درایو Vacon NXP: کنترل قدرتمند و دقیق برای کاربردهای صنعتی
ارائه شده توسط الکترومارکت

مقدمه
درایو NXP ساخت شرکت Vacon است که برای کاربردهای Open Loop Vector و Closed Loop (در صورت نصب انکودر بر روی موتور و کارت انکودر بر روی درایو) و برای کار با موتور آسنکرون القایی مناسب میباشد. این درایو Vacon NXP، قابلیت کار با Applicationهای مختلف و بارهای متفاوت را دارا میباشد و از این نظر، یک درایو چند کاره محسوب میشود. نوع کاربری درایو میتواند از طریق نرمافزار یا از طریق تنظیمات پارامتری صورت گیرد. پارامتر 6.2S که نوع Application را تعیین میکند دارای موارد زیر میباشد:
- Application Basic (کاربرد ساده)
- Application Standard (کاربرد استاندارد)
- Control Remote/Local (کاربرد محلی / راه دور)
- Multi Step Application (کاربرد چند سرعته)
- PID Control Application (کاربرد PID)
- Multi Purpose Control (کاربرد چند منظوره)
- Fan and Pump Application (کاربرد فن و پمپ)
- Lift Application (کاربرد برای بالابر و آسانسور)
بستگی به نوع نرمافزاری که به درایو داده شده است، یکی از موارد بالا قابل انتخاب است. به طور مثال، درایوهایی که فقط برای آسانسور و بالابر طراحی میشوند، در پارامتر 6.2S دارای گزینه Lift میباشند و ممکن است سایر گزینهها در دسترس نباشد.
در این راهنما، قصد داریم نحوه کنترل یک موتور آسانسور را با استفاده از تنظیم پارامتر 6.2S بر روی کاربری Lift دنبال کنیم.
بهکارگیری این درایو برای کاربردهای تجاری و صنعتی، نیاز به مطالعه کامل و کافی در مورد تمامی جنبههای درایو و تمامی پارامترها دارد و این راهنما فقط جنبه آموزش اولیه دارد و توصیه میگردد که دوستان، برای بهکارگیری درایو در پروژههای واقعی، به مطالب این راهنما بسنده نکنند و تمامی موارد ایمنی و سایر پارامترهای درایو را نیز در نظر داشته باشند. برای اطلاعات بیشتر در مورد اصول ایمنی و نگهداری درایوها، میتوانید به مقالات وبلاگ الکترومارکت مراجعه کنید.
سخت افزار درایو Vacon NXP
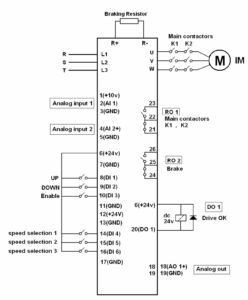
این درایو Vacon NXP، دارای یک برد قدرت و یک برد کنترلی جدا از هم است. برد کنترلی دارای چندین اسلات برای اضافه نمودن بردهای ورودی و خروجی و غیره میباشد.
برد توسعه 1OPTA شامل ترمینالهای از شماره 1 تا شماره 20 و ورودیهای آنالوگ و دیجیتال را شامل میشود و برد 2OPTA نیز از ترمینال 21 تا 26 است که خروجیهای رلهای را در خود جای داده است.
>برد توسعه 1OPTA را در اسلات A نصب کنید و برد 2OPTA را در اسلات B قرار دهید.
کارت انکودر NXOPT 4A برای اتصال انکودرهای 5 ولتی نوع ABZ و کارت انکودر NXOPT 5A به منظور اتصال انکودرهای 15 تا 24 ولتی نوع ABZ به درایو Vacon NXP قابل استفاده است. با تغییر جامپر 4X موجود روی کارت انکودر NXOPT 5A میتوان ولتاژ کاری انکودر را بین 15 یا 24 ولت تغییر داد. برای خرید انواع کارتهای توسعه و انکودر برای درایو Vacon NXP، میتوانید به فروشگاه الکترومارکت مراجعه کنید.
راهنمای ترمینالهای قدرت درایو Vacon NXP
ترمینالهای قدرت درایو Vacon NXP برای اتصال منبع تغذیه ورودی و موتور طراحی شدهاند و نقش مهمی در عملکرد ایمن و بهینه درایو دارند. در ادامه، جزئیات این ترمینالها و نکات مربوط به اتصال آنها شرح داده شده است:
ترمینالهای قدرت
-
ترمینالهای ورودی (R, S, T):
-
برای اتصال برق سهفاز (یا تکفاز در مدلهای خاص) استفاده میشوند.
-
ولتاژ ورودی معمولاً 380-400 ولت AC (یا 220 ولت برای مدلهای تکفاز) است.
-
در صورت استفاده از برق تکفاز، فاز به R و نول به T متصل میشود.
-
-
ترمینالهای خروجی (U, V, W):
-
برای اتصال به موتور سهفاز استفاده میشوند.
-
اطمینان حاصل کنید که ترتیب فازها (U, V, W) با موتور مطابقت دارد تا جهت چرخش صحیح باشد.
-
ولتاژ خروجی باید با ولتاژ نامی موتور (مانند 400V یا 690V) هماهنگ باشد. برای موتورهای دو ولتاژه، اتصال ستاره یا مثلث را بر اساس پلاک موتور تنظیم کنید.
-
-
ترمینالهای مقاومت ترمز (B1, B2):
-
برای اتصال مقاومت ترمز یا یونیت ترمز خارجی در کاربردهایی مانند آسانسور که نیاز به توقف سریع دارند.
-
پارامتر 6.7.1P را روی “Connected” تنظیم کنید تا درایو تشخیص دهد که مقاومت ترمز متصل است.
-
-
ترمینال زمین (PE):
-
برای اتصال به سیستم زمین درایو و موتور استفاده میشود.
-
اتصال صحیح زمین برای جلوگیری از خطای ارت فالت (Earth Fault) ضروری است.
-
نکات اتصال ترمینالهای قدرت
-
انتخاب کابل مناسب: از کابلهایی با سطح مقطع متناسب با جریان نامی درایو و موتور استفاده کنید. برای محاسبه دقیق، به دفترچه راهنمای درایو مراجعه کنید.
-
استفاده از وایرشو: برای اتصال محکم و ایمن، از وایرشو در ترمینالها استفاده کنید.
-
بررسی ترتیب فازها: ترتیب نادرست فازها میتواند باعث چرخش معکوس موتور یا خطای درایو شود.
-
محافظت در برابر اضافه جریان: از فیوزهای مناسب یا کلیدهای مینیاتوری (MCB) در ورودی درایو استفاده کنید.
-
فاصله کابلها: کابلهای قدرت را از کابلهای کنترلی (مانند ورودیهای دیجیتال یا انکودر) جدا کنید تا نویز الکتریکی کاهش یابد.
نکات عیبیابی
-
خطای قطع فاز ورودی/خروجی: اگر درایو خطای قطع فاز (2.8.2.2P یا 2.8.2.3P) نشان داد، اتصالات R, S, T یا U, V, W را بررسی کنید.
-
خطای ارت فالت: اطمینان حاصل کنید که ترمینال زمین (PE) بهدرستی متصل است.
-
صدای غیرعادی درایو: اگر پس از اتصال، درایو صدای مهیبی تولید کرد یا خاموش شد، اتصالات ورودی و خروجی را بازبینی کنید. ممکن است برق سهفاز به اشتباه به خروجی متصل شده باشد.
راهنمای سیمکشی درایو Vacon NXP
سیمکشی درایو Vacon NXP یکی از مراحل حیاتی در نصب و راهاندازی این درایو است که نیازمند دقت و رعایت استانداردهای الکتریکی است. این درایو معمولاً برای کنترل موتورهای سهفاز استفاده میشود و باید با توجه به ولتاژ و نوع اتصال موتور (ستاره یا مثلث) تنظیم شود. در ادامه، مراحل و نکات کلیدی سیمکشی ارائه شده است:
مراحل اصلی سیمکشی
-
بررسی ولتاژ ورودی و خروجی:
-
ترمینالهای ورودی قدرت (R, S, T) برای اتصال برق سهفاز (یا در مدلهای تکفاز، فاز و نول به R و T) استفاده میشوند.
-
ترمینالهای خروجی (U, V, W) به موتور متصل میشوند. اطمینان حاصل کنید که ولتاژ نامی موتور (مثلاً 400V یا 690V) با تنظیمات درایو مطابقت دارد.
-
برای موتورهای دو ولتاژه، از نمودار اتصالات روی پلاک موتور استفاده کنید تا اتصال ستاره یا مثلث را درست انجام دهید.
-
-
اتصال ترمینالهای ورودی و خروجی:
-
از کابلهای مناسب با سطح مقطع کافی برای جریان نامی استفاده کنید.
-
برای اتصال به ترمینالها، از وایرشو استفاده کنید تا اتصالات محکم و ایمن باشند. پس از اتصال، کابلها را بهآرامی بکشید تا از محکم بودن آنها مطمئن شوید.
-
-
اتصال انکودر (در صورت استفاده در حالت Closed Loop):
-
برای انکودرهای 5 ولتی، از کارت NXOPT 4A و برای انکودرهای 15 یا 24 ولتی، از کارت NXOPT 5A استفاده کنید.
-
جامپر 4X روی کارت NXOPT 5A را برای تنظیم ولتاژ انکودر (15V یا 24V) بررسی کنید.
-
کابلهای انکودر را از مسیرهای جدا از کابلهای قدرت عبور دهید تا نویز الکتریکی کاهش یابد.
-
-
اتصال مقاومت ترمز (در صورت نیاز):
-
ترمینالهای B1 و B2 برای اتصال مقاومت ترمز یا یونیت ترمز خارجی استفاده میشوند. این برای کاربردهایی مانند آسانسور که نیاز به توقف سریع دارند، ضروری است.
-
-
اتصالات کنترلی:
-
برد توسعه 1OPTA (ترمینالهای 1 تا 20) برای ورودیهای دیجیتال (DI) و آنالوگ (AI) استفاده میشود.
-
برد 2OPTA (ترمینالهای 21 تا 26) برای خروجیهای رلهای (RO) به کار میرود.
-
ورودیهای دیجیتال (DI1 تا DI6) برای کنترل جهت حرکت (راستگرد/چپگرد) و انتخاب سرعت استفاده میشوند.
-
نکات ایمنی در سیمکشی
-
بررسی اتصال زمین: اطمینان حاصل کنید که درایو و موتور به سیستم زمین (Earth) متصل هستند تا از خطای ارت فالت جلوگیری شود.
-
استانداردهای الکتریکی: سیمکشی باید مطابق با استاندارد IEC 60204-1 انجام شود.
-
قطع برق قبل از کار: قبل از هرگونه اتصال، برق ورودی را قطع کنید و از نبود ولتاژ با مولتیمتر مطمئن شوید.
-
محافظت در برابر اضافه جریان: از فیوزهای مناسب یا کلیدهای مینیاتوری (MCB) برای حفاظت درایو استفاده کنید.
نکات عیبیابی در سیمکشی
-
خطای قطع فاز: اگر درایو خطای قطع فاز ورودی یا خروجی نشان داد، اتصالات R, S, T و U, V, W را بررسی کنید.
-
نویز الکتریکی: در صورت بروز نویز، از کابلهای شیلددار استفاده کنید و مسیر کابلهای قدرت و کنترلی را جدا کنید.
-
اتصال نادرست: در صورت روشن نشدن درایو یا ایجاد صدای غیرعادی، اتصالات ورودی و خروجی را بازبینی کنید.
نحوه برنامهریزی درایو Vacon NXP
درایو Vacon NXP دارای هفت منوی اصلی برای برنامهریزی و پارامتردهی به درایو است. منوهای اصلی شامل:
- منوی 1M: منوی مانیتورینگ نام دارد.
- منوی 2M: اغلب پارامترهای موتور و درایو در آن قرار دارد و شامل یازده گروه اصلی از پارامترها است.
- منوی 3M: به منظور کنترل کیپد و نحوه نمایش و مرجع کنترلی درایو میباشد.
- منوی 4M: مربوط به خطای موجود بر روی درایو است.
- منوی 5M: مربوط به تاریخچه خطاهای رخ داده روی درایو میباشد.
- منوی 6M: تنظیمات اصلی روی درایو را بر عهده دارد.
- منوی 7M: تنظیمات مربوط به بردهای توسعهای همانند بردهای 1OPTA و 2OPTA و 4OPTA و 5OPTA و چند تنظیم مربوط به انکودر و … در آن قرار دارد.

کیپد Vacon NXP
کیپد موجود بر روی درایو، دارای چندین کلید است. از کلیدهای Stop و Start برای زمانی که بخواهید موتور را از طریق صفحه کلید کنترل کنید، کاربرد دارد و در کاربردهای آسانسور و … از آن استفاده نمیشود و غیر فعال است. (مرجع کنترل درایو = 3.1P)
>کلید Reset برای ریست نمودن درایو در زمانی که فالت داده است استفاده میشود.
>کلید جهت راست (→) برای اینکه در هر منو، به طرف جلو حرکت کنیم و یا زمانی که کرسر (Curser) را به طرف راست حرکت میدهیم و یا زمانی که به مد ویرایش میرویم به کار میرود.
>کلید سمت چپ (←) برای اینکه در منو به عقب حرکت کنیم و یا برای حرکت دادن کرسر به طرف چپ استفاده میشود.
از کلید Enter برای قبول کردن مقدار یک داده و تغییرات در پارامترها استفاده کنید. اگر کلید Enter را 3 ثانیه نگه دارید، حافظه مربوط به فالتها پاک میشود.
کلید Select برای انتخاب و برای برگشتن به دو صفحه قبلی که در آن قرار داشتهاید استفاده شود.
کیپد Vacon NXP به شما امکان دسترسی به هفت منوی اصلی را میدهد:
-
منوی 1M (مانیتورینگ): نمایش مقادیر خواندنی مانند فرکانس، جریان، ولتاژ، و سرعت موتور (1.1V تا 1.17V).
-
منوی 2M (پارامترها): شامل تنظیمات موتور و درایو، مانند سرعت، شتاب، و ورودی/خروجیها.
-
منوی 3M (کنترل کیپد): تنظیم نحوه نمایش و کنترل از طریق کیپد (مانند 3.1P برای انتخاب مرجع کنترلی).
-
منوی 4M (خطاها): نمایش خطای جاری درایو.
-
منوی 5M (تاریخچه خطاها): نمایش تاریخچه خطاهای قبلی.
-
منوی 6M (تنظیمات سیستم): تنظیم نوع کاربری (مانند Lift Application) و بازگشت به تنظیمات کارخانه.
-
منوی 7M (بردهای توسعه): تنظیمات مربوط به بردهای 1OPTA، 2OPTA، و انکودرها.
منوی 1M
مقادیر متغیرهای ولتاژ و جریان و توان و سرعت و گشتاور و … را میتوان در منوی 1M مشاهده نمود. جدول زیر، مقادیر متغیرها در منوی 1M را نشان میدهد. مقادیر متغیرها در منوی 1M، قابل ویرایش نیست و فقط خواندنی است یعنی شما فقط میتوانید این مقادیر را مشاهده کنید. وقتی وارد منوی 1M میشوید، متغیرهای 1.1V تا 1.17V در این منو دیده میشود.
در این حالت در LCD مربوط به Keypad در انتهای سمت چپ در سطر دوم، عبارت 1M و در سطر بعدی عبارت Monitor را خواهید دید. همچنین در سطر آخر، عبارت V1 تا V17 خواهد آمد. کلید جهت راست را فشار دهید، سطر اول 1.1V را نشان خواهد داد که فرکانس خروجی درایو است. اگر کلید جهت بالا را فشار دهید عبارت 1.2V که مقدار فرکانس مرجع است را خواهید دید. به همین ترتیب، تمامی مقادیر 1.1V تا 1.17V قابل دیدن است.
منوی 2M
منوی 2M شامل تعداد زیادی از پارامترهای موتور و درایو است که سرعتها، شتاب، ورودی و خروجیها و … را شامل میشود. منوی 2M نیز خود به یازده گروه اصلی از پارامترها تقسیم شده است.
در صفحه اصلی Keypad با کلیدهای سمت بالا و پایین طوری حرکت کنید که در سطر دوم، عبارت 2M را مشاهده کنید. در این حالت در سطر سوم عبارت Parameters و در سطح آخر، عبارت G1 تا G11 خواهد آمد. یعنی یازده گروه از پارامترها که در جدول زیر، هر گروه معرفی شده است.
پارامترهای منوی 2M
| گروه | توضیح گروه |
| G2.1 | Basic parameters |
| G2.2 | Speed control parameters |
| G2.3 | Mechanical Brake control |
| G2.4 | Drive control parameters |
| G2.5 | Motor control parameters |
| G2.6 | Input signals |
| G2.7 | Output signals |
| G2.8 | Protection parameters |
| G2.9 | پارامترهای مربوط به ریاستارت اتوماتیک |
| G2.10 | پارامترهای مربوط به برق اضطراری و باتری |
| G2.11 | پارامترهای PID در حالت CLOSED LOOP |
نکات استفاده از کیپد
-
تنظیم مرجع کنترلی: برای کاربردهای آسانسور، پارامتر 3.1P را روی 0 تنظیم کنید تا کنترل از طریق ورودیهای I/O انجام شود و کلیدهای Start/Stop غیرفعال شوند.
-
نمایشگر LCD: در حالت مانیتورینگ (1M)، عبارت “Monitor” و متغیرهای V1 تا V17 نمایش داده میشود. برای مثال، 1.1V فرکانس خروجی و 1.2V فرکانس مرجع را نشان میدهد.
-
ذخیره تغییرات: پس از تغییر پارامترها، حتماً از کلید Enter برای ذخیره استفاده کنید.
-
بازگشت به تنظیمات کارخانه: از پارامتر 6.3.1S در منوی 6M برای بازگشت به تنظیمات پیشفرض استفاده کنید.
نکات عیبیابی
-
عدم نمایش LCD: اگر صفحهنمایش کیپد روشن نمیشود، اتصالات تغذیه برد کنترلی یا خرابی کیپد را بررسی کنید.
-
عدم پاسخگویی کلیدها: مطمئن شوید که درایو در حالت قفل (Keypad Lock) نیست. برای غیرفعال کردن قفل، به منوی 3M مراجعه کنید.
مرجع فرمان درایو Vacon NXP
قبل از اینکه وارد تنظیمات منوی 2 شویم، لازم است مطلبی را یادآوری کنم.
درایوهای Vacon و بسیاری از درایوهای دیگر، طوری طراحی میشوند که بتوان از چندین مرجع کنترلی، به آنها فرمان داد. سادهترین روش کنترل یک درایو، از طریق صفحه کلید روی کیپد است. کلیدهای STOP و Start و یک ولوم کنترل سرعت بر روی کیپد، درایوها، به شما امکان حرکت دادن موتور و تنظیم سرعت را میدهد. برخی از درایوها، از طریق شبکه Fieldbus کنترل میشوند و سرعت و جهت حرکت و فرمان حرکت، از طریق شبکه به درایو داده میشود.
اما در کاربرد آسانسور که ما در نظر داریم در مورد آن صحبت کنیم، کنترل فرمان حرکت، بر عهده ورودیهای I/O موجود بر روی درایو است. پارامتر 3.1P مربوط به مرجع فرمان درایو است. اگر مقدار 3.1P = 0 قرار داده شود، فرمان حرکت و جهت حرکت، از طریق I/O تعیین خواهد شد. اگر 3.1P = 1 تنظیم شود، کنترل درایو از طریق کلیدهای روی Keypad امکانپذیر خواهد شد. اگر مقدار 3.1P = 2 باشد نیز میتوان درایو را از طریق شبکه FieldBus کنترل کرد.
CLOSED LOOP
نکته دیگر در مورد کاربرد انکودر است. این درایو را باید ابتدا به صورت OPEN LOOP برنامهریزی کنید. هنگامی که همه پارامترهای OPEN LOOP را تنظیم نمودید، با کلید رویزیون روی تابلو با سرعت رویزیون به طرف بالا و پایین، حرکت کنید. پارامترهای 7.3.2.1P و 7.3.2.2P را چک کنید تا در مورد جهت چرخش و سرعت و فرکانس اندازهگیری شده توسط انکودر مطمئن شوید. اگر مشکلی در تنظیمات OPEN LOOP نبود، آنگاه تنظیمات CLOSED LOOP را به درایو بدهید. پارامتر 2.5.1P مربوط به انتخاب حالت OPEN و CLOSE است. اگر مقدار پارامتر 2.5.1P را بر روی عدد 1 قرار داده شود، OPEN LOOP و اگر بر روی 2 تنظیم شود، حالت CLOSED LOOP انتخاب خواهد شد. جدول زیر، تنظیمات انکودر را نشان میدهد.
| پارامتر | توضیح پارامتر | تنظیم گردد |
| 7.3.1.1P | تعداد پالسهای انکودر در هر چرخش | 1024 |
| 7.3.1.2P | جهت چرخش انکودر = معکوس | NO |
| 7.3.1.3P | نرخ نمونهبرداری فیلتر انکودر | 5 msec |
| 7.3.2.1P | فرکانس خروجی اندازهگیری شده توسط انکودر | خواندنی |
| 7.3.2.2P | سرعت خروجی اندازهگیری شده توسط انکودر | خواندنی |
پارامترهای 1.1V (فرکانس خروجی) و 1.3V (سرعت موتور) نیز میتواند به شما در تنظیم انکودر کمک کند.
Basic parameters
پارامترهای گروه یک از منوی 2 (G2.1 = Basic parameters) شامل چندین پارامتر مربوط به مقادیر نامی موتور میباشد.
| پارامتر | توضیح پارامتر | تنظیم شود |
| 2.1.1P | ولتاژ نامی موتور | 400 V |
| 2.1.2P | فرکانس نامی موتور | 50 Hz |
| 2.1.3P | سرعت موتور در بار نامی (RPM) | از روی پلاک موتور |
| 2.1.4P | جریان نامی موتور (In) (A) | از روی پلاک موتور |
| 2.1.5P | Cosφ موتور | از روی پلاک موتور |
| P2.1.6 | محدود کردن جریان درایو به منظور حفاظت اضافه بار | In × 1.5 |
In جریان نامی موتور است که از روی پلاک موتور خوانده میشود.
Speed control parameters
پارامترهای گروه دو از منوی 2 (G2.2) در این گروه از پارامترها، مرجع کنترل سرعت (مرجع انتخاب سرعت)، سرعتهای کاری، شتاب مثبت و منفی و … تنظیم میشود. جدول زیر شامل مهمترین پارامترهای این گروه است.
| پارامتر | توضیح پارامتر | تنظیم شود |
| P2.2.1 | حداکثر سرعت آسانسور | 1 m/s |
| 2.2.2P | مرجع انتخاب سرعت درایو | Activity=0 |
| 2.2.4.1P | سرعت توقف = Speed 0 | |
| 2.2.4.2P | سرعت 1 = سرعت زیاد | 50 Hz |
| 2.2.4.3P | سرعت 2 = سرعت کم | 5 Hz |
| 2.2.4.4P | Speed 3 | |
| 2.2.4.5P | سرعت 4 = سرعت متوسط | 12.5 Hz |
| 2.2.4.6P | Speed 5 | |
| 2.2.4.7P | Speed 6 | |
| 2.2.4.8P | Speed 7 | |
| 2.2.4.9P | سرعت با اولویت بالا = Over ride speed | |
| 2.2.5.1P | شتاب مثبت اصلی Acceleration | 0.4 |
| 2.2.5.2P | شتاب اصلی منفی Deceleration | 0.4 |
| P2.2.5.3 | Acc increase jerk 1 | 0.9 |
| P2.2.5.4 | Acc decrease jerk 1 | 0.7 |
| P2.2.5.5 | Dec increase jerk 1 | 0.75 |
| P2.2.5.6 | Dec decrease jerk 1 | 1.1 |
اگر پارامتر 2.2.2P را بر روی activity=0 تنظیم کنید، انتخاب سرعت، توسط الگوی جدول زیر انجام خواهد شد.
در شکل زیر، منحنی حرکت آسانسور و شتاب مثبت و شتاب منفی و نقاط تغییر شتاب مشخص شده است.
مرجع انتخاب سرعت درایو Vacon NXP
یکی از پارامترهای مهم در گروه دو (G2.2) پارامتر 2.2.2P میباشد که مرجع انتخاب سرعت را مشخص میکند. اگر 2.2.2P = 6 باشد، سرعت توسط Keypad و به وسیله کلیدهای سمت بالا و پایین تغییر خواهد کرد.
اگر 2.2.2P = 5 باشد، سرعت توسط فیلدباس تعیین میشود همچنبن اگر 2.2.2P مساوی 3 یا 4 باشد، سرعت درایو توسط ورودیهای آنالوگ تعیین خواهد شد.
برای جاهایی که میخواهیم سرعت توسط DI 4, DI 5, DI 6 (ترمینالهای ورودی دیجیتال) معین شود، باید 2.2.2P = activity=0 یا 2.2.2P = binary=2 تنظیم شود.
پارامترهای 2.2.4.1P تا 2.2.4.9P سرعتهای مورد نظر و پارامترهای 2.2.5.1P تا 2.2.5.6P نیز نرخ افزایش و کاهش سرعت در طول منحنی حرکت را تعیین میکند.
جدول زیر، رابطه بین ورودیهای DI 4, DI 5, DI 6 را با سرعت انتخابی در حالتی که binary=2.2.2P است نشان میدهد.
| Speed Parameter | DI 6 | DI 5 | DI 4 |
| P2.2.4.1 | |||
| P2.2.4.2 | 1 | ||
| P2.2.4.3 | 1 | ||
| P2.2.4.4 | 1 | 1 | |
| P2.2.4.5 | 1 | ||
| P2.2.4.6 | 1 | 1 | |
| P2.2.4.7 | 1 | 1 | |
| P2.2.4.8 | 1 | 1 | 1 |
ورودی DI 4 را برای سرعت تند و ورودی DI 5 را برای سرعت کم پیادهروی و در آخر، ورودی DI 6 را برای سرعت متوسط بازرسی استفاده کنید.
منوی 2M – گروه 3
از پارامترهای گروه G2.3 برای کنترل ترمز مکانیکی روی موتور آسانسور استفاده میشود. همچنین پارامترهایی برای کنترل ترمز DC که از طریق تزریق جریان DC در سیمپیچ موتور صورت میگیرد وجود دارد. مهمترین پارامترها در این گروه اگر درایو را به صورت Open Loop بهکار ببرید شامل:
| پارامتر | پارامترهای حالت Open Loop | تنظیم شود |
| 2.3.1.1P | مقدار جریان موتور در زمان باز شدن ترمز مکانیکی | 0.2 * In |
| 2.3.1.2P | مقدار گشتاور موتور در زمان باز شدن ترمز مکانیکی | 70% |
| 2.3.1.3P | مقدار فرکانس موتور در زمان باز شدن ترمز مکانیکی | 0.5 Hz |
| 2.3.1.4P | تاخیر در باز شدن ترمز مکانیکی در استارت | 0.01 sec |
| 2.3.1.5P | فرکانس خروجی در زمان بسته شدن ترمز مکانیکی | 0.01 Hz |
| 2.3.1.6P | تاخیر زمانی در بسته شدن ترمز مکانیکی در توقف | 0.5 sec |
| 2.3.1.7P | حداکثر فرکانسی که در آن، ترمز مجاز است بسته بماند. | 2 Hz |
| 2.3.1.9P | مقدار جریان تزریقی برای ترمز DC | جریان نامی موتور |
| 2.3.1.10P | مدت زمان تزریق جریان DC در استارت | 0.8 sec |
| 2.3.1.11P | مدت زمان تزریق DC در توقف | 1 sec |
| 2.3.1.12P | فرکانس شروع تزریق DC در زمان توقف | 0.5 |
اگر درایو را به صورت Closed Loop بهکار میگیرید نیز تنظیمات جدول زیر را به کار ببرید:
| پارامتر | پارامترهای حالت Closed Loop | تنظیم شود |
| 2.3.1.1P | مقدار جریان موتور در زمان باز شدن ترمز مکانیکی | |
| 2.3.1.2P | مقدار گشتاور موتور در زمان باز شدن ترمز مکانیکی | 30% |
| 2.3.1.3P | مقدار فرکانس موتور در زمان باز شدن ترمز مکانیکی | 0 Hz |
| 2.3.1.4P | تاخیر در باز شدن ترمز مکانیکی در استارت | 0.01 sec |
| 2.3.1.5P | فرکانس خروجی در زمان بسته شدن ترمز مکانیکی | 0.01 Hz |
| 2.3.1.6P | تاخیر زمانی در بسته شدن ترمز مکانیکی در توقف | 0.5 sec |
| 2.3.1.7P | حداکثر فرکانسی که در آن، ترمز مجاز است بسته بماند. | 2 Hz |
| 2.3.1.9P | مدت زمان مگنتازه بودن موتور در زمان استارت | 1 sec |
| 2.3.1.10P | مدت زمان حرکت با فرکانس خیلی کم در استارت | 0.2 sec |
| 2.3.1.11P | فرکانس حرکت با فرکانس خیلی کم در استارت | 1 Hz |
منوی 2M گروه 4
یکی از پارامترهای مهم در این گروه 2.4.2P است که روش ایستادن موتور را نشان میدهد.
اگر این پارامتر بر روی صفر تنظیم شود، در زمان ایستادن، و به محض برداشته شدن فرمان حرکت از روی درایو، ولتاژ و جریان از روی سیمپیچ موتور برداشته میشود تا موتور بر اثر اینرسی بار و به تدریج بایستد. این روش برای بارهای فن (Fan) مناسب است.
اگر این پارامتر را بر روی 1 تنظیم کنید، ایستادن موتور بر اساس Ramp خواهد بود و به محض قطع شدن فرمان حرکت از ورودی درایو، ولتاژ و فرکانس موتور بر اساس منحنی Deceleration که تعریف شده است کاهش خواهد یافت و سرعت موتور صفر خواهد شد. این روش برای بسیاری از بارها، مثل پمپها و نوار نقاله و آسانسور و … مناسب است.
اگر پارامتر 2.4.2P = 2 تنظیم شود، ایستادن بر اساس یک فرکانس خاص، صورت میگیرد. مقدار فرکانس مورد نظر را نیز در فرکانس 2.4.3P وارد کنید که حدوداً 5Hz در نظر گرفته میشود.
برای آسانسور و بالابر و جرثقیل و امثال آنها، روش Ramp توصیه میگردد. P2.4.2 = 1 = Ramping
منوی 2M گروه 5
در این گروه از پارامترها، مد کنترلی موتور و الگوی F/V را مشخص میکنیم. پارامترهای این گروه شامل:
| پارامتر | توضیح پارامتر | تنظیم شود |
| P2.5.1 | نوع کنترل سرعت حلقه باز/بسته، روش کنترلی موتور | 1=Open Loop, 2=Closed Loop |
| 2.5.2P | جبران منحنی f/v | 1=جبران اتوماتیک |
| P2.5.3 | شکل منحنی v/f | 3=Linear with optim |
| P2.5.4 | فرکانس حداکثر منحنی v/f | 50 Hz |
| 2.5.5P | حداکثر ولتاژ در فرکانس ماکزیمم | 100% |
| 2.5.6P | فرکانس نقطه میانی منحنی f/v | 5 Hz |
| 2.5.7P | ولتاژ در نقطه میانی منحنی f/v | 10% |
| 2.5.8P | ولتاژ خروجی در فرکانس صفر | 3% |
| 2.5.9P | فرکانس کریر (KHz 10) | بستگی به درایو دارد. |
| 2.5.10P | کنترل کننده اضافه ولتاژ | 1=used |
| 2.5.11P | کنترل کننده کمبود ولتاژ | 1=used |
پارامترهای 2.5.3P و 2.5.9P جزء پارامترهای مهم این گروه هستند. پارامتر 2.5.3P شکل منحنی F/V را مشخص میکند. برای بارهای با گشتاور ثابت مثل جرثقیل و آسانسور، باید منحنی f/V را خطی انتخاب کرد. اگر 2.2.3P = 0 یا 2.5.3P = 3 انتخاب شود، منحنی f/V خطی خواهد بود.
برای بارهای فن و پمپ، منحنی ولتاژ و فرکانس، U شکل است و مقدار 2.5.3P = 1 تنظیم میشود. برای خرید درایو Vacon NXP متناسب با نیازهای خاص شما، میتوانید با کارشناسان فروش الکترومارکت مشورت کنید.
منوی 2M گروه 6
پارامترهای گروه M2 → G2.6 مربوط به تنظیم ترمینالهای ورودی است. پارامتر 2.6.1P اگر بر روی صفر تنظیم شود، ترمینال ورودی DI 1 به عنوان ورودی راستگرد (بالا) و ترمینال ورودی DI 2 به عنوان ورودی فرمان چپگرد (پایین) خواهد بود. ورودیهای DI 4, DI 5, DI 6 نیز به ترتیب به عنوان ورودیهای انتخاب سرعت (Speed selection 1)، (Speed selection 2) و (Speed selection 3) تعریف شدهاند. ورودی DI 3 را نیز به عنوان ورودی Run در نظر میگیریم.
باید 2.6.7.3P = 0.1 و 2.6.7.4P = 3A قرار داده شود. جدول زیر، مهمترین پارامترهای این گروه را نشان میدهد.
| پارامتر | توضیح پارامتر | تنظیم شود |
| 2.6.1P | تنظیم پایههای DI 1 = راستگرد، DI 2 = چپگرد | |
| 2.6.7.3P | تعریف ورودی به عنوان Enable Run | 0.1 |
| P2.6.7.4 | تعریف ورودی DI 3 = Run Enable | A3 |
| P2.6.7.10 | Speed selection 1 = DI 4 | A4 |
| P2.6.7.11 | Speed selection 2 = DI 5 | A5 |
| P2.6.7.12 | Speed selection 3 = DI 6 | A6 |
منوی 2M گروه 7
از تنظیمات موجود در گروه هفت از منوی 2 برای تنظیم خروجیها، استفاده میشود. پارامترهای 2.7.1P تا 2.7.5P مربوط به خروجیهای آنالوگ است. از پارامترهای 2.7.6P تا 2.7.18P برای تنظیم خروجیهای دیجیتال استفاده کنید.
مهمترین پارامترها در این گروه شامل:
| پارامتر | توضیح پارامتر | تنظیم شود |
| P2.7.6 | خروجی ترانزیستوری DO1 = Ready | 1 |
| P2.7.9 | خروجی رلهای RO1 = Run | 2 |
| P2.7.12 | خروجی رلهای RO2 = Brake | 19 |
خروجی ترانزیستوری 1 به عنوان خروجی READY تعریف شده است. خروجی رلهای 1 به عنوان Run و خروجی رلهای 2 برای کنترل ترمز مکانیکی روی موتور آسانسور، تعریف میشود.
منوی 2M گروه 8
پارامترهایی که به منظور حفاظت درایو در برابر اضافه بار و اضافه ولتاژ و قطع فاز و… تعریف میشود در گروه 8 قرار گرفتهاند.
| پارامتر | توضیح پارامتر | تنظیم شود |
| 2.8.1.3P | عملکرد درایو در برابر خطاهای خارجی | |
| 2.8.2.1P | عملکرد درایو در قطع فاز ورودی | 1 |
| 2.8.2.2P | کاهش ولتاژ | 2 |
| 2.8.2.3P | عملکرد در برابر قطع فاز خروجی | 2 |
| 2.8.2.4P | خطای ارت فالت | 2 |
| 2.8.2.5P | خطای شبکه | |
| 2.8.3.1P | خطای اضافه بار | 2 |
| 2.8.3.4P | مدت زمان مجاز برای اضافه بار | 1 minute |
| 2.8.3.3P | مقدار اضافه بار در فرکانس صفر | 150% |
هر کدام از پارامترهای جدول بالا که بر روی صفر تنظیم شده است به معنی غیر فعال بودن آن است. تنظیم کردن هر کدام از پارامترها با عدد 1 به معنی این است که درایو هشدار خواهد داد ولی فالت نمیدهد و درایو به کار خود ادامه میدهد.
پارامترهایی که با عدد 2 مقداردهی شده است، در برابر وقوع خطا، درایو فالت میدهد و بر اساس پارامتر 2.4.2P سریعاً توقف خواهد کرد. برای عیبیابی و رفع خطاهای رایج در درایوها، میتوانید مقالات آموزشی الکترومارکت را مطالعه کنید.
منوی 2M گروه 9
پارامترهای گروه 9 برای ریست کردن درایو به طور اتوماتیک بعد از وقوع خطا تنظیم میشوند.
| پارامتر | توضیح پارامتر | تنظیم شود |
| 2.9.2P | مدت زمان بین خطا و ریاستارت اتوماتیک | 3 sec |
| P2.9.4 | تعداد خطای Voltage Under که ریاستارت اتوماتیک میشود | 1 |
| P2.9.5 | تعداد خطای Voltage Over که ریاستارت اتوماتیک میشود | 1 |
| P2.9.6 | تعداد خطای اضافه جریان که ریاستارت اتوماتیک میشود | |
| P2.9.7 | تعداد خطای ورودیهای درایو که ریاستارت اتوماتیک میشود | 1 |
در جدول بالا، به طور مثال، اگر خطای اضافه ولتاژ رخ دهد و درایو اعلام خطای Voltage Over کند، به طور اتوماتیک پس از 3 ثانیه به طور اتوماتیک، ریست شود.
تعداد ریاستارت اتوماتیک میتواند حداکثر تا 10 بار باشد ولی اگر مشکل درایو، جدی باشد تعداد زیاد ریستهای متوالی میتواند به درایو آسیب برساند.
پارامترهای مربوط به Keypad 3-M
پارامترهای منوی 3M مربوط به کیپد است. یکی از مهمترین پارامترهای درایو Vacon NXP در این قسمت قرار دارد. پارامتر 3.1P مشخص میکند که درایو از چه طریقی کنترل میشود.
اگر 3.1P = 0 باشد که در کاربردهای کنترلی اتوماتیک و از جمله مثال ما این گونه است، درایو از طریق ورودیهای I/O کنترل میشود یعنی ورودیهای DI 1 تا DI 6 و ورودیهای آنالوگ، وظیفه کنترل سرعت و جهت حرکت موتور را برعهده دارند.
اگر پارامتر 3.1P = 1 بر روی یک تنظیم شده باشد که به طور پیش فرض نیز اینگونه است، فرمان حرکت استارت و توقف درایو، از طریق صفحه کلید Keypad روی درایو صادر میشود. و سرعت با کلیدهای سمت بالا و پایین، تغییر میکند. و موتور فقط در یک جهت خواهد چرخید.
اگر 3.1P = 2 باشد، درایو از طریق شبکه فیلدباس (Fieldbus) کنترل خواهد شد.
پارامتر بعدی 3.4P است. این پارامتر را در روی 3.4P = 1 تنظیم کنید، در این حالت، کلید Stop روی کیپد، همواره قابل استفاده است حتی وقتی 3.1P = 0 باشد.
پارامترهای سیستمی 6M در درایو Vacon NXP
تنظیمات سیستم درایو و پارامترهایی که وظیفه انتقال پارامترها و Default کردن پارامترها به تنظیمات کارخانه و … را بر عهده دارند، در منوی 6 قرار داده شده است. همچنین برخی از سختافزارها مثل فن درایو را هم میتوان در این بخش کنترل نمود.
مهمترین پارامتر در منوی 6M پارامتر 6.3.1S است. اگر این پارامتر را بر روی Load Factory Defaults قرار دهید، تمامی پارامترهای درایو، به تنظیمات کارخانه باز خواهد گشت. همچنین پارامتر 6.2S که نوع Application را مشخص میکند و نوع کاربری درایو، تنظیم میشود.
مهمترین پارامترها در این منو، شامل جدول زیر میباشد.
| پارامتر | توضیح پارامتر | تنظیم شود |
| 6.2S | نوع کاربری درایو | Lift Application |
| 6.3.1S | بازگشت به تنظیمات کارخانه | Load Factory Defaults |
| 6.7.1P | مقاومت ترمز داخلی | connected |
| P6.7.2 | روش بهکار افتادن فن خنک کننده درایو فن درایو | Temperature |
لیست کامل کدهای خطا (Fault Codes) درایو Vacon NXP
بر اساس اطلاعات استخراجشده از دفترچه راهنمای Vacon NXS/NXP (از منابع معتبر مانند user manualها)، لیست کامل کدهای خطا به صورت جدول زیر آورده شده است. این لیست از بخش Fault Codes استخراج شده و شامل کد خطا، نام خطا، علت ممکن، و اقدامات اصلاحی است. توجه داشته باشید که لیست بر اساس نسخههای استاندارد manual است و ممکن است بسته به نسخه نرمافزاری یا مدل، تفاوتهایی داشته باشد.
| کد خطا | نام خطا | علت احتمالی | اقدامات اصلاحی |
|---|---|---|---|
| 1 | اضافه جریان | درایو AC جریان بیش از حد بالا (>4*I_H) را در کابل موتور تشخیص داده است: افزایش ناگهانی بار سنگین، اتصال کوتاه در کابلهای موتور، موتور نامناسب | بررسی بار. بررسی موتور. بررسی کابلها. اجرای شناسایی موتور. |
| 2 | اضافه ولتاژ | ولتاژ لینک DC از حد مجاز فراتر رفته است: زمان کاهش سرعت خیلی کوتاه، spikes اضافه ولتاژ بالا در منبع تغذیه | زمان کاهش سرعت را طولانیتر کنید. از چوپر ترمز یا مقاومت ترمز (به عنوان گزینه) استفاده کنید. کنترلکننده اضافه ولتاژ را فعال کنید. بررسی ولتاژ ورودی. |
| 3 | خطای زمین | اندازهگیری جریان تشخیص داده که مجموع جریان فازهای موتور صفر نیست: شکست عایقی در کابلها یا موتور | بررسی کابلهای موتور و موتور. |
| 5 | سوئیچ شارژ | سوئیچ شارژ باز است، زمانی که فرمان START داده شده: عملکرد معیوب، شکست قطعه | خطا را ریست کنید و دوباره شروع کنید. اگر خطا تکرار شد، با توزیعکننده نزدیک تماس بگیرید. |
| 6 | توقف اضطراری | سیگنال توقف از برد گزینه داده شده است. | بررسی مدار توقف اضطراری. |
| 7 | اشباع تریپ | علل مختلف: قطعه معیوب، اتصال کوتاه یا اضافه بار مقاومت ترمز | نمیتوان از کیپد ریست کرد. برق را خاموش کنید. برق را دوباره وصل نکنید! با کارخانه تماس بگیرید. اگر این خطا همزمان با خطای 1 رخ دهد، کابلهای موتور و موتور را بررسی کنید. |
| 8 | خطای سیستم | شکست قطعه، عملکرد معیوب. زیرکدها: S1 تا S11 (مختلف، مثلاً سوئیچ شارژ، عدم تغذیه به کارت درایور، و غیره) | خطا را ریست کنید و دوباره شروع کنید. اگر خطا تکرار شد، با توزیعکننده نزدیک تماس بگیرید. |
| 9 | کمبود ولتاژ | ولتاژ لینک DC کمتر از حد مجاز است: ولتاژ منبع خیلی کم، خطای داخلی درایو AC، فیوز ورودی معیوب، سوئیچ شارژ خارجی بسته نیست | در صورت قطع موقت ولتاژ منبع، خطا را ریست کنید و درایو AC را دوباره شروع کنید. ولتاژ منبع را بررسی کنید. اگر کافی باشد، یک شکست داخلی رخ داده است. با توزیعکننده نزدیک تماس بگیرید. |
| 10 | نظارت خط ورودی | فاز خط ورودی گم شده است. | بررسی ولتاژ منبع، فیوزها و کابل. |
| 11 | نظارت فاز خروجی | اندازهگیری جریان تشخیص داده که جریان در یک فاز موتور وجود ندارد. | بررسی کابل موتور و موتور. |
| 12 | نظارت چوپر ترمز | مقاومت ترمز نصب نشده، مقاومت ترمز شکسته، شکست چوپر ترمز | بررسی مقاومت ترمز و کابلکشی. اگر اینها خوب باشند، چوپر معیوب است. با توزیعکننده نزدیک تماس بگیرید. |
| 13 | دمای پایین درایو AC | دمای هیتسینک کمتر از -10°C است. | بررسی دمای محیط. |
| 14 | دمای بالای درایو AC | دمای هیتسینک بیش از 90°C (یا 77°C برای برخی مدلها) است. هشدار اضافه دما زمانی صادر میشود که دمای هیتسینک بیش از 85°C (72°C) باشد. | بررسی مقدار و جریان صحیح هوای خنککننده. بررسی هیتسینک برای گرد و غبار. بررسی دمای محیط. مطمئن شوید که فرکانس سوئیچینگ خیلی بالا نباشد نسبت به دمای محیط و بار موتور. |
| 15 | موتور متوقف | حفاظت متوقف موتور تریپ کرده است. | بررسی موتور و بار. |
| 16 | اضافه دمای موتور | اضافه دمای موتور توسط مدل دمای موتور درایو AC تشخیص داده شده: موتور اضافه بار است. | بار موتور را کاهش دهید. اگر اضافه بار موتور وجود ندارد، پارامترهای مدل دما را بررسی کنید. |
| 17 | بار کم موتور | حفاظت بار کم موتور تریپ کرده است. | بررسی بار. |
| 18 | عدم تعادل | عدم تعادل بین ماژولهای قدرت در واحدهای موازی. زیرکد: S1 = عدم تعادل جریان، S2 = عدم تعادل ولتاژ DC | اگر خطا تکرار شد، با توزیعکننده نزدیک تماس بگیرید. |
| 22 | خطای چکسام EEPROM | خطای ذخیره پارامتر: عملکرد معیوب، شکست قطعه | اگر خطا تکرار شد، با توزیعکننده نزدیک تماس بگیرید. |
| 24 | خطای شمارنده | مقادیر نمایشدادهشده روی شمارندهها نادرست هستند | سعی کنید شمارندهها را ریست کنید. اگر کمک نکرد، با توزیعکننده Vacon خود تماس بگیرید. |
| 25 | خطای واچداگ میکروپروسسور | عملکرد معیوب. شکست قطعه | خطا را ریست کنید و دوباره شروع کنید. اگر خطا تکرار شد، با توزیعکننده نزدیک تماس بگیرید. |
| 26 | جلوگیری از شروع | شروع درایو جلوگیری شده است. درخواست اجرا در جهت اشتباه؟ | جلوگیری از شروع را لغو کنید اگر این کار ایمن باشد. درخواست اجرا در جهت اشتباه را حذف کنید. |
| 29 | خطای ترمیستور | ورودی ترمیستور برد گزینه افزایش دمای موتور را تشخیص داده است | بررسی خنککننده موتور و بار. بررسی اتصال ترمیستور (اگر ورودی ترمیستور برد گزینه استفاده نشود، باید کوتاه شود). |
| 30 | غیرفعال ایمن | ورودی روی برد OPT-AF باز شده است | بررسی سوئیچ ایمنی، کابل سوئیچ ایمنی و کانکتور. |
| 31 | دمای IGBT (سختافزار) | اضافه دمای پل اینورتر IGBT تشخیص داده شده است | بررسی بار. بررسی اندازه موتور. اجرای شناسایی. |
| 32 | فن خنککننده | فن خنککننده درایو AC شروع نمیشود، زمانی که فرمان ON داده شده | با توزیعکننده نزدیک تماس بگیرید. |
| 34 | ارتباط CAN باس | پیام ارسالشده تأیید نشده است. | مطمئن شوید که دستگاه دیگری روی باس با همان پیکربندی وجود دارد. |
| 35 | اپلیکیشن | مشکل در نرمافزار اپلیکیشن | با توزیعکننده خود تماس بگیرید. اگر تولیدکننده اپلیکیشن هستید، نرمافزار خود را بررسی کنید. |
| 37 | دستگاه تغییر یافته (همان نوع) | برد گزینه تغییر یافته است. برد گزینه همان نوع قبلی در همان اسلات دارد. | ریست. دستگاه آماده استفاده است. تنظیمات پارامتر قدیمی استفاده خواهد شد. |
| 38 | دستگاه اضافه شده (همان نوع) | برد گزینه اضافه شده است. برد گزینه همان نوع قبلی در همان اسلات. | ریست. دستگاه آماده استفاده است. تنظیمات برد قدیمی استفاده خواهد شد. |
| 39 | دستگاه حذف شده | برد گزینه از اسلات حذف شده است. | ریست. دستگاه دیگر در دسترس نیست. |
| 40 | دستگاه ناشناخته | برد گزینه یا درایو ناشناخته. | با توزیعکننده نزدیک تماس بگیرید. |
| 41 | دمای IGBT | اضافه دمای پل اینورتر IGBT تشخیص داده شده است | بررسی بار. بررسی اندازه موتور. اجرای شناسایی. |
| 42 | اضافه دمای مقاومت ترمز | اضافه دمای مقاومت ترمز تشخیص داده شده است | بررسی مقاومت ترمز. اگر اتصال درست باشد، مقاومت ترمز معیوب است. |
| 43 | خطای انکودر | مشکل در سیگنالهای انکودر تشخیص داده شده است. | بررسی اتصالات کانال انکودر. بررسی برد انکودر. |
| 44 | دستگاه تغییر یافته (نوع متفاوت) | برد گزینه تغییر یافته است. برد گزینه نوع متفاوت از قبلی. | ریست. هیچ دستگاهی با تنظیمات پارامتر قدیمی آماده استفاده نیست. پارامترهای برد گزینه را دوباره تنظیم کنید. |
| 45 | دستگاه اضافه شده (نوع متفاوت) | برد گزینه اضافه شده است. برد گزینه نوع متفاوت از قبلی. | ریست. هیچ دستگاهی با تنظیمات برد قدیمی آماده استفاده نیست. پارامترهای برد گزینه را دوباره تنظیم کنید. |
| 50 | ورودی آنالوگ I_in < 4mA | جریان در ورودی آنالوگ < 4mA است. کابل کنترل شکسته یا شل است. منبع سیگنال شکست خورده است. | بررسی حلقه جریان، منبع سیگنال و کابلکشی. |
| 51 | خطای خارجی | خطای ورودی دیجیتال. ورودی دیجیتال به عنوان ورودی خطای خارجی برنامهریزی شده و این ورودی فعال است. | برنامهریزی را بررسی کنید و دستگاه نشاندادهشده توسط اطلاعات خطای خارجی را بررسی کنید. همچنین کابلکشی این دستگاه را بررسی کنید. |
| 52 | خطای ارتباط کیپد | اتصال بین کیپد کنترل و درایو AC قطع شده است. | بررسی اتصال کیپد و کابل کیپد احتمالی. |
| 53 | خطای فیلدباس | اتصال داده بین مستر فیلدباس و برد فیلدباس قطع شده است | بررسی نصب. اگر نصب درست باشد، با نزدیکترین توزیعکننده Vacon تماس بگیرید. |
| 54 | خطای اسلات | برد گزینه یا اسلات معیوب | بررسی برد و اسلات. با نزدیکترین توزیعکننده Vacon تماس بگیرید. |
| 56 | خطای دمای برد PT100 | دمای اندازهگیریشده توسط PT100 خیلی بالا است | بررسی بار. بررسی کابلکشی و برد PT100. |
| 57 | شناسایی | اجرای شناسایی شکست خورده است. | فرمان اجرا قبل از تکمیل اجرای شناسایی حذف شد. موتور به درایو AC متصل نیست. بار روی شفت موتور وجود دارد. |
| 58 | ترمز مکانیکی | وضعیت واقعی ترمز مکانیکی متفاوت از سیگنال کنترل است | بررسی وضعیت ترمز مکانیکی و اتصالات |
| 59 | دستگاه دنبالکننده | خطای ارتباط روی باس سیستم | بررسی بردهای گزینه، اتصالات فیبر و ترمیناتورهای باس. بررسی درایو مستر فعال. |
| 60 | خنککننده | گردش خنککننده روی درایو خنکشده با مایع شکست خورده است. | بررسی دلیل شکست روی سیستم خارجی. |
| 61 | خطای سرعت | سرعت موتور برابر با مرجع نیست | بررسی اتصال انکودر. حالت کنترل موتور = 3 یا 4 و تنظیم انجام نشده است. |
| 62 | غیرفعال اجرا | سیگنال فعال اجرا کم است | بررسی دلیل فعال اجرا کم. |
| 63 | توقف اضطراری | سیگنال توقف از برد گزینه داده شده است. | بررسی مدار توقف اضطراری. |
| 64 | سوئیچ ورودی | سوئیچ ورودی باز است | بررسی سوئیچ قدرت اصلی درایو. |
| 65 | خطای ارتباط PC | اتصال بین PC و درایو AC قطع شده است. | بررسی اتصال PC و کابل. |
| 66 | خطای ترمیستور | دمای موتور از سطح تنظیمشده فراتر رفته است. | بررسی اتصال ترمیستور و دمای موتور. |
| 67 | خطای نوشتن فیلدباس | فرمان نوشتن فیلدباس شکست خورده است. | بررسی پیکربندی فیلدباس و کابلکشی. |
| 68 | نگهداری | شمارنده نگهداری به حد هشدار رسیده است | نگهداری مورد نیاز را انجام دهید و شمارنده را ریست کنید. |
| 69 | زمانبندی پر کردن نرم | عملکرد پر کردن نرم شکست خورده است. | بررسی شیرها و غیره که جریان را تنظیم میکنند. |
جدول انتخاب مقاومت ترمز برای درایو Vacon NXP
بر اساس اطلاعات استخراجشده از دفترچه راهنمای Vacon NX Brake Resistor User Manual، جدولهای انتخاب مقاومت ترمز برای سری Vacon NX (شامل NXP) برای محدودههای ولتاژ مختلف (208-240V، 380-500V، 525-690V) در زیر آورده شده است. هر جدول شامل ستونهای واحد، نوع، مقاومت، انرژی، توان متوسط، و توصیف چرخه وظیفه است. نکات و توضیحات مرتبط با جدولها در انتها ذکر شده است.
جدول انتخاب مقاومت ترمز برای محدوده 208-240V
| واحد | نوع | مقاومت (Ω) | انرژی (kJ) | توان متوسط (kW) | توصیف چرخه وظیفه |
|---|---|---|---|---|---|
| BRR 0025 LD2 | سبک (Light Duty) | 30 | 12.55 | 0.10 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0031 LD2 | سبک (Light Duty) | 20 | 18.8 | 0.16 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0061 LD2 | سبک (Light Duty) | 10 | 38 | 0.31 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0114 LD2 | سبک (Light Duty) | 3.3 | 114 | 0.95 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0205 LD2 | سبک (Light Duty) | 1.4 | 269 | 2.24 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0034 LD6 | سنگین (Heavy Duty) | 30 | 32.6 | 0.27 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0031 HD2 | سنگین (Heavy Duty) | 20 | 49 | 0.41 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0061 HD2 | سنگین (Heavy Duty) | 10 | 98 | 0.81 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0114 HD2 | سنگین (Heavy Duty) | 3.3 | 297 | 2.47 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0205 HD2 | سنگین (Heavy Duty) | 1.4 | 699 | 5.81 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
نکات برای محدوده 208-240V:
- مقاومت سبک: IP50 با اتصال مستقیم سیم. BRR0025 LD2 حفاظت حرارتی به عنوان گزینه دارد.
- مقاومت سنگین: IP20/21، جعبه اتصال، حفاظت حرارتی به عنوان استاندارد.
- سوئیچ حرارتی (OT1) برای BRR 0034 LD6 اختیاری است.
جدول انتخاب مقاومت ترمز برای محدوده 380-500V
| واحد | نوع | مقاومت (Ω) | انرژی (kJ) | توان متوسط (kW) | توصیف چرخه وظیفه |
|---|---|---|---|---|---|
| BRR 0022 LD5 | سبک (Light Duty) | 63 | 28 | 0.24 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0031 LD5 | سبک (Light Duty) | 42 | 42 | 0.35 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0045 LD5 | سبک (Light Duty) | 21 | 84 | 0.71 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0061 LD5 | سبک (Light Duty) | 14 | 127 | 1.06 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0105 LD5 | سبک (Light Duty) | 6.5 | 273 | 2.28 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0300 LD5 | سبک (Light Duty) | 3.3 | 547 | 4.56 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0520 LD5 | سبک (Light Duty) | 1.4 | 1270 | 10.58 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0022 HD5 | سنگین (Heavy Duty) | 63 | 73 | 0.61 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0031 HD5 | سنگین (Heavy Duty) | 42 | 109 | 0.91 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0045 HD5 | سنگین (Heavy Duty) | 21 | 218 | 1.82 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0061 HD5 | سنگین (Heavy Duty) | 14 | 330 | 2.75 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0105 HD5 | سنگین (Heavy Duty) | 6.5 | 710 | 5.92 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0300 HD5 | سنگین (Heavy Duty) | 3.3 | 1420 | 11.83 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0520 HD5 | سنگین (Heavy Duty) | 1.4 | 3300 | 27.50 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
نکات برای محدوده 380-500V:
- مقاومتهای سبک و سنگین مشابه محدوده قبلی، با حفاظتهای مربوطه.
- برای درایوهای NXL، NXS و NXP طبق جدول انتخاب کنید.
جدول انتخاب مقاومت ترمز برای محدوده 525-690V
| واحد | نوع | مقاومت (Ω) | انرژی (kJ) | توان متوسط (kW) | توصیف چرخه وظیفه |
|---|---|---|---|---|---|
| BRR 0022 LD6 | سبک (Light Duty) | 108 | 49 | 0.41 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0031 LD6 | سبک (Light Duty) | 72 | 73 | 0.61 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0045 LD6 | سبک (Light Duty) | 36 | 146 | 1.22 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0061 LD6 | سبک (Light Duty) | 24 | 219 | 1.83 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0105 LD6 | سبک (Light Duty) | 11 | 473 | 3.94 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0300 LD6 | سبک (Light Duty) | 5.6 | 946 | 7.88 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0520 LD6 | سبک (Light Duty) | 2.4 | 2190 | 18.25 | 5 ثانیه ترمز کامل گشتاور، 1 پالس/2 دقیقه |
| BRR 0022 HD6 | سنگین (Heavy Duty) | 108 | 127 | 1.06 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0031 HD6 | سنگین (Heavy Duty) | 72 | 190 | 1.58 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0045 HD6 | سنگین (Heavy Duty) | 36 | 379 | 3.16 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0061 HD6 | سنگین (Heavy Duty) | 24 | 569 | 4.74 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0105 HD6 | سنگین (Heavy Duty) | 11 | 1230 | 10.25 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0300 HD6 | سنگین (Heavy Duty) | 5.6 | 2460 | 20.50 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
| BRR 0520 HD6 | سنگین (Heavy Duty) | 2.4 | 5690 | 47.42 | 3 ثانیه گشتاور کامل کاهش به صفر در 7 ثانیه، 1 پالس/2 دقیقه |
نکات برای محدوده 525-690V:
- مشابه نکات قبلی، با تمرکز بر چرخههای وظیفه برای کاربردهای سبک و سنگین.
- برای استفاده جزئی (partial use) از مقاومتها انتخاب کنید. برای استفادههای سنگینتر، ممکن است نیاز به محاسبات اضافی باشد.
الکترومارکت به عنوان یک منبع معتبر و تخصصی در حوزه تأمین تجهیزات اتوماسیون صنعتی، آماده ارائه خدمات جامع به شما عزیزان است. ما به شما کمک میکنیم تا بهترین درایو Vacon NXP را برای نیازهای خاص پروژه خود انتخاب کنید. خدمات ما شامل:
- مشاوره تخصصی رایگان: تیم مجرب مهندسان الکترومارکت آماده ارائه مشاورههای فنی دقیق برای انتخاب دقیقترین و مناسبترین درایو بر اساس مشخصات آسانسور شما هستند.
- تأمین و فروش: الکترومارکت تضمین میکند که شما درایو Vacon NXP اصلی و با کیفیت را با بهترین قیمت و در کوتاهترین زمان ممکن دریافت خواهید کرد.
- پشتیبانی فنی و خدمات پس از فروش: حتی پس از خرید، میتوانید روی پشتیبانی فنی و خدمات پس از فروش ما برای نصب، راهاندازی، عیبیابی و رفع مشکلات احتمالی حساب کنید.
- منابع آموزشی و مقالات تخصصی: برای گسترش دانش خود در زمینه درایوها، PLC ها، HMI ها و دیگر تجهیزات صنعتی، میتوانید به طور منظم به وبلاگ الکترومارکت سر بزنید و از مقالات آموزشی ما بهرهمند شوید.
 تماس با ما – الکترومارکت
تماس با ما – الکترومارکت الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست.
الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست. دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷
دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷  تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴
تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴ وبسایت:
وبسایت:  در دسترس برای مشاوره رایگان
در دسترس برای مشاوره رایگان