
سلام خدمت دوستان و همراهان عزیز الکترو مارکت
0 تا 100 وکتور کنترل
سعی کردم در مقاله کاملترین مطالب رو در مورد کنترل برداری (FOC) یا وکتور کنترل ارایه نمایم.
کنترل برداری (Vector Control)
کنترل برداری که همچنین کنترل میدانی (Field-oriented control-FOC) هم نامیده میشود، یک روش کنترل درایو فرکانس متغیر (VFD) است که در آن جریان های استاتور یک موتور الکتریکی جریان متناوب (AC) سه فاز، به صورت دو مؤلفه عمود بر هم که میتوانند در یک بردار تجسم شوند، شرح داده میشوند.
یکی از مؤلفه ها، شار مغناطیسی موتور را تعیین کرده و دیگری گشتاور را مشخص میکند.
این سیستم کنترل اینورتر، مؤلفه جریان مربوطه ناشی از شار و گشتاور ایجاد شده توسط کنترل سرعت اینورتر را محاسبه میکند. به طور معمول، کنترل کننده های تناسبی- انتگرالی برای اندازه گیری مؤلفه های جریان در مقادیر مبنای خود استفاده میشوند.
مدولاسیون پهنای پالس اینورتر فرکانس متغیر، ترانزیستوری را مشخص می کند.
که بر اساس منابع ولتاژ استاتور سوئیچ میشود، که این منابع خروجی کنترل کننده های جریان PI هستند (وکتور کنترل).
کنترل برداری (FOC) برای کنترل موتورهای جریان متناوب (AC) سنکرون و القایی استفاده میشود.
در اصل برای کاربردهای موتور با راندمان بالا که نیاز به کار مداوم و بدون تنش (اعوجاج) در محدوده سرعت کامل و تولید گشتاور کامل در سرعت صفر دارند و دارای عملکرد دینامیکی بالا از جمله کاهش شتاب و سرعت هستند، توسعه یافته است.
با این حال، کنترل برداری به مرور برای کاربردهایی با کارایی پایین تر
با توجه به ارجعیت کاهش اندازه موتور FOC،کاهش هزینه و مصرف برق نیز حاصل می گردد.
در نهایت انتظار میرود که با افزایش قدرت محاسباتی این ریزپردازنده ها، تقریباً در سراسر جهان وکتور کنترل جایگزین کنترل تک متغیره اسکالر ولت بر هرتز (V/f) شود.
تاریخچه وکتور کنترل
ک. هاس از دانشگاه فنی دارمشتات و اف (Technische Universität Darmstadt’s K. Hasse) و بلاسک از زیمنس (Siemens’ F. Blaschke) ، پیشگامان کنترل برداری (وکتور کنترل) موتور جریان متناوب (AC) بودند.
که در سال 1968 و در اوایل دهه 1970، هاس در مورد پیشنهاد وکتور کنترل (کنترل برداری) غیر مستقیم و
بلاسک از نظر پیشنهاد وکتور کنترل (کنترل برداری) مستقیم شروع به کار کردند.
ورنر لئونارد از دانشگاه فنی براونشوایگ (Braunschweig)، تکنیکها و روشهای کنترل برداری (FOC) را بیشتر توسعه داد که ابزاری در راه گشایی فرصتهایی برای جایگزینی و بازاریابی اینورتر جریان متناوب (AC) در جایگزین رقابتی با اینورتر های جریان مستقیم (DC) بود.
با این حال، تکنولوژی وکتور کنترل تا پس از تجاری سازی و توسعه ریز پردازنده ها وجود نداشت که در اوایل دهه 1980 این توسعه رخ داد که هدف کلی اینورتر های جریان متناوب (AC) در دسترس قرار گرفت و به بار نشت.
هنوز موانع و مشکلات بسیاری برای استفاده از وکتور کنترل وجود داشت”
استفاده از کنترل برداری (FOC) برای کاربردهای اینورتر جریان متناوب (AC) شامل هزینه و پیچیدگی بسیار زیاد و قابلیت نگهداری پایین تری نسبت به درایوهای جریان مستقیم (DC) بود و بسیاری از قطعات الکترونیکی تا آن زمان از نظر سنسورها، تقویت کنندهها و غیره، مورد نیاز وکتور کنترل (FOC) بوده اند که نیاز به تامین و توسعه بود.
روش تبدیل پارک (Park transformation) مدت طولانی است که به طور گستردهای در تجزیه و تحلیل و مطالعه ماشینهای سنکرون و القایی استفاده میشود. تاکنون این تبدیل، تنها مفهوم بسیار مهم و در عین حال مورد نیاز برای درک درست نحوه کار وکتور کنترل (FOC) بوده است، این مفهوم برای اولین بار در مقالهای توسط رابرت اچ. پارک (Robert H. Park) در سال 1929 مفهوم سازی و معرفی شد.
مقاله پارک، از نظر تأثیر از میان تمام مقالات مهندسی برق مرتبط که تا قرن بیستم منتشر شده بودند، رتبه دوم را به خود اختصاص داد.
نوآوری در کار پارک شامل قابلیت و توانایی وی برای تبدیل هر مجموعه معادله دیفرانسیل خطی دستگاهی مرتبط، از یک مجموعه با ضرایب متغیر زمانی به مجموعه دیگری با ضرایب ثابت زمانی.
مرور فنی
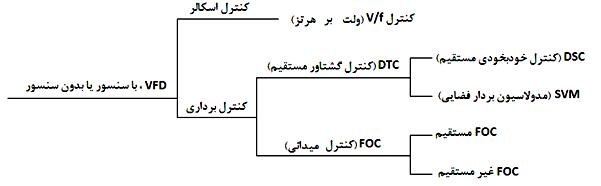
بررسی اجمالی پایگاهها یا پلت فرم های کلیدی کنترل اینورتر رقابتی عبارتند از:
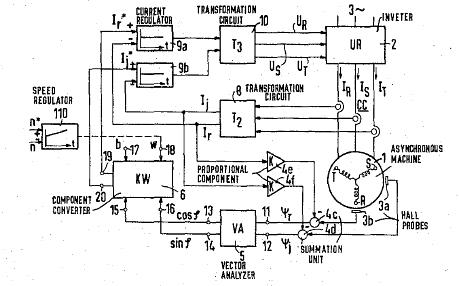
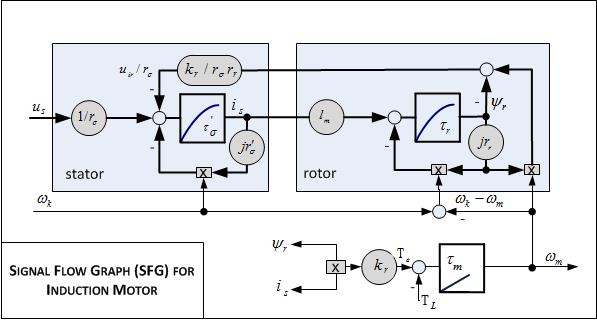
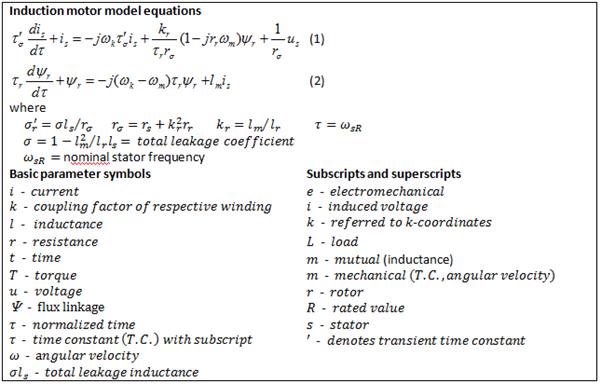
در حالی که تجزیه و تحلیل کنترل های اینورتر جریان متناوب (AC) میتواند کاملاً از لحاظ فنی انجام شود، با این حال این تجزیه و تحلیل همواره با مدل سازی مدار درایو – موتور درگیر در امتداد خطوط، همراه با نمودار جریان سیگنال و معادلات شروع میشود.
در سیستم وکتور کنترل ، یک موتور AC القایی و یا سنکرون در تمامی شرایط عملیات مانند یک موتور DC تحریک شده مستقل کنترل میشود .
به عبارت دیگر، موتور AC مانند یک موتور DC عمل میکند
که در آن پیوستگی شار میدان مغناطیسی (Field flux linkage) و پیوستگی شار آرمیچر (Armature flux linkage)
توسط میدان مربوطه ایجاد شده و جریانهای آرمیچر (یا مؤلفه گشتاور) به طور عمودی در امتداد هم قرار میگیرند،
به طوری که هنگامی که گشتاور کنترل میشود، پ
یوستگی شار میدان مغناطیسی تحت تأثیر قرار نمیگیرد،
از این رو واکنش گشتاور دینامیک را امکان پذیر میسازد.
بر این اساس، وکتور کنترل، یک خروجی ولتاژ موتور PWM سه فاز را تولید میکند که از یک بردار ولتاژ مختلط مشتق میشود که یک بردار جریان مختلط را که از ورودی جریان استاتور سه فاز موتور مشتق شده است از طریق جابه جایی های ممتد بین دو سیستم سه فاز وابسته به سرعت و زمان و سیستم ثابت زمانی با چهار چوب مرجع دورانی با مختصات دو بعدی این بردارها، کنترل میکند.
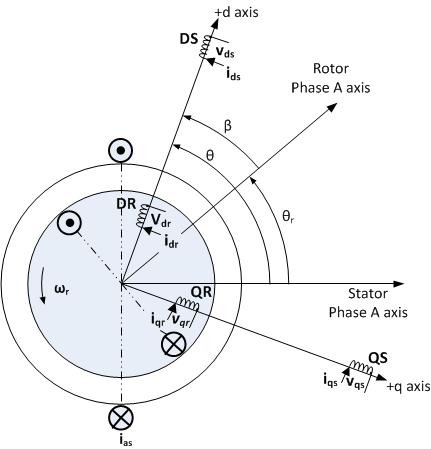
چنین بردار فضایی مختلط جریان استاتور را میتوان در یک سیستم مختصات (d, q) با مؤلفههای عمود بر هم در راستای محورهای d (مستقیم) و q (عمودی) تعیین کرد به طوری که مؤلفه پیوستگی شار میدان مغناطیسی جریان، در طول محور d همتراز میشود و مؤلفه گشتاور جریان هم در امتداد محور q همتراز میگردد.
سیستم مختصات (d, q) موتور القایی را میتوان به سیستم سینوسی سه فاز لحظه ای (a, b, c) موتور همان طور که در تصویر نشان داده شده است، اضافه کرد (فازهای b و c برای وضوح بیشتر نشان داده نشدهاند). مؤلفه های بردار جریان این سیستم (d, q)، کنترل متعارف مانند کنترل تناسبی-انتگرالی (PI) را همانند یک موتور جریان مستقیم (DC) امکانپذیر میسازند.
روشهای ترسیم در ارتباط با سیستم مختصات (d, q) به طور معمول شامل موارد زیر میشوند:
- روش ترسیم مستقیم یا موافق حاصل از جریان های لحظه ای با نمایش بردار فضایی مختلط جریان استاتور (a, b, c) سیستم سینوسی سه فاز.
- روش ترسیم مستقیم یا موافق سه فاز به دو فاز، طرح (a, b, c) به (β ,α) با استفاده از تبدیل کلارک (Clarke) . پیاده سازی های کنترل برداری معمولاً موتور بدون اتصال به زمین را با جریان سه فاز متعادل فرض میکنند، به طوری که تنها دو فاز جریان موتور باید حس شوند. همچنین، طرح برگشتی دو فاز به سه فاز، طرح (β ,α) به (a, b, c) از مدولاتور یا تعدیل کننده PWM بردار فضایی یا تبدیل کلارک معکوس و تعدیل کنندههای PWM دیگر استفاده میکند.
- طرح ریزی های مستقیم و برگشتی دو فاز به دو فاز، (β ,α) به (d, q) و (d, q) به (β ,α) با استفاده از تبدیل های پارک و پارک معکوس.
با این حال استفاده از طرح های ترسیم سه به دو،
(a, b, c) به (d, q) و طرح ترسیم معکوس برای مراجع نا متعارف به شمار نمیرود.
در حالی که دوران سیستم مختصات (d, q) میتواند به طور دلخواه با هر سرعتی تنظیم شود،
سه سرعت ارجع و یا چارچوب مرجع وجود دارد:
- چارچوب مرجع ثابت که در آن سیستم مختصات (d, q) چرخش و دَوَران نمییابد؛
- چارچوب مرجع دَوَران همزمان که در آن سیستم مختصات (d, q) با سرعت سنکرون، دوران مییابند؛
- چارچوب مرجع روتور که در آن سیستم مختصات (d, q) با سرعت روتور دوران مییابد.
]در نتیجه، جریانهای گشتاور و میدان مغناطیسی مجزا ساز میتوانند
از ورودی های جریان استاتور پردازش نشده برای توسعه الگوریتم کنترل مشتق شوند.
در حالی که مؤلفه های میدان مغناطیسی و گشتاور مغناطیسی در موتورهای جریان مستقیم (DC) میتوانند نسبتاً به سادگی به طور جداگانه با کنترل جریان های میدان مغناطیسی و آرمیچر مربوطه عمل کنند، کنترل اقتصادی و صرفه جویی انرژی حاصله از جایگزینی موتورهای جریان متناوب (AC) در کاربرد سرعت متغیر برای توسعه کنترل های مبتنی بر میکروپروسسور (میکروپردازشگر) با تمام درایوهای جریان متناوب (AC) حاضر با استفاده از فن آوری قدرتمند DSP (پردازش سیگنال دیجیتال) الزامی است.
اینورتر ها میتوانند به صورت کنترل برداری (FOC)
بدون سنسور مدار باز (open loop)
یا مدار بسته (close loop) اجرا شوند،
محدودیت کلیدی عملیات مدار باز حداقل سرعت ممکن در گشتاور 100% است،
یعنی در حدود 8/0 هرتز در مقایسه با وقفه برای عملیات مدار بسته میباشد.
دو روش کنترل برداری شامل کنترل برداری مستقیم یا فیدبک (Feedback vector control) (DFOC) و کنترل برداری غیر مستقیم یا پیشخورد (Feedforward vector control) (IFOC) وجود دارد؛
معمولاً کنترل برداری غیر مستقیم یا پیشخورد (IFOC) بسیار مورد استفاده قرار میگیرد.
زیرا در حالت مدار بسته مانند درایو ها بسیار راحت در سراسر محدوده سرعت از سرعت صفر تا سرعت بالای تضعیف میدان مغناطیسی عمل میکند.
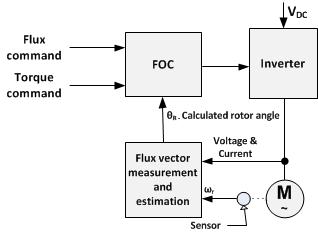
در کنترل برداری مستقیم یا فیدبک (DFOC)، مقدار شار و سیگنالهای بازخورد زاویه به طور مستقیم با استفاده از مدلهای به اصطلاح جریان یا ولتاژ محاسبه میشوند.
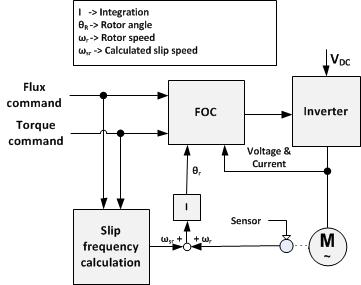
در کنترل برداری غیر مستقیم یا پیشخورد (IFOC)، پیشخورد زاویه فضای شار و سیگنالهای مقدار شار، ابتدا جریانهای استاتور و سرعت روتور را اندازه گیری کرده و سپس مشتق زاویه فضای شار مناسب با جمع زاویه روتور مربوط به سرعت روتور و مقدار مرجع محاسبه شده زاویه لغزش مربوط به فرکانس لغزش را اندازه گیری میکنند.
کنترل بدون سنسور (دیاگرام بلوکی FOC بدون سنسور) اینورتر های جریان متناوب (AC) از جهت ملاحظات هزینه و قابلیت اطمینان جذاب و جالب توجه میباشد.
کنترل بدون سنسور نیاز به استخراج اطلاعات سرعت روتور از جریان ها و ولتاژ استاتور اندازه گیری شده
در ترکیب با برآوردگر مدار باز و یا مشاهده گر مدار بسته دارد.
کاربرد
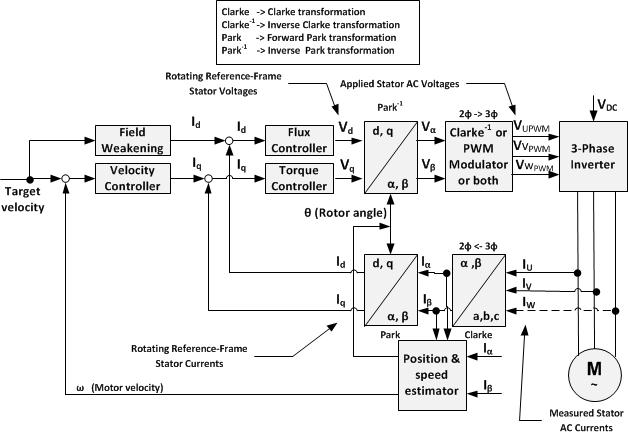
- جریانهای فازی استاتور اندازه گیری میشوند و به بردار فضایی مختلط در سیستم مختصات (a, b, c) تبدیل میشوند.
- جریان به سیستم مختصات (β ,α) تبدیل میشود. به یک سیستم مختصات دورانی در چارچوب مرجع روتور تبدیل میشود، موقعیت روتور توسط یکپارچهسازی سرعت با استفاده از ابزار حسگر اندازه گیری سرعت استنتاج میشود.
- بردار پیوستگی شار روتور با ضرب بردار جریان استاتور با القای مغناطیسی Lm و نتیجه فیلترینگ پایین گذر با روتور زمان ثابت بدون بار Lf/Rr، یعنی نسبت اندوکتانس (ضریب القای) روتور (Rotor inductance) به مقاومت روتور تخمین زده میشود.
- بردار جریان تبدیل به سیستم مختصات (d, q) میشود.
- مؤلفه محور d بردار جریان استاتور برای کنترل پیوستگی شار روتور استفاده می شود و مؤلفه مجازی محور q برای کنترل گشتاور موتور استفاده میشود. در حالی که کنترل کنندههای تناسبی-انتگرالی (PI) میتوانند برای کنترل این جریانها مورد استفاده قرار گیرند؛ کنترل جریان نوع بنگ بنگ (Bang-bang type current control)، عملکرد دینامیک بهتری را فراهم میکند.
- کنترل کنندههای تناسبی-انتگرالی (PI)، مؤلفههای ولتاژ مختصات (d, q) را ارائه میکنند. یک دوره مجزا گاهی اوقات به خروجی کنترل کننده به منظور بهبود عملکرد کنترل اضافه میشود تا جفت شدگی متقابل و یا تغییرات بزرگ و سریع در سرعت، پیوستگی جریان و شار را کاهش دهد. همچنین کنترل کننده تناسبی-انتگرالی (PI) گاهی اوقات نیاز به فیلتر پایین گذر در ورودی یا خروجی دارد تا از موج جریان به دلیل سوئیچینگ ترانزیستور از تقویت بیش از حد و بی ثبات کردن کنترل جلوگیری کند. با این حال، این فیلترینگ همچنین عملکرد سیستم کنترل دینامیکی را محدود میکند. فرکانس سوئیچینگ بالا (معمولاً بیش از 10 کیلو هرتز) معمولاً برای به حداقل رساندن نیاز به فیلترینگ برای درایوهای با عملکرد بالا مانند درایوهای سروو (Servo drives) الزامی است.
- مؤلفه های ولتاژ از سیستم مختصات (d, q) به سیستم مختصات (β ,α) تبدیل میشوند.
- مؤلفه های ولتاژ از سیستم مختصات (β ,α) به سیستم مختصات (a, b, c) تبدیل میشوند یا با مدولاتور PWM تغذیه میشوند، و یا هر دو برای سیگنالینگ به بخش اینورتر یا مبدل برق انجام میشوند.
کاربرد وکتور کنترل در صنعت پلاستیک
سرعت یکنواخت پرس تولید ظروف یکبار مصرف در زمان بالا رفتن پرس و پایین آمدن پرس، در این کاربرد پرس ترموفرمینگ در زمان بالا رفتن متحمل فشار زیادی میشود و در واقع باید وزنی حدود 1 تن را بالا ببرد و در زمان پایین آمدن باید بر نیروی جاذبه غلبه کند و مانع افزایش سرعت پایین آمدن پرس شود.
ابعاد قابل توجه کاربرد وکتور کنترل:
- اندازه گیری سرعت یا موقعیت و یا نوعی از برآورد مورد نیاز است.
- گشتاور و شار را میتوان با سرعت منطقی، کمتر از 5-10 میلی ثانیه، با تغییر مراجع تغییر داد.
- واکنش پله ای تا حدی فراتر میرود چنانچه کنترل تناسبی-انتگرالی (PI) استفاده شود.
- فرکانس سوئیچینگ ترانزیستورها معمولاً ثابت میباشد و توسط مدولاتور تعیین و تنظیم میشود.
- دقت گشتاور بستگی به دقت پارامترهای موتور مورد استفاده در کنترل دارد.
- بنابراین خطاهای بزرگ اغلب به دلیل تغییرات درجه حرارت روتور ایجاد میشوند.
- عملکرد پردازنده منطقی الزامی است؛ معمولاً الگوریتم کنترل باید حداقل هر میلی ثانیه محاسبه شود.
اگرچه الگوریتم کنترل بردار نسبت به کنترل مستقیم گشتاور (DTC) بسیار پیچیده تر است،
نیازی نیست این الگوریتم به همان اندازه تکرار الگوریتم کنترل مستقیم گشتاور (DTC) محاسبه شود.
همچنین لازم نیست سنسورهای جریان از بهترین سنسورها در بازار باشند.
بنابراین هر چقدر هزینه این پردازنده و دیگر سخت افزارهای کنترل کمتر باشد،
برای کاربردهای مختلف مناسب میباشد که در آن عملکرد نهایی کنترل مستقیم گشتاور (DTC) مورد نیاز و الزامی نمیباشد.
گروه مهندسی الکترومارکت در خدمت شما است.
متشکرم که تا انتهای این مقاله با ما بودید منتظر نظرات خوبتون هستم.
نظرات شما دوستان باعث ارتقای سطح کیفی الکترومارکت میگردد.
ما در 24 ساعت از 7 روز هفته منتظر شنیدن صدای شما هستیم
02165292580
02165295301
سلام،مهندس توی دستگاه پلاستیک،بجای اینکه از مود وکتور استفاده کنیم،نمیشد بصورت مکانیکی دور رو پایین بیاریم؟مثلا با استفاده از گیربکس و یک موتور دور پایین.
البته فک کنم همچین گیربکسی وجود نداشته باشه که دور رو انقدر بیاره پایین!
یه سوال دیگه اینکه،اگه تو حالت v/f فرکانس رو مثلا روی ۲ هرتز تنظیم کنیم دیگه ماکزیمم توان رو نداریم نه؟
بسیار ممنونم از زحمتی که کشیدید و این مقاله بسیار عالی رو منتشر کردید.
آرزوی توفیق و سلامتی دارم براتون
عالی وپرمحتوا واموزنده بود ممنونم
ممنون از نظر شما .
ممنون ومتشکراز حسن انتخاب شما ومقاله پرمحتوای شما که باعث میشه نگرش بهتری دراستفاده ازاینورترها درصنعت بشود(سپاس)
خواهش میکنم .خوشحالم که مفید بوده.
مطالب بسیار خوبی را در وب سایت خود گردآوری نموده اید. آیا تمایل دارید که جهت برگزاری یک سمینار آموزشی برای مدیران برق و انرژی صنایع تحت پوشش شرکت توزیع برق استان مازندران با موضوع کاربرد و مزایای درایوهای فرکانس متغیر در صنعت برنامه ریزی و از جنابعالی دعوت کنیم؟
سلام خدمت شما دوست عزیز.
ممنون از حسن توجه شما.
در سال جاری برنامه ای برای کلاس های آموزشی و سمینارهای آموزشی ندارم به امید خدا در سال ۹۶ مبحث آموزش اینورتر و سافت استارتر را به صورت پروژه محور استارت میزنیم.
در مورد شرکت و برگزاری سمینارهای آموزشی نیز به یاری پروردگار در سال ۹۶ میتونم با قدرت تمام در خدمت شما و جامعه دانش پژوه باشم.
مقاله پرمحتوایی بود.
ممنون از حسن توجه شما دوست عزیز.