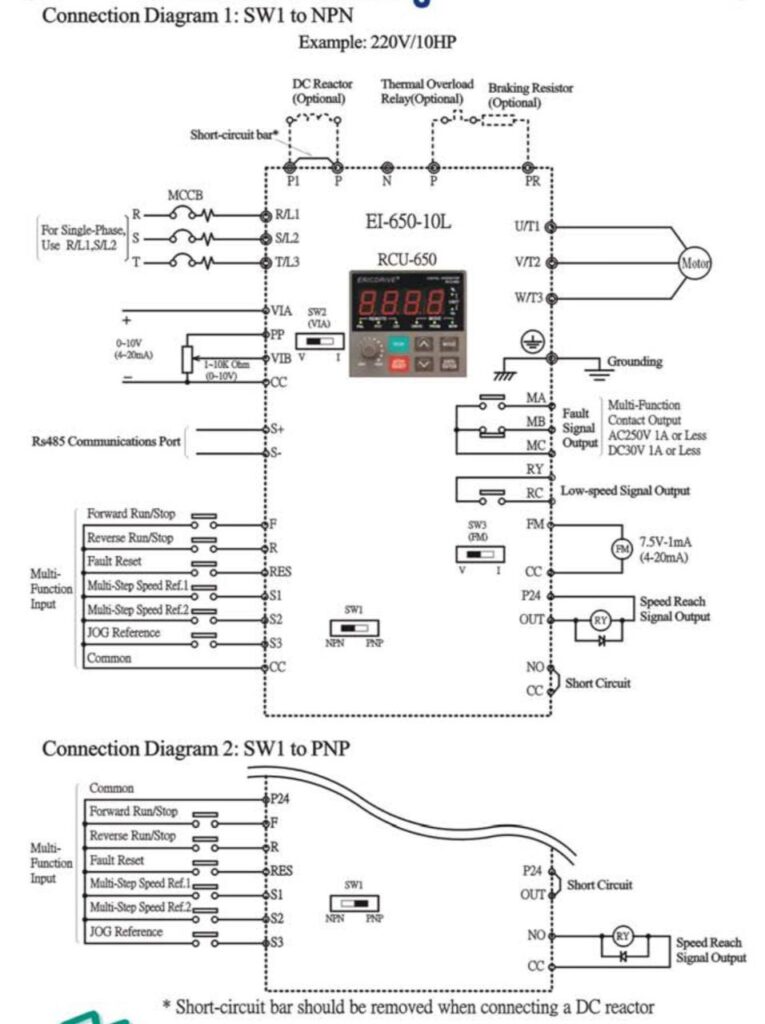
راهنمای سیمکشی درایو Rich Ei-650
سیمکشی صحیح و دقیق درایو، کلید عملکرد بهینه و جلوگیری از خطاهای احتمالی است. برای این درایو، دو نوع سیمکشی اصلی وجود دارد: مدار قدرت و مدار کنترل.
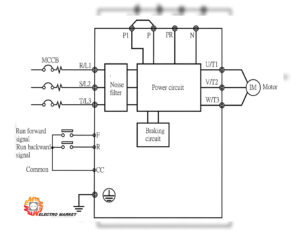
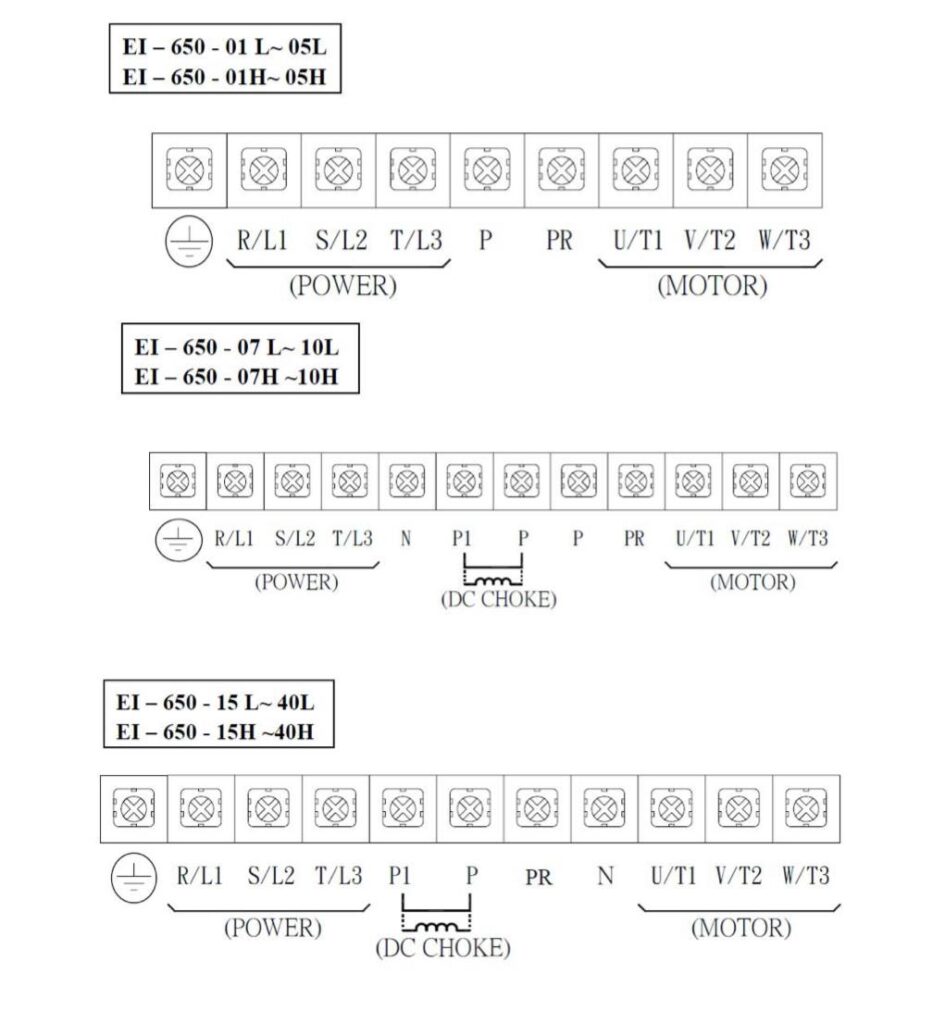
۱. سیمکشی مدار قدرت
این بخش شامل اتصالات اصلی برق ورودی و خروجی به موتور است.
-
ورودی برق (R, S, T):
-
توضیح: این ترمینالها برای اتصال برق ورودی سه فاز به درایو هستند.
-
نکته مهم: از کابلهای مناسب با سطح مقطع کافی برای تحمل جریان نامی درایو استفاده کنید. همچنین، برای جلوگیری از آسیبهای ناشی از نوسانات، حتماً از فیوز یا کلید مینیاتوری مناسب در مسیر ورودی استفاده کنید.
-
-
خروجی به موتور (U, V, W):
-
توضیح: این ترمینالها درایو را به موتور آسانسور متصل میکنند.
-
نکته مهم: طول کابل بین درایو و موتور باید تا حد امکان کوتاه باشد. برای فواصل طولانی، از فیلترهای خروجی (Output Reactors) استفاده کنید تا از آسیب دیدن موتور و درایو جلوگیری شود.
-
-
مقاومت ترمز (B1, B2):
-
توضیح: این ترمینالها برای اتصال مقاومت ترمز هستند که در هنگام کاهش سرعت موتور، انرژی اضافه را دفع میکند.
-
نکته مهم: مقاومت ترمز باید متناسب با توان درایو و شرایط کارکرد آسانسور انتخاب شود. عدم استفاده یا استفاده از مقاومت نامناسب میتواند منجر به خطای OU (اضافه ولتاژ) شود.
-
۲. سیمکشی مدار کنترل
این بخش شامل اتصالات فرمان درایو به تابلو فرمان آسانسور است.
-
ترمینالهای دیجیتال (F, R, RES, S1, S2, S3):
-
F و R: برای فرمان حرکت آسانسور به ترتیب در جهت راستگرد و چپگرد.
-
RES: برای ریست کردن خطاهای درایو.
-
S1 تا S3: برای انتخاب سرعتهای مختلف (تا ۷ سرعت ثابت قابل برنامهریزی).
-
نکته مهم: برای جلوگیری از تداخل نویز، کابلهای مدار کنترل را جدا از کابلهای مدار قدرت سیمکشی کنید.
-
-
ترمینالهای آنالوگ:
-
توضیح: این ترمینالها برای ورودیهای ولتاژ (0-10V) و جریان (4-20mA) جهت کنترل سرعت درایو استفاده میشوند.
-
گروهبندی اصلی پارامترها در درایو Rich Ei-650
درایو Rich Ei-650 پارامترهای خود را در گروههای مختلفی دستهبندی کرده است تا دسترسی و مدیریت آنها آسانتر باشد. جدول زیر، گروههای اصلی پارامترها را به همراه کاربرد مختصر آنها نشان میدهد:
| گروه پارامترها | کاربرد |
| H-Gu | تنظیمات اولیه و پیشفرض |
| u-01 تا u-26 | پارامترهای اصلی و بازگشت به تنظیمات کارخانه، سرعتهای Preset |
| A-00 تا A-85 | تعریف ورودی و خروجیهای دیجیتال و آنالوگ |
| b-00 تا b-94 | ترمز DC، ورودیهای آنالوگ، و سایر تنظیمات |
| C-00 تا C-66 | فرکانس کریر، مقاومت ترمز، و تنظیمات مرتبط |
| d-00 تا d-94 | پارامترهای موتور و اتوتیونینگ |
| E-00 تا E-13 | پارامترهای مرتبط با شتاب مثبت و منفی (Acceleration/Deceleration) |
| F-01 تا F-92 | پارامترهای حفاظت موتور و درایو |
| H-00 تا H-36 | تنظیمات مرتبط با عملکرد کیپد و نمایشگر |
| L-00 تا L-94 | پارامترهای ارتباط سریال (مانند Modbus RTU) |
توضیح پارامترهای کلیدی درایو Rich Ei-650 برای کاربرد آسانسوری
قصد داریم یک درایو Rich Ei-650 را برای کاربرد در یک تابلوی آسانسوری برنامهریزی کنیم. در این سناریو، سعی بر آن است که از ورودیهای آنالوگ، تا جای ممکن، استفاده نکنیم و از ورودیهای دیجیتال برای فرمان حرکت و برای انتخاب سرعت بهره بگیریم.
در یک تابلوی آسانسوری حداقل به دو سرعت Fast (سریع) و Slow (کند) برای حرکت عادی آسانسور و یک سرعت متوسط برای مواقعی که سرویسکار آسانسور قصد بازرسی از چاهک آسانسور را دارد، نیاز داریم. هر تابلوی آسانسوری دارای یک کنترلر جداگانه است که وضعیت سنسورهای ورودی و شستیهای موجود در کابین و راهرو و همچنین وضعیت سیستم ایمنی آسانسور را در ورودیهای خودش دریافت میکند و بر اساس آن، به درایو و موتور و همچنین به ترمز روی موتور فرمان میدهد.
بر اساس نوع برنامهریزی که در کنترلر بار شده، سرعت حرکت موتور تعیین میگردد و فرمان حرکت، فرمان کاهش سرعت و فرمان ایستادن از طریق کنترلر به درایو داده میشود. بنابراین، برخی از پارامترها که به عملکرد درایو در مورد مثال عملی ما ارتباط ندارد، توضیح داده نمیشود.
پارامترهای گروه H-Gu
پارامترهای H-Gu، Gu-1، Gu-2، و Gu-4 در این گروه قرار دارند. پارامتر H-Gu شامل تاریخچهای از پنج تا از آخرین پارامترهایی است که تغییر دادهاید و ممکن است در برخی موارد کاربرد داشته باشد. جدول زیر، سایر پارامترها را توضیح میدهد:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| Gu-1 | شتاب مثبت و شتاب منفی تغییر سرعت به طور اتوماتیک یا به صورت دستی تنظیم گردد. (اگر به پارامترهای u-07 و u-08 که شتاب مثبت و شتاب منفی هستند، مقدار میدهید، Gu-1 باید صفر باشد.) | |
| Gu-2 | 2 | نحوه جبران گشتاور به چه شکلی اجرا گردد. (2=Vector Control+tune) اگر این پارامتر را بر روی صفر قرار دهید، جبران گشتاور نخواهیم داشت. اگر بر روی 1 و 3 تنظیم گردد نیز جبران گشتاور به همراه اتوتیون یا حالت صرفهجویی در انرژی خواهد بود. به این دلیل که ما قصد داریم از روش کنترل برداری (Control Vector) و به همراه اتوتیون استفاده کنیم، جبران گشتاور را در پارامتر Gu-2 مساوی 2 قرار میدهیم. |
| Gu-4 | نحوه پیکربندی ورودیهای دیجیتال را در چند کاربرد مختلف نشان میدهد. (این پارامتر را در همان مقدار پیشفرض کارخانه یعنی صفر نگه دارید تا ورودیها به صورتی که در راهنمای اصلی درایو نشان داده شده است، اختصاص پیدا کند.) |
پارامترهای گروه u
مرجع فرمان درایو، مرجع سرعت، بازگشت به تنظیمات کارخانه، شتاب مثبت و منفی، الگوی f/v، روش کنترلی درایو و سرعتهای پیش تنظیم (Preset Speeds)، در این گروه جای گرفتهاند.
فرمان درایو:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| u-01 | مرجع فرمان درایو. اگر u-01 را مساوی 1 قرار دهید، کنترل درایو از طریق کلیدهای Run و Stop و پتانسیومتر روی کیپد یا کلیدهای جهت بالا و پایین برای افزایش و کاهش سرعت خواهد بود. این روش در آسانسورها کاربردی ندارد و چه بسا خطرناک نیز میباشد. برای تابلوهای آسانسوری، u-01 را مساوی صفر قرار دهید تا کنترل درایو از طریق ترمینالهای ورودی F و R و VIA و … انجام شود. در این حالت، کنترلر آسانسور با دادن فرمان به ورودیهای درایو، آن را کنترل میکند. |
سرعت درایو:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| u-02 | 1 | مرجع سرعت درایو را مشخص میکند. اگر u-02=0 باشد، از پتانسیومتر موجود بر روی کیپد برای تنظیم سرعت استفاده میشود (در این حالت باید u-01=1 باشد). اگر میخواهید سرعت را از طریق ورودیهای آنالوگ VIA و VIB تنظیم کنید، u-02 را مساوی 1 یا 2 قرار دهید. اگر از کلیدهای سمت بالا و پایین روی کیپد و کلید Enter برای کنترل سرعت و کاهش یا افزایش آن استفاده میکنید، u-02 را مساوی 3 قرار دهید. در این راهنما، چون ما قصد استفاده از ورودیهای 1S و 2S و 3S برای انتخاب سرعتهای پیشتنظیم را داریم، هیچکدام از انتخابهای بالا، مناسب نیستند، ولی u-02 را مساوی 1 قرار میدهیم؛ زیرا در مراحلی از کار به VIA که ورودی آنالوگ A است، احتیاج داریم. |
| u-03 | فرکانس خروجی=0 | مقداری که روی صفحه نمایش در حال کار نشان داده میشود. |
بازگشت به تنظیمات کارخانه: پارامتر u-05 برای تغییر پارامترها به تنظیمات کارخانهای به کار میرود. مقدار u-05 در حالت عادی بر روی صفر قرار دارد. اگر به هر دلیلی نیاز باشد که کلیه پارامترهای درایو Rich Ei-650 را به مقادیر پیشفرض (Default) تغییر دهید، مقدار پارامتر u-05 را بر روی عدد 3 قرار دهید. اگرچه اعداد 1 و 2 نیز میتواند پارامترها را به مقادیر کارخانهای تغییر دهد، ولی u-05=3 پارامترهای استانداردتری دارد. اگر میخواهید جدول خطاهای ثبت شده در درایو را پاک کنید، مقدار عدد 4 را در u-05 تنظیم کنید.
چند پارامتر دیگر از گروه u:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| u-07 (ACC) | 3 sec | شتاب اصلی مثبت. مدت زمانی است که طول میکشد تا سرعت از صفر به مقدار ماکزیمم خودش برسد. |
| u-08 (Dec) | 3 sec | شتاب اصلی منفی. مدت زمانی است که فرکانس خروجی درایو یا سرعت، از مقدار ماکزیمم خودش به مقدار مینیمم یا صفر خواهد رسید. |
| u-09 | 50 Hz | حداکثر فرکانس خروجی درایو. |
| u-14 | 3 | روش کنترلی درایو (f/v). منحنی f/v یا تغییرات ولتاژ نسبت به فرکانس میتواند یک منحنی خطی ثابت باشد یا میتواند متغیر باشد. امکان جبران ولتاژ در ابتدای حرکت موتور از سرعت صفر وجود دارد و میتوان منحنی f/v را به صورت دلخواه، مقداردهی نمود. به دلیل اینکه در این راهنما، قصد استفاده از روش کنترل برداری (Vector Control) را داریم، مقدار u-14 را مساوی 3 قرار میدهیم. مقدار u-14 را برای بارهای با گشتاور ثابت مثل نوار نقاله و بالابر و … میتوانید بر روی f/v=0 (ثابت) قرار دهید. برای آسانسور و امثال آنکه دارای گشتاور راهاندازی زیاد و گشتاور ثابت در زمان حرکت است، مقادیر 2 و 3 قابل کاربرد است. برای پمپها و فنها، استفاده از روش Dynamic=5 توصیه میگردد. روش f/v ثابت =0 برای جاهایی که چندین موتور را همزمان به یک درایو وصل میکنند نیز کاربرد دارد. |
| u-18 | 5 Hz | سرعت (Slow) کم برای پیادهروی. |
| u-19 | 45 Hz | سرعت زیاد (Fast) سرعت نامی. |
| u-20 | سرعت 3. | |
| u-21 | 20 Hz | سرعت 4، سرعت بازرسی Medium. |
| u-22 | سرعت 5. | |
| u-23 | سرعت 6. | |
| u-24 | سرعت 7. |
نکته: پارامترهای u-18 تا u-24 سرعتهای انتخابی توسط سه ورودی 1S، 2S و 3S را تعریف میکنند. برای سرعت کم، ورودی 1S را تعیین کردهایم. 2S برای سرعت زیاد و 3S برای سرعت متوسط خواهد بود.
جدول رابطه بین ورودیهای 1S و 2S و 3S با سرعت انتخابی:
| S1 | S2 | S3 | سرعت | پارامتر مرتبط |
| سرعت صفر (توقف) | – | |||
| 1 | سرعت 1 | u-18 | ||
| 1 | سرعت 2 | u-19 | ||
| 1 | 1 | سرعت 3 | u-20 | |
| 1 | سرعت 4 | u-21 | ||
| 1 | 1 | سرعت 5 | u-22 | |
| 1 | 1 | سرعت 6 | u-23 | |
| 1 | 1 | 1 | سرعت 7 | u-24 |
برای دستیابی به جدول بالا، باید ورودیهای 1S و 2S و 3S در پارامترهای A-14 و A-15 و A-16 به عنوان ترمینالهای انتخاب سرعت، معرفی شده باشند. با توجه به تنظیمات، میتوانید ورودی 1S را به عنوان ورودی سرعت Slow، ورودی 2S را برای سرعت Fast و همچنین ورودی 3S را به عنوان ورودی سرعت متوسط برای مواقع بازرسی از آسانسور در نظر بگیرید.
پارامترهای گروه A
پارامترهای این گروه برای معرفی ترمینالهای ورودی و رلههای خروجی به کار گرفته میشود. چند تا از مهمترین پارامترهای این گروه در جدول زیر معرفی میگردد:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| A-09 | 4 | ورودیهای آنالوگ VIB و VIA میتواند به عنوان ورودی دیجیتال به کار رود. |
| A-11 | 2 | ورودی F به عنوان ورودی راستگرد. |
| A-12 | 3 | ورودی R به عنوان ورودی چپگرد. |
| A-13 | 10 | ورودی Res به عنوان ورودی ریست. |
| A-14 | 6 | ورودی 1S به عنوان انتخاب سرعت 1. |
| A-15 | 7 | ورودی 2S به عنوان انتخاب سرعت 2. |
| A-16 | 8 | ورودی 3S به عنوان انتخاب سرعت 3. |
| A-17 | ورودی VIB به عنوان غیرفعال. | |
| A-18 | ورودی VIA به عنوان غیرفعال. |
پارامترهای A-30 تا A-39 مربوط به ترمینالهای خروجی درایو است:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| A-30 | 14 | تعریف رله Rc-Ry به عنوان ترمز مکانیکی موتور. رله Rc-Ry را به عنوان رله کنترل کننده ترمز به کار میگیریم. |
| A-31 | 10 | تعریف خروجی Out به عنوان خروجی فالت درایو. No-Out که یک خروجی ترانزیستوری است نیز برای نشان دادن فالت درایو به مدار کنترلی تابلو به کار میرود. |
| A-32 | 14 | تعریف رله MC-MB-MA به عنوان کنتاکتور اصلی. قصد داریم از رله خروجی MC-MB-MA به عنوان رله کنترل کننده کنتاکتورهای اصلی بین موتور و درایو استفاده کنیم. |
پارامترهای گروه B
تنظیمات مربوط به ورودیهای آنالوگ و همچنین تنظیمات ترمز DC و یک سری سرعتها و شتابها در این بخش قابل ویرایش است. از مهمترین پارامترهای این گروه میتوان b-50، b-51 و b-52 را نام برد که در پروژه ما استفاده میشود:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| b-50 | 0.3 Hz | فرکانس شروع تزریق DC در زمان توقف. |
| b-51 | 40% | مقدار درصد جریان DC نسبت به جریان نامی. مقدار جریان تزریق DC را خیلی زیاد نکنید؛ زیرا درایو فالت خواهد داد. |
| b-52 | 1 sec | مدت زمان اعمال ترمز DC. مدت زمان تزریق جریان را هم 1 ثانیه در نظر بگیرید. زمان بیش از این مقدار، باعث داغ کردن درایو میشود. |
پارامترهای گروه C
فرکانس سوئیچینگ PWM و مقدار مقاومت ترمز (Resistor Braking) در این بخش قابل تنظیم است:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| C-00 | 12 | فرکانس کریر (سوئیچینگ PWM). |
| C-01 | 2 | عملکرد ریست اتوماتیک فالت. |
| C-02 | 1 | عملکرد درایو در زمان ژنراتوری شدن موتور. |
| C-03 | 2 | تعداد ریست اتوماتیک. |
| C-04 | 1 | فعال کردن حفاظت اضافه بار (overload) برای مقاومت ترمز. |
| C-08 | بستگی به توان درایو دارد | مقدار اهمی مقاومت ترمز (اهم). |
| C-09 | بستگی به توان درایو دارد | توان مقاومت ترمز (کیلووات). |
برای درک عمیقتر و انتخاب صحیح مقاومت ترمز مناسب برای درایو خود، پیشنهاد میکنیم مقالهی جامع ما با عنوان
نحوه انتخاب مقاومت ترمز
را در وبلاگ الکترومارکت مطالعه کنید. این مقاله به شما کمک میکند تا با اصول و فاکتورهای کلیدی در انتخاب این قطعهی حیاتی بیشتر آشنا شوید.
پارامترهای گروه d
پارامترهای موتور و پارامترهای مربوط به اتوتیون، در این بخش قرار گرفته است:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| d-00 | 2 | فعال کردن اتوتیون. |
| d-01 | 120% | بهره فرکانسی لغزش موتور. |
| d-15 | از روی پلاک موتور | جریان نامی موتور (آمپر). |
| d-16 | 30% | جریان بی باری موتور (درصد). |
| d-17 | از روی پلاک موتور | سرعت موتور در بار نامی. |
ابتدا باید پارامترهای d-15 و d-16 و d-17 را وارد کنید، سپس اتوتیون انجام شود. کنتاکتور اصلی 1k و 2k در زمان اتوتیون باید به صورت دستی فشرده شود تا ارتباط بین موتور و درایو برقرار گردد. سپس از طریق تابلوی آسانسور، به درایو فرمان حرکت با سرعت متوسط بدهید تا اتوتیون گردد.
پارامترهای گروه E در درایو Rich Ei-650
پارامترهای تعیین کننده در نحوه شتابگیری و الگوی شتاب در این بخش گنجانده شده است. مهمترین پارامترهای این گروه شامل:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| E-00 | 3 sec | مدت شتاب مثبت 2. |
| E-01 | 0.5 sec | مدت شتاب منفی 2. |
| E-02 | 1 | الگوی شتاب مثبت و منفی 1. |
| E-03 | 1 | الگوی شتاب مثبت و منفی 2. |
| E-04 | 2 | انتخاب بین مقادیر مختلف شتاب. |
| E-06 | 25 | حد بالای منحنی شتاب pattern-s. |
| E-07 | 10 | حد پایین منحنی شتاب pattern-s. |
پارامترهای گروه F
پارامترهای حفاظت موتور و درایو در این قسمت است. عملکرد درایو در مقابل قطع فاز خروجی و قطع فاز ورودی، و درصد اضافه بار موتور و … که چند تای آن در جدول زیر مشاهده میشود:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| F-05 | 3 | تشخیص خطای قطع فاز خروجی در زمان کار. |
| F-07 | 8 sec | مدت مجاز اضافه بار 150 درصدی. |
| F-08 | 1 | تشخیص قطع شدن فاز ورودی. |
| F-15 | 1 | عملکرد درایو در مقابل خطای اضافه گشتاور. |
| F-16 | 150% | درصد مجاز اضافه گشتاور. |
| F-18 | 8 sec | مدت مجاز برای اضافه گشتاور. |
پارامترهای گروه H
چند تا از تنظیمات مرتبط با نمایش و نمایشگر کیپد در گروه H قرار دارد:
| پارامتر | مقدار پیشنهادی | توضیح پارامتر |
| H-10 | بر روی صفحه نمایش در زمان کار، چه پارامتری نشان داده شود. | |
| H-30 | 1 | جلوگیری از تغییر فرکانس در زمان کار توسط کیپد. |
| H-33 | 1 | غیرفعال کردن کلیدهای Run و Stop. |
| H-34 | 1 | غیرفعال کردن ایست اضطراری توسط کیپد. |
| H-36 | 1 | از تغییر پارامترهای u-01 و u-02 در زمان کار درایو جلوگیری شود. |
با استفاده از این راهنمای جامع و دقیق، میتوانید درایو Rich Ei-650 را به درستی برای کاربردهای آسانسوری برنامهریزی و راهاندازی کنید. برای اطمینان از عملکرد صحیح و بهینه سیستم، توصیه میشود همواره به راهنمای کامل و اصلی درایو نیز مراجعه نمایید.
اگر در هر مرحلهای از نصب یا برنامهریزی نیاز به کمک داشتید، تیم متخصص الکترومارکت آماده ارائه خدمات و پشتیبانی فنی به شماست. همچنین برای مطالعه مقالات بیشتر در زمینه اتوماسیون صنعتی و اینورترها، به بخش وبلاگ الکترومارکت سر بزنید.
 تماس با ما – الکترومارکت
تماس با ما – الکترومارکت الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست.
الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست. دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷
دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷  تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴
تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴ وبسایت:
وبسایت:  در دسترس برای مشاوره رایگان
در دسترس برای مشاوره رایگان