مشخصات و اصول کار موتور رلوکتانسی سوئیج شونده (SR)-بخش 1
مشخصات موتور SR
ازآنجاکه روتور و استاتور هر دو دارای قطبهای برجسته هستند، موتور رلوکتانسی سوئیچ شونده (SR) بسیار متفاوت از سایر ماشینهای چند فاز است.
این موتور را میتوان فقط به همراه مبدل قدرت مخصوص و کنترل استفاده کرد، درنتیجه تنها مشخصات کلی آنها مناسب است.
موتور SR از طریق کشش آهنربایی گشتاور ایجاد میکند که بین آهنرباهای مغناطیسی استاتور و مجموعه قطبهای برجسته اتفاق میافتد که بر روی یک روتور ساده شکل میگیرد که از جنس مواد فرومغناطیسی ساخته میشود.
Reluctance Motor
موتور رلوکتانسی چیست؟
موتورهای رلوکتانسی نوعی از موتورها هستند که ترکیبات آهنربایی یا همان مغناطیس دائم در ساختار روتور یا استاتور آنها به کار نرفته است و تنها با تمایل به کاهش رلوکتانس باعث ایجاد گشتاور میشوند.
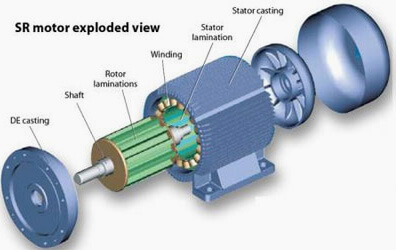
در ساختار و فیزیک یک موتور رلوکتانسی معمولاً روتور فاقد سیمپیچ و مواد مغناطیس دائم است.
بنابراین این موتورها دارای ساختاری بسیار ساده، مقاوم و ارزان هستند.
ویژگیهای فوق موجب گشته تا این مدل از موتورها در سالهای اخیر بیشتر موردتوجه قرار گیرند.
موتور رلوکتانسی را به جهت تنوع در ساختار میتوان به سه دسته تقسیم کرد:
- موتور رلوکتانسی سنکرون
- موتور سوئیچ رلوکتانس
- موتور پله ای رلوکتانس متغیر
موتورهای رلوکتانسی سنکرون دارای استاتوری مشابه موتورهای القایی بوده و دارای روتوری با ساختاری خاص میباشند
که رلوکتانس آن ناهمگون و غیریکنواخت است و این ناهمگونی در رلوکتانس موجب تولید گشتاور میگردد.
شکل زیر نحوه ی تولید گشتاور را در یک موتور رلوکتانسی به صورت بسیار ابتدایی و ساده نشان می دهد.
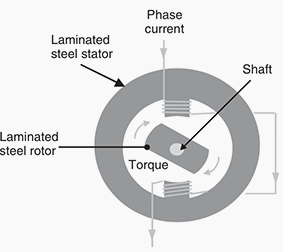
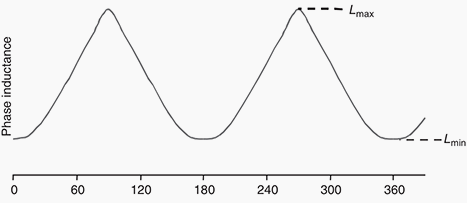
اگر جریان وارد سیم پیچ شود روتور تا نقطه ای که با کویل ها همسو شود خواهد چرخید، که در این نقطه اندوکتانس مدار مغناطیسی دارای مقدار حداقل است. تغییرات مشخصه ی اندوکتانس یک موتور SR در شکل ۲ ارائه شده است.
اگر ماشین بهطور آهسته و بهصورت مغناطیسی بارگذاری شده و سطح متوسطی از گشتاور تولید شود، فولادی که روتور و استاتور از آن ساخته شده است بهطور مغناطیسی و تقریباً بهصورت خطی رفتار خواهد کرد.
یعنی، برای تعداد مشخصی از دورهای سیمپیچ، شار مغناطیسی فاز تقریباً متناسب با جریان فاز تغییر میکند. با فرض خطی بودن، نشان داده خواهد شد که گشتاور بهصورت تابعی از زاویهی q تولید میشود:
T = [i2 (dL / dθ)] / ۲
معادلهی فوق نشان میدهد که گشتاور مستقل از مسیر جریان است،
اما به جریانی که در زمان افزایش یا کاهش اندوکتانس L با موقعیت زاویه ای اعمال می شود نیز بستگی دارد.
جریانهای فازی همیشه بهصورت سنکرون با موقعیت مکانیکی روتور تغییر میکنند. در سرعتهای کم، فازها در تمام منطقه ی اندوکتانس افزایشی برقدار می شوند و محدودسازی جریان اکتیو توسط کنترلکننده انجام میشود. گشتاور نیز با تنظیم دامنهی جریان فاز کنترل می شود.
با افزایش سرعت، زمانهای صعود و نزولِ (به ویژه زمان نزول) جریان فاز، زاویه ی قابل توجهی از روتور را اشغال میکند و معمول است که زوایای روشن و خاموش را از قبل بر حسب موقعیت روتور مشخص میکنند.
اکنون گشتاور توسط هر دو سطح محدودیت جریان و سوئیچینگ زاویه ها کنترل میشود،
اگرچه جریان بطور معمول به عنوان متغیر کنترلی اولیه استفاده میشود.
با اینحال، در سرعتهای بالا، زمانهای نزول و صعود هنوز زوایای روتوری بزرگتری را اشغال میکنند.
جریان بصورت طبیعی خود محدود کن است و کنترل گشتاور تنها با استفاده از سوئیچینگ زاویه ها معمول است.
شکل موج جریان تا حد زیاد تحت تاثیر نسبت بالای تغییر اندوکتانس بر حسب زمان است.
با انتخاب زوایای سوئیچینگ مناسب و سطوح جریان، همراه با طراحی الکترومغناطیسی مناسب، میتوان مشخصه ی سرعت گشتاور درایو رلوکتانسی سوئیچ شونده را برای کاربرد متناسب تغییر داد. علاوه بر این، فقط با تغییر انتخاب پارامتر کنترلی با گشتاور و سرعت، طراحی ماشین معین را میتوان به منظور ارائه ی انتخاب مشخصات مختلف ایجاد کرد.
ماشین تکفاز ساده در شکل ۱ قابلیت تولید گشتاور تنها بر روی نصف چرخه ی الکتریکی را دارد.
کاربردهای مبرم از قطبهای بیشتر روی روتور و استاتور (با قطبهای استاتور سیم پیچی شده و متصل به فازهای چندگانه یکسان) استفاده میکنند.
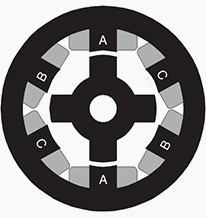
شکل ۳ سطح مقطع ماشین ۴-۶ سه فازی را نشان میدهد.
در آن قطبهای مخالف بصورت قطری برای تشکیل مدارهای سه فاز با A و B و C متصل شده اند.
تحریک فازها بطور مساوی در طول دوره تناوب برقی ماشین انجام میشود.
به این معنی که گشتاور با پلاریته ی مطلوب را میتوان بصورت پیوسته تولید کرد.
تعداد فازها را بصورت تئوری میتوان بدون محدودیت افزایش داد، اما یک تا چهار فاز برای کاربردهای تجاری و صنعتی بسیار رایج هستند.
ترکیبات مختلف زیادی برای شماره ی قطبها امکانپذیر است. در بعضی زمانها استفاده از بیش از یک جفت قطب استاتور در هر فاز مفید است.
بطوریکه، به عنوان مثال، ساختار ۸-۱۲ قطبی معمولا برای کاربردهای سه فاز استفاده میشود.
لذا، هر مدار فاز شامل چهار کویل استاتور است که به همراه هم متصل شده و برقدار میشوند.
افزایش تعداد فاز باعث صافتر شدن گشتاور میشود.
راه اندازی خودی در هر جهت مستلزم حداقل سه فاز است.
کاربرد و مزایا
این درایوهای موتور رلوکتانسی سوئیچ شونده در کاربردهای سطح بالایی استفاده میشوند و برخی کاربردهای صنعتی میتوانند از مشخصات آنها بخوبی استفاده کنند، بویژه در مواردی که گشتاور راه اندازی زیادی مورد نیاز است و به صافی چرخش اهمیت کمی داده میشود.
پیشرفتهای قابل توجهی برای بهبود مشخصات نویز این درایو انجام شده است،
اما این موضوع ممکن است عامل محدود کننده باشد که محدوده ی سرعت عملیاتی گسترده ای مورد نیاز است.
برای مطالعه بیشتر توصیه می شود:مشخصات و اصول کار موتور رلوکتانسی سوئیج شونده (SRM)-بخش ۲
با سلام خدمت مهندس رجبی عزیز
در خصوص موتورهای سوئیچ رلوکتانسی و درایو آن اگر امکان دارد منبع ای را معرفی کنید .
سلام
https://en.wikipedia.org/wiki/Switched_reluctance_motor