
بررسی توان ترمز و اصول کلی ابعاد انرژی ترمز های الکتریکی بر پایه اینورتر های فرکانس متغیر
درود بر شما
برای ارزیابی انرژی ترمز درایوهای فرکانس متغیر ابتدا می بایست به مقدمه هایی از بحث مکانیک پرداخته شود.
اصول کلی ابعاد انرژی ترمز
یکی از موارد مورد نیاز، اغلب اعمال ترمز بر یک سیستم مکانیکی در یک زمان مشخص است، و یا همچنین مراحلی در روند پروسه وجود دارند که در آن ها موتور در حالت ژنراتوری (ریجنریتیو) با سرعت ثابت یا کمی متغیر کار می کند.
Check Brake Energy Regenerative Variable Frequency Drives
پیشنهاد میشود مطالعه شود:انرژی ترمز و احیای آن (ریجنریتیو) با اینورتر AC بخش دوم
نکته:
“یک نکته که باید به آن توجه داشته باشید این است که تجهیزات و دستگاه های مورد استفاده در ترمز های الکتریکی با توجه به توان ترمز سایزبندی شده اند.
توان و انرژی ترمز مکانیکی به دو المان سرعت و گشتاور بستگی دارد به فرمول فوق توجه فرمایید: فرمول (2.1)
Pmech=T × ω =T × n60
هرچه سرعت بالاتر باشد توان هم بالاتر است. این توان است که در نهایت در یک جریان و ولتاژ خاص معینی را اعمال می کند. با همان توان، در ولتاژ بالاتر جریان پایین تری مورد نیاز است،فرمول (2.2)
Pelectrical= UDC × IDC = 3 × UAC × IAC × cosɸ
در تعریف هزینه های درایو های فرکانس متغیر ولتاژ پایین، جریان یک جزء اصلی به حساب می آید.
در فرمول (2.2) ما دوره cosϕ را می توانیم دریابیم. این دوره، این مسئله را که چه میزان جریان موتور برای مغناطیس آن مورد استفاده قرار می گیرد را تعریف می کند. جریان مغناطیسی هیچ گونه گشتاوری تولید نمی کند و در نتیجه نادیده گرفته می شود.
جریان مغناطیسی موتور
از سوی دیگر، جریان مغناطیسی موتور از منبع تغذیه AC که منبع تغذیه مبدل است، گرفته نمی شود،
به عنوان مثال؛
جریانی که جهت آن بسوی اینورتر است، از جریان تغذیه ای که به سمت موتور است پایین تر می باشد. این واقعیت بدین معناست که از جهت تغذیه، cosϕ به طور معمول نزدیک به 1.0 است. توجه داشته باشید که در فرمول (2.2)، تصور برآن بوده است که هنگامی که توان DC به توان AC تبدیل می گردد، هیچ اتلافی رخ نمی دهد. می توان گفت برخی تلفات در این تبدیل وجود دارند (حدود 1 درصد)، اما در این زمینه می توان این اتلافات را نادیده گرفت.
مبانی توصیف بار موتور ها
به طور معمول بارها در انواع گشتاور ثابت (VTC) یا گشتاور متغیر (V/F) طبقه بندی می شوند.
گشتاور بار متغیر (درجه دوم) بدان معناست که گشتاور بار متناسب با مربع سرعت است.
همچنین بدین معنا است که توان با سرعت، به نسبت 3n متناسب است. “در برنامه های گشتاور ثابت، توان به طور مستقیم با سرعت متناسب است.
یشنهاد میشود مطالعه شود: الگوریتم وکتور کنترل + نحوه عملکرد اینورتر
گشتاور ثابت و گشتاور متغیر (درجه دوم)
گشتاور ثابت (وکتور کنترل):
C = ثابت
(2.3): Tload = C
(2.4): Pload = T × ω = C × ω
گشتاور متغیر (درجه دوم):
(2.5): Tload = C × ω2
(2.6): Pload = T × ω = C × ω2× ω = C × ω3
ارزیابی توان و گشتاور در زمان ترمز الکتریکی
در مورد عملکرد حالت پایدار (شتاب زاویه ای α صفر است) گشتاور موتور می بایست گشتاور اصطکاکی ایجاد کند که متناسبا با سرعت زاویه ای و نیز گشتاور بار در آن سرعت زاویه ای خاص مطابقت دارد. توان و گشتاور ترمز مورد نیاز نسبت به زمان، در این دو نوع بار، تا حد زیادی متفاوت است.
(2.7): Tmotor = J × α + β × W + Tload ω
اجازه دهید تا در ابتدا موردی را در نظر بگیریم که در آن بار از نوع گشتاور ثابت است و سیستم درایو قادر به تولید گشتاور ترمز نیست، به عنوان مثال؛ درایو خود از نوع تک ربع است. به منظور محاسبه مدت زمان یکبار اعمال ترمز می توان رابطه زیر را به کار برد.
لطفا توجه داشته باشید که فرمول (2.7) تأکید می کند که گشتاور مورد نیاز برای اینرسی شتاب (یا شتاب منفی)، اصطکاک و گشتاور بار در جهت مخالف گشتاور موتور است.
(2.8): O= -J × α + β × W + Tload(ω)
عملا تعریف اثر اصطکاک به طور دقیق دشوار است. با فرض این که اصطکاک صفر باشد، زمان در جهت ایمنی محاسبه می شود.
(2.9): Tload (ω) = J × α = J × [(ωstart- ωend)/t] = J × [(nstart-nend) × 2π/ t × 60]
با حل t فرمول زیر را نتیجه می گیریم:
(2.10): T= J × [(nstart-nend) × 2π/ 60 × Tload(ω)]
با فرض اینکه اینرسی بار kgm 260 و گشتاور بار Nm 80 بیش تر از کل محدوده سرعت باشد، اگر بار در 1000rmp در حال اجرا باشد و گشتاور موتور را صفر قرار دهیم، بار به سرعت صفر در زمان میل خواهد کرد.
(2.11): T = J × [(nstart-nend) × 2π/60 × Tload(ω)] = 60 × [(1000-0) ×2π/60×800] = 7.85 s
این فرمول برای آن دسته از برنامه هایی که در آن ها، گشتاور بار در حین شروع عملیات ترمز، ثابت باقی می ماند به کار می رود.
در مواردی که در آن ها گشتاور بار از بین می رود (به عنوان مثال؛ زمانی که تسمه نقاله شکسته است) انرژی جنبشی مکانیکی بدون تغییر باقی می ماند اما گشتاور بار که سبب کاهش سرعت مکانیکی بود اکنون تأثیری بر روند ندارد. در آن مورد اگر موتور، ترمز اعمال نکند سرعت تنها در نتیجه اصطکاک مکانیکی کاهش می یابد.
پیشنهاد میشود مطالعه شود: صرفه جویی انرژی با شناخت 4 مورد مهم در الکترومارکت
مثال قابل توجه انرژی ترمز:
حال موردی را تصور کنید که همان اینرسی و گشتاور بار در 1000rmp باشد، اما در جایی که گشتاور بار با رفتاری درجه دوم متغیر است.
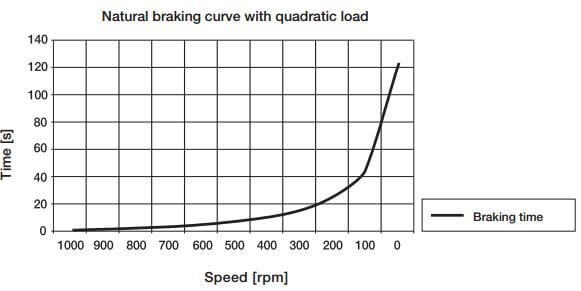
اگر گشتاور موتور صفر شود، گشتاور بار در یک نسبت درجه دوم از سرعت افزایش می یابد. اگر کوتاهی و بلندی مدت زمان ترمز با دو عامل توان بار و دیگری گشتاورترمز ایجاد شده در موتور بعنوان تابعی از سرعت مطرح شده باشد، چیزی که به نظر می رسد این است که مدت زمان طبیعی ترمز در سرعت پایین،
بعنوان مثال؛
از 200rmp به 100rmp ، در یک مقایسه تغییر سرعت از 1000rmp به 900rmp ،به طور چشمگیری افزایش می یابد.
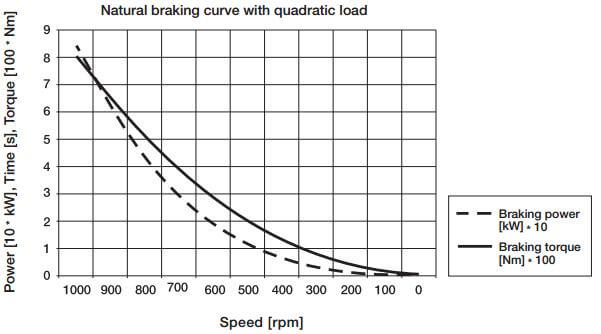
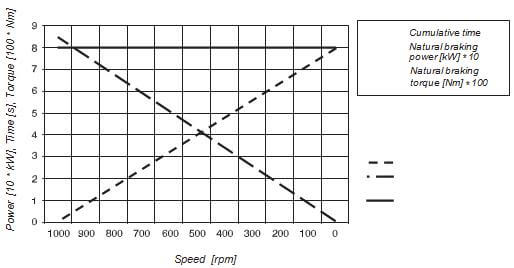
یک منحنی ترمز طبیعی به راحتی می تواند بر اساس سرعت و توان در نقطه نامی استفاده شده در فرمول های (2.5) و (2.6) رسم شود.
الزامات تعیین کننده سیستم مکانیکی برای ترمز در یک زمان مشخص
اجازه دهید تا موردی را در نظر بگیریم که در آن الزامات تعیین کننده سیستم مکانیکی برای ترمز در یک زمان مشخص با سرعتی مشخص است.
- فن 90Kw دارای اینرسی kgm260 می باشد.
- نقطه کار نامی برای فن 1000rmp می باشد.
- 20 ثانیه زمان لازم است تا فن متوقف شود.
بیشترین (ماکزیمم) اثر ترمز طبیعی توسط مشخصه های بار، در آغاز فرآیند ترمز ایجاد می شود. ماکزیمم انرژی اینرسی را می توان از رابطه (2.12) محاسبه کرد.
متوسط توان ترمز را نیز می توان از تقسیم انرژی ترمز بر زمان بدست آورد. البته این مقدار، از جهت ایمنی، با توجه به مشخصه های بار فن، در نظر گرفته نمی شود.
(2.12): Wkin = 12 × J ×ω2 = 12 × J × (n60 × 2π)2 = P × t
(2.13): P = 12 × J × (n60 × 2π)2 × 1t = 12 × 60 × (100060 ×2π)2 × 120 = 16.4 kW
هنگامی که چاپر ترمز برای مقدار 16.4 kW سایزبندی شده و ظرفیت ترمز موتور در سرعتی بالاتر به مراتب بیشتر از 16.4 kW باشد، درایو می بایست دارای یک تابع نظارتی برای حداکثر توان بازسازی باشد. این تابع در دسترس برخی از درایو ها از جمله سانترنو ایتالیا سری پنتا (sinus penta) می باشد.
انتخاب چاپر ترمز و انرژی ترمز
اگر کسی بخواهد برای مدت زمان مشخصی از فرآیند ترمز، در تعیین ابعاد چاپر ترمز بهینه سازی کند، با توجه به شکل (2.3) قادر به انجام آن خواهد بود.
سرعت به طور سریع از 1000rpm به 500rpm بدون اعمال ترمز اضافی کاهش خواهد یافت.
ماکزیمم اثر ترمز طبیعی در ابتدای فرآیند ترمز ایجاد می شود. این مسئله به وضوح نشان می دهد که لازم نیست تا برای شروع ترمز، موتور در وهله اول دارای توان فوق الذکر 16kW باشد. چنانچه در شکل (2.3) مشاهده می کنید، سرعت از 1000rpm به 500rpm بدون اعمال هیچگونه ترمز اضافی در کمتر از 10 ثانیه کاهش می یابد.
از نظر زمان گشتاور بار تنها 25% مقدار نامی و انرژی جنبشی در فن هم تنها 25% انرژی در 1000rpm می باشد.
اگر محاسبات انجام شده در 1000rpm مجددا در 500rpm هم تکرار شوند، نکته ای که شایان ذکر است این است که توان ترمز به منظور دستیابی به شتاب از 500rpm به 0rpm به 8kW میل می کند. بنابر اظهار محاسبات قبلی این مسئله هم از جهت ایمنی است، زیرا منحنی ترمز طبیعی ایجاد شده توسط مشخصه های بار در نظر گرفته نمی شود.
به طور خلاصه؛
هدف یک مدت زمان شتاب 20 ثانیه ای از 1000rpm به 0rpm، این است که اندازه مناسب چاپر و مقاومت ترمز را برای 8.2kW دریابیم. تنظیم توان بازسازی درایو محدود به 8.2kW سطح توان ترمز را بر سطحی مناسب تنظیم می کند.
(2.14): Wkin = 12 × J × ω2 = 12 × J × (n60 × 2π)2 = P × t
(2.15): P= 12 × J × (n60 × 2π)2 × 1t = 12 × 60 × (50060 ×2π)2 × 110 = 8.2kW
خلاصه و حمع بندی
سخن آخر
دو نوع بار اصلی وجود دارد: گشتاور ثابت (VTC) و گشتاور متغیر (V/F).
برنامه های گشتاور ثابت (VTC):
- مشخصه های گشتاور بار به سرعت بستکی ندارند. گشتاور بار تقریبا در همان محدوده کلی سرعت باقی می ماند.
- توان به صورت خطی، با افزایش سرعت افزایش می یابد و بالعکس.
- برنامه های رایج گشتاور ثابت: جرثقیل ها،آسانسور ها،پرس ها و نوار نقاله ها.
برنامه های گشتاور متغیر (V/F) یا درجه دوم:
- گشتاور بار متناسب با سرعت به نسبت 2n افزایش می یابد.
- هنگامی که سرعت افزایش می یابد، توان هم متناسب با سرعت به نسبت 3n افزایش می یابد.
- برنامه های رایج گشتاور متغیر (V/F) : پمپ ها و فن ها.
ارزیابی انرژی ترمز:
مشخصه های بار گشتاور متغیر (V/F) به معنای کاهش سرعت طبیعی و سریع بین 50-100% سرعت نامی است که هنگامیکه برآورد توان ترمز موردنیاز است، می بایست مورد استفاده قرار گیرد.
گشتاور متغیر (V/F) بدان معناست که در سرعت های پایین، کاهش سرعت طبیعی عمدتا به دلیل اصطکاک است.
مشخصه های گشتاور بار ثابت، کاهش سرعت طبیعی به طور ثابت است.
توان ترمز تابعی از سرعت و گشتاور در نقطه کار مشخص شده است.
تعیین و سایز بندی چاپر ترمز با توجه به اوج توان ترمز اغلب منجر به دستیابی به ابعادی بزرگ تر از ابعاد استاندارد می گردد.
توان ترمز، تابعی از جریان نامی (گشتاور) و توان نامی موتور نیست.
اگر هنگام شروع فرآیند ترمز گشتاور بار از بین رفت، پس بنابراین اثر ترمز ناچیز است،
اما می تواند ابعاد چاپر ترمز را تحت تأثیر قرار دهد.
“نظرات شما را میخوانیم و به آن ها فکر میکنیم.
با تشکر از مطالعه شما .الکترومارکت را به اشتراک بگذارید.






باسلام مطالب بسیار خوب و آموزنده هستند با تشکر از نیت خوب شما