درایو Yaskawa L1000A: راهنمای جامع پارامتردهی برای عملکرد بهینه آسانسور
ارائه شده توسط الکترومارکت
در عرصه پیچیده و پیشرفته آسانسور، اهمیت حرکت نرم و بیصدا، مصرف بهینه انرژی و قابلیت اطمینان بالا بیش از هر زمان دیگری مشهود است. درایوهای Yaskawa L1000A، محصول برجسته شرکت یاسکاوا (Yaskawa)، پاسخی قاطع به این نیازها هستند. این درایوها با طراحی هدفمند برای کاربردهای آسانسوری، امکان همکاری با هر دو نوع موتور آسنکرون (القایی) و موتورهای سنکرون را فراهم میکنند. این قابلیت شامل هر دو حالت کنترل حلقه باز (بدون نیاز به انکودر) و حلقه بسته (با همراهی انکودر) میشود.
الکترومارکت مفتخر است که به عنوان یک مرجع تخصصی و قابل اعتماد، درایوهای Yaskawa L1000A را به همراه پشتیبانی فنی جامع و مشاورههای تخصصی به شما مشتریان گرامی ارائه دهد. با انتخاب این درایوهای پیشرفته، نه تنها کیفیت و ایمنی آسانسور خود را ارتقا میبخشید، بلکه در جهت کاهش هزینههای عملیاتی و افزایش بازدهی سیستم گام برمیدارید. برای کسب اطلاعات بیشتر درباره سایر محصولات و خدمات الکترومارکت در حوزه اتوماسیون صنعتی، میتوانید به بخشهای مختلف وبلاگ الکترومارکت مراجعه کنید.
این راهنمای جامع، با هدف ارائه یک دید کلی و سریع از چگونگی پیادهسازی و پارامتردهی درایو Yaskawa L1000A در یک تابلوی آسانسور استاندارد تدوین شده است. لازم به ذکر است که این دستورالعمل، یک مقدمه برای آشنایی است و به هیچ عنوان جایگزین مطالعه کامل و دقیق دفترچه راهنمای فنی درایو نیست. به خصوص برای پروژههای تجاری و صنعتی که نیازمند دقت و تنظیمات بسیار خاص هستند، مراجعه به دفترچه راهنمای کامل درایو Yaskawa L1000A ضروری است.
🧮 محاسبه سریع و دقیق مقاومت ترمز در درایوها
اگر در پروژههای صنعتی با درایو سروکار دارید، انتخاب صحیح مقاومت ترمز یکی از مراحل حیاتی طراحی است. با استفاده از این ابزار محاسبه آنلاین، میتوانید بهسادگی مقدار مقاومت و توان مناسب را بر اساس مشخصات سیستم خود بهدست آورید.
📌 برای استفاده از ماشین حساب، به لینک زیر مراجعه کنید:
محاسبه مقاومت و توان مقاومت ترمز در درایو
شناخت سختافزار درایو Yaskawa L1000A
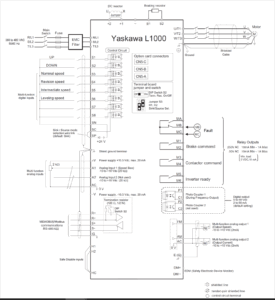
درک صحیح از ساختار و پایههای ورودی و خروجی درایو Yaskawa L1000A، گام نخست در هرگونه عملیات سیمبندی و راهاندازی است. نقشهی جامع سیمبندی درایو، بیانگر آرایش ترمینالها و ارتباطات الکتریکی آن است.
ترمینالهای کنترلی و عملکرد پیشفرض:
ورودیها و خروجیهای کنترلی درایو، به صورت پیشفرض در کارخانه تنظیم شدهاند. این تنظیمات در صورت نیاز و بسته به کاربرد خاص، قابل تغییر هستند.
ورودیهای فرمان (S1 تا S8):
از ترمینالهای ورودی S1 تا S8 برای ارسال فرمانهای مختلف به درایو استفاده میشود. این ورودیها، نقش رابط بین سیستم کنترل آسانسور و درایو را ایفا میکنند.
نحوه اتصال ترمینالهای SN، SC و SP (حالات Sink و Source):
به عنوان مثال، اگر قصد دارید از منبع تغذیه 24 ولت داخلی درایو و در حالت Sink استفاده کنید، کافیست ترمینالهای SC و SP را به یکدیگر متصل نمایید و از ترمینال SN به عنوان پایه مشترک برای تمامی ورودیهای S1 تا S8 بهره ببرید. این پیکربندی، انعطافپذیری بالایی را برای یکپارچهسازی با انواع سیستمهای کنترلی فراهم میکند.
ترمینالهای ایمنی (H1، H2، HC):
ترمینالهای H1، H2 و HC برای جداسازی خروجی درایو از بار یا موتور به منظور افزایش ایمنی و حفاظت از سیستم به کار میروند.

خروجیهای کنترلی (رلهای و ترانزیستوری):
درایو Yaskawa L1000A دارای خروجیهای کنترلی در دو نوع رلهای و ترانزیستوری است. این درایو مجهز به 4 خروجی رلهای و 2 خروجی ترانزیستوری است که به صورت داخلی روی برد کنترلی تعبیه شدهاند:
-
رله MC-MB-MA: این رلهها در زمان بروز هرگونه خطا (فالت) در سیستم، فعال میشوند و میتوانند به عنوان نشانگر وضعیت یا برای قطع مدار ایمنی استفاده شوند.
-
رله M1-M2: این خروجیها برای کنترل ترمز مکانیکی تعبیه شده روی موتور بالابر کاربرد دارند. این رلهها اطمینان میدهند که ترمز موتور در زمان مناسب فعال یا آزاد شود.
-
رله M3-M4: در صورتی که خروجی درایو از طریق کنتاکتور به موتور بالابر متصل باشد، رله M3-M4 برای فرمان دادن به این کنتاکتور به کار میرود. این امر امکان کنترل دقیقتر اتصال و قطع موتور از درایو را فراهم میکند.
-
رله M5-M6: این رله به صورت پیشفرض برای نشان دادن وضعیت “آماده به کار بودن” درایو تنظیم شده است، اما میتوان عملکرد آن را نیز از طریق پارامترهای مربوطه برنامهریزی کرد.
تمام رلههای خروجی درایو را میتوان به دلخواه و بر اساس نیازهای پروژه، از طریق پارامترهای مربوطه برنامهریزی کرد.
ورودیهای آنالوگ (A1 و A2):
ترمینال ورودی A1 به عنوان ورودی آنالوگ 1 و ترمینال ورودی A2 به عنوان ورودی آنالوگ 2 شناخته میشوند. در بسیاری از کاربردهای کنترلی درایو، میتوان از ورودیهای A1 و A2 برای تنظیم و تعیین سرعت موتور استفاده نمود. این ورودیها امکان کنترل دقیقتر سرعت را بر اساس سیگنالهای آنالوگ خارجی فراهم میکنند.
ترمینالهای مقاومت ترمز (B1 و B2):
ترمینالهای B1 و B2 برای اتصال مقاومت ترمز (Braking Resistor) طراحی شدهاند. در مواقعی که موتور و بار متصل به آن، باعث میشوند که موتور به حالت ژنراتوری وارد شود و به جای مصرف انرژی، تولید انرژی کند، از مقاومت ترمز برای اتلاف توان مازاد تولید شده استفاده میشود. این وضعیت معمولاً زمانی رخ میدهد که درایو در حال کاهش سرعت موتور است. استفاده از مقاومت ترمز به حفظ پایداری سیستم و جلوگیری از افزایش بیش از حد ولتاژ DC باس کمک میکند. برای اطلاع از انواع مقاومتهای ترمز و کاربرد آنها، مقاله “نقش مقاومت ترمز در افزایش کارایی درایوها” را در وبلاگ الکترومارکت از دست ندهید.
ترمینالهای فیلترینگ ولتاژ ورودی (1+ و 2+):
ترمینالهای 1+ و 2+ به طور معمول توسط یک شینه فلزی به یکدیگر متصل شدهاند. اما برای کاهش نویز ولتاژ ورودی درایو، میتوان یک راکتور DC را بین این دو ترمینال وصل نمود. این کار به بهبود کیفیت تغذیه ورودی درایو و افزایش طول عمر آن کمک میکند.
اسلاتهای توسعه (CN5-A, CN5-B, CN5-C):
بر روی برد کنترلی درایو L1000A، سه اسلات آزاد با نامهای CN5-A، CN5-B و CN5-C وجود دارد که کارتهای توسعهای مربوط به درایو به آنها متصل میشوند. به عنوان مثال، کارت انکودر برای سیستمهای حلقه بسته در اسلات CN5-C نصب میگردد. این قابلیت، انعطافپذیری درایو را برای پشتیبانی از ویژگیهای اضافی افزایش میدهد.
پورت ارتباطی RS485:
از ترمینالهای +R و -R و +S و -S برای اتصال درایو L1000A به شبکههای مبتنی بر استاندارد RS485 استفاده میشود. این امکان، یکپارچهسازی درایو با سیستمهای کنترل مرکزی و شبکههای صنعتی را فراهم میسازد.
خروجیهای آنالوگ (FM و AM):
این درایو دارای دو خروجی آنالوگ است. به طور پیشفرض، یکی از آنها (FM) فرکانس خروجی و دیگری (AM) جریان خروجی درایو را نمایش میدهد. ترمینال AC نیز به عنوان ترمینال مشترک برای هر دو خروجی FM و AM عمل میکند. این خروجیها برای مانیتورینگ و فیدبک به سیستمهای دیگر کاربرد دارند.
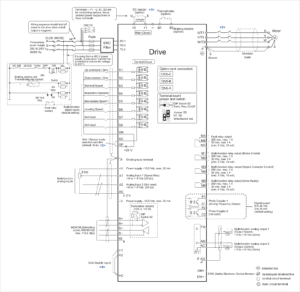
توضیحات ترمینالهای قدرت
ترمینالهای قدرت در درایو Yaskawa L1000A برای اتصال منبع تغذیه ورودی، خروجی به موتور، و تجهیزات جانبی مانند مقاومت ترمز طراحی شدهاند. این ترمینالها شامل موارد زیر هستند:
-
R/L1, S/L2, T/L3: ترمینالهای ورودی قدرت سه فاز. این ترمینالها برای اتصال به منبع تغذیه AC سه فاز (200V یا 400V کلاس) استفاده میشوند. سیمکشی باید با کابلهای مناسب (بر اساس جریان نامی درایو) انجام شود و از فیوز یا MCCB (Molded Case Circuit Breaker) برای حفاظت استفاده گردد. برای جلوگیری از نویز، از کابلهای شیلددار استفاده کنید و زمین را به درستی متصل نمایید.
-
U/T1, V/T2, W/T3: ترمینالهای خروجی قدرت به موتور. این ترمینالها ولتاژ و فرکانس متغیر را به موتور القایی یا سنکرون ارسال میکنند. سیمکشی باید کوتاه باشد (حداکثر 100 متر) و از کابلهای مناسب با عایق قوی استفاده شود. اگر طول کابل بیش از 50 متر باشد، ممکن است نیاز به فیلتر خروجی باشد تا از تداخل الکترومغناطیسی جلوگیری شود.
-
+1, +2: ترمینالهای باس DC مثبت. این ترمینالها برای اتصال راکتور DC خارجی یا واحد ترمز دینامیک استفاده میشوند. به طور پیشفرض، +1 و +2 توسط یک شینه فلزی متصل هستند، اما برای کاهش نویز، شینه را بردارید و راکتور را بین آنها وصل کنید.
-
–: ترمینال باس DC منفی. برای اتصال به مدارهای خارجی مانند واحد ترمز یا اینورترهای بازتولیدی.
-
B1, B2: ترمینالهای مقاومت ترمز. برای اتصال مقاومت خارجی ترمز که انرژی بازتولیدی را اتلاف میکند. توان و مقاومت باید بر اساس محاسبات (مانند ماشین حساب الکترومارکت) انتخاب شود. اگر مقاومت داخلی کافی نباشد، از واحد ترمز خارجی استفاده کنید.
-
⊥ (زمین): ترمینال زمین. برای اتصال به زمین سیستم به منظور ایمنی و کاهش نویز. همیشه از کابل زمین مناسب (حداقل 10 mm²) استفاده کنید و طول آن را کوتاه نگه دارید.
نکته مهم: سیمکشی ترمینالهای قدرت باید توسط تکنسین متخصص انجام شود و از ابزارهای مناسب برای سفت کردن پیچها (گشتاور مشخص: مثلاً 1.2 تا 1.5 Nm برای مدلهای کوچک) استفاده گردد. قبل از روشن کردن، از عدم وجود مدار کوتاه اطمینان حاصل کنید. برای مدلهای بزرگتر (بالای 30 kW)، از بارگذاری مناسب و خنککنندههای خارجی استفاده کنید.
توضیحات کیپد (Digital Operator)
کیپد یا اپراتور دیجیتال L1000A شامل یک نمایشگر LCD یا LED، همراه با کلیدهای فیزیکی برای ناوبری و تنظیم است. چیدمان کیپد به شرح زیر است:

-
نمایشگر: نمایشگر LCD (در مدلهای پیشرفته) یا LED (در مدلهای پایه) برای نمایش پارامترها، مقادیر، وضعیت درایو، و کدهای خطا. نمایشگر معمولاً 5 خطی است و اطلاعات مانند فرکانس خروجی، جریان، ولتاژ، و وضعیت (RUN, STOP, FWD/REV) را نشان میدهد.
-
کلیدها و عملکردها:
-
RUN: شروع عملیات درایو (در حالت LOCAL).
-
STOP: توقف عملیات.
-
FWD/REV: تغییر جهت چرخش (جلو/عقب یا Up/Down در آسانسور).
-
UP/DOWN: ناوبری در منوها، افزایش/کاهش مقادیر پارامترها.
-
LEFT/RIGHT: جابجایی بین ارقام یا منوهای زیرمجموعه.
-
ENTER: تأیید انتخاب یا ذخیره پارامتر.
-
ESC: بازگشت به منوی قبلی بدون ذخیره.
-
RESET: ریست خطاها (فالتها).
-
LO/RE: سوئیچ بین LOCAL (کنترل از کیپد) و REMOTE (کنترل خارجی).
-
ALM: نشانگر LED برای هشدارها یا خطاها.
-
DRV: نشانگر LED برای حالت درایو.
-
ناوبری منوها: با استفاده از دکمههای جهت بالا و جهت پایین بر روی این پنل، میتوانید وارد منوهای اصلی شوید. چندین منوی اصلی وجود دارد از جمله PAR (پارامترها)، Mon (مانیتورینگ)، ATUN (اتوتیون)، Verify و STUP (راهاندازی).
روشهای پارامتردهی به درایو Yaskawa L1000A
پارامتردهی صحیح، کلید اصلی برای بهرهبرداری کامل از قابلیتهای درایو Yaskawa L1000A است. دو روش اصلی برای تغییر و تنظیم پارامترهای این درایو وجود دارد:
-
استفاده از نرمافزار DriveWizard: با استفاده از نرمافزار تخصصی DriveWizard و یک کابل USB تیپ B، میتوانید به راحتی از طریق یک کامپیوتر شخصی به درایو متصل شده و تمامی پارامترها را تغییر دهید. این روش، امکان پیکربندی سریع و دقیق، ذخیرهسازی تنظیمات و عیبیابی پیشرفته را فراهم میکند.
-
استفاده از پنل اپراتوری (Digital Operator): روش دیگر برای تغییر پارامترها، استفاده از پنل موجود بر روی خود درایو است. این پنل که با نام Digital Operator شناخته میشود، در دو مدل LED و LCD موجود است.
با استفاده از دکمههای جهت بالا و جهت پایین بر روی این پنل، میتوانید وارد منوهای اصلی شوید. چندین منوی اصلی وجود دارد از جمله PAR (پارامترها)، Mon (مانیتورینگ)، ATUN (اتوتیون)، Verify و STUP (راهاندازی).
به عنوان مثال، برای تغییر مقدار یک پارامتر، وارد منوی PAR شوید و کلید Enter را فشار دهید. اولین پارامتر (A1.00) نمایش داده میشود. با استفاده از کلیدهای جهت بالا، پایین و حرکت به راست (برای جابجایی بین ارقام پارامتر)، میتوانید پارامتر مورد نظر خود را انتخاب کنید.
برای تغییر مقدار یک پارامتر، پس از انتخاب آن، کلید Enter را فشار دهید، مقدار جدید را وارد کنید و برای ذخیره شدن تغییرات، دوباره کلید Enter را فشار دهید. از کلید ESC نیز برای خروج از منوها استفاده میشود.
معرفی گروه پارامترهای درایو Yaskawa L1000A
درایو Yaskawa L1000A دارای یک ساختار پارامتردهی گروهی است که تنظیمات مختلف را در دستههای منطقی قرار میدهد. این دستهبندی، فرآیند یافتن و تنظیم پارامترها را سادهتر میکند. جدول زیر، گروه پارامترهای اصلی و توضیح مختصر آنها را نشان میدهد:
|
گروه پارامتر |
توضیح |
|
A1 |
تنظیمات اولیه و اساسی درایو، شامل انتخاب زبان و سطح دسترسی. |
|
A2 |
پارامترهای کاربری (User Parameters). |
|
B1 |
پارامترهای مربوط به انتخاب حالت کارکرد درایو و مراجع فرمان. |
|
B2 |
جبران فلوی مغناطیسی. |
|
B6 |
Dwell: برای حفظ سرعت خاص در مدت زمان مشخص. |
|
B7 |
کنترل Droop: کاربرد در مواقعی که دو موتور یک بار را حرکت میدهند. |
|
B8 |
مربوط به ذخیره انرژی. |
|
C1 |
تنظیمات شتابگیری مثبت و منفی سرعت (Ramp Accelerate/Decelerate). |
|
C2 |
تنظیمات Jerk (نرخ تغییر شتاب) برای حرکت نرمتر. |
|
C3 |
جبران لغزش (Slip Compensation). |
|
C4 |
جبران گشتاور (Torque Compensation). |
|
C5 |
تنظیمات حلقه کنترل سرعت. |
|
C6 |
فرکانس حامل (Carrier Frequency). |
|
D1 |
سرعتهای مبنا و تنظیم سرعتهای چندگانه. |
|
D6 |
Field Forcing. |
|
B4 |
تایمرهای تأخیر. |
|
E1 |
الگوی تعریف V/f (ولتاژ بر فرکانس). |
|
E2 |
پارامترهای مشخصات موتور (مانند جریان نامی، توان، تعداد قطب). |
|
E5 |
تنظیمات مختص موتورهای سنکرون. |
|
F1 |
تنظیمات انکودر. |
|
F3 |
تنظیمات کارت ورودی دیجیتال. |
|
F4 |
تنظیمات کارت خروجی آنالوگ. |
|
F5 |
تنظیمات کارت خروجی دیجیتال. |
|
F6 |
تنظیمات کارت ارتباطی. |
|
H1 |
تنظیم و تخصیص ورودیهای دیجیتال. |
|
H2 |
تنظیم و تخصیص خروجیهای دیجیتال (رلهای و ترانزیستوری). |
|
H3 |
تنظیم ورودیهای آنالوگ. |
|
H4 |
تنظیم خروجیهای آنالوگ. |
|
H5 |
تنظیمات پروتکل Modbus. |
|
L1 |
تنظیمات حفاظتی موتور (مانند اضافه بار). |
|
L2 |
تشخیص کاهش ولتاژ. |
|
L3 |
جلوگیری از قفل شدن شفت. |
|
L4 |
تشخیص سرعت. |
|
L5 |
تنظیمات مربوط به ریست خودکار خطاها (فالتها). |
|
L6 |
تشخیص گشتاور. |
|
L7 |
محدود کردن گشتاور. |
|
L8 |
تنظیمات حفاظتی درایو. |
|
n2 |
تشخیص سرعت فیدبک. |
|
n5 |
جبران اینرسی. |
|
n8 |
تیون کردن موتور سنکرون. |
|
n9 |
تنظیم تشخیص جریان. |
|
O1 |
انتخاب پارامترهای قابل نمایش بر روی صفحه نمایش درایو. |
|
O2 |
حالت و عملکرد کیپد. |
|
O3 |
انتقال دادههای درایو. |
|
n6 |
تیون موتور در حال کار. |
|
O4 |
تنظیمات نمایش وضعیت درایو. |
|
S1 |
تنظیمات ترمز، به ویژه ترمز تزریق جریان DC. |
|
S2 |
جبران لغزش آسانسور. |
|
S3 |
بهینهسازی استارت و استپ. |
|
S4 |
عملکرد درایو آسانسور در زمان قطع برق. |
|
S5 |
عملکرد طبقه کوتاه (Short Floor). |
|
S6 |
آشکارسازی خطا. |
|
T1 |
اتوتیون موتور آسنکرون (القایی). |
|
T2 |
اتوتیون موتور سنکرون. |
|
U1 |
نمایش وضعیتهای عملیاتی درایو (سرعت، جریان، ولتاژ و …). |
|
U2 |
وضعیت فعلی فالتها. |
|
U3 |
تاریخچه فالتهای رخ داده. |
|
U4 |
نمایش وضعیت نگهداری درایو. |
|
U6 |
نمایش وضعیت کنترلی. |
در بخشهای آتی، به توضیح و بررسی چندین پارامتر حیاتی از میان این گروهها خواهیم پرداخت که برای کنترل یک موتور القایی در حالت حلقه باز در یک سیستم آسانسور ساده، ضروری هستند. این تنظیمات، پایه و اساس یک راهاندازی موفق و کارآمد را تشکیل میدهند.
تنظیمات حیاتی پارامترها برای راهاندازی درایو Yaskawa L1000A
در این بخش، به تشریح برخی از مهمترین پارامترها در گروههای مختلف میپردازیم که برای راهاندازی یک درایو Yaskawa L1000A با موتور القایی در حالت کنترل حلقه باز (بدون انکودر) در آسانسور ضروری هستند.
تنظیمات گروه A1: تنظیمات اولیه و اساسی درایو
این گروه شامل تنظیمات بنیادی است که باید در ابتدای کار مورد توجه قرار گیرند.
-
A1-00 (انتخاب زبان):
-
0 = English
با تنظیم این پارامتر، میتوانید زبان نمایش پنل درایو را انتخاب کنید.
-
-
A1-01 (تعیین سطح دسترسی به پارامترها):
-
2 = Advanced
این پارامتر سطح دسترسی شما به منوهای پارامتردهی را مشخص میکند. برای دسترسی به تمامی پارامترها و تنظیمات پیشرفته، توصیه میشود مقدار آن را روی 2 (Advanced) قرار دهید.
-
-
A1-03 (بازگشت به تنظیمات کارخانه):
-
→ 2220 -
بازگشت به تنظیمات کارخانه
توصیه مهم: پیش از هرگونه تغییر در تنظیمات درایو و بازگرداندن آن به مقادیر پیشفرض کارخانه، اکیداً توصیه میشود تمامی تنظیمات قبلی درایو را در جایی مطمئن ثبت و ذخیره کنید. این کار میتواند در صورت بروز مشکل، به بازیابی تنظیمات اولیه کمک کند.
پارامتر A1-03 در حالت عادی مقدار صفر دارد. اگر این پارامتر را به 2220 تغییر دهید و سپس کلید Enter را فشار دهید، تمامی پارامترهای درایو به مقادیر پیشفرض کارخانه بازخواهند گشت و پس از آن، مقدار پارامتر A1-03 به طور خودکار به صفر باز میگردد. این ویژگی برای رفع مشکلات پیچیده و شروع مجدد پیکربندی مفید است.
-
چند تنظیم اولیه و مهم دیگر
این پارامترها نقش حیاتی در تعیین نحوه دریافت فرمانها و سرعتهای عملکردی درایو Yaskawa L1000A دارند.
-
B1-01 (انتخاب سرعت مرجع):
-
0: Digital operator
اگر مقدار این پارامتر 0 باشد، درایو برای تعیین سرعت، از مقادیر ذخیرهشده در حافظه داخلی (که در گروه پارامترهای D1 تنظیم میشوند) استفاده میکند. این حالت برای کنترل سرعت از طریق پنل درایو یا کنترلر خارجی که سیگنالهای دیجیتال ارسال میکند، مناسب است.
اگر مقدار پارامتر B1-01 را 1 قرار دهید، سرعت بر اساس ورودیهای آنالوگ درایو (A1 و A2) تنظیم میگردد. این قابلیت برای کنترل پیوسته سرعت در کاربردهایی که نیاز به تنظیم دقیق و متغیر سرعت دارند، مفید است.
-
-
B1-02 (منبع فرمانهای Up و Down):
درایو Yaskawa L1000A دارای دو ورودی S1 برای راستگرد (Up در آسانسور) و S2 برای چپگرد (Down در آسانسور) است.
اگر متغیر B1-02 را روی صفر قرار دهید، درایو برای تعیین جهت حرکت، از بیتهای داخل حافظه و مقادیر مشخص شده داخلی استفاده میکند.
به طور پیشفرض، B1-02 روی 1 تنظیم میشود و ورودی S1 را برای راستگرد (حرکت به بالا در آسانسور) و S2 را برای چپگرد (حرکت به پایین در آسانسور) به کار خواهد گرفت. این تنظیم استاندارد، سیمبندی و کنترل آسانسور را ساده میکند.
متغیرهای گروه C1: تنظیمات شتابگیری و کاهش شتاب
این پارامترها برای تنظیم نرمی حرکت آسانسور در شروع و توقف بسیار مهم هستند.
-
C1-01 (Acceleration Ramp1 – شیب شتابگیری):
-
مثال: 3 sec
پارامتر C1-01 مدت زمانی را نشان میدهد که درایو، سرعت موتور را از صفر به مقدار حداکثر خود میرساند. به عنوان مثال، اگر ورودی S3 بر روی درایو فعال گردد و مقدار پارامتر D1-19 بر روی 100% تنظیم شده باشد، در مدت زمانی که در پارامتر C1-01 تنظیم شده، سرعت از صفر به 100% (حداکثر سرعت) میرسد.
برای بالابرها و آسانسورها، مدت زمان C1-01 را معمولاً حدود 3 ثانیه تنظیم میکنند تا حرکت شروعی نرم و بدون تکان داشته باشد.
-
-
C1-02 (Deceleration Ramp1 – شیب کاهش شتاب):
-
مثال: 3 sec
پارامتر C1-02 نیز مدت زمانی است که سرعت موتور از 100% خود به صفر درصد کاهش مییابد. این پارامتر نیز تقریباً روی 3 ثانیه تنظیم میگردد تا توقف آسانسور نیز به نرمی و بدون ضربه انجام شود. تنظیم صحیح این پارامترها به بهبود کیفیت سواری و افزایش راحتی مسافران کمک میکند. برای درک عمیقتر اصول کنترل حرکت، میتوانید مقاله “بهینهسازی منحنی حرکت آسانسور با درایوهای نوین” در وبلاگ الکترومارکت را مطالعه نمایید.
-
پارامترهای گروه C2: تنظیمات Jerk و بهینهسازی منحنی حرکت
این پارامترها به کنترل نرمی انتقال بین شتابها و کاهش لرزشها در طول سفر آسانسور کمک میکنند.
با توجه به شکل 6 (که در این متن نمایانگر توضیحات فنی است)، منحنی حرکت آسانسور معمولاً شامل یک سرعت سریع (Fast) و یک سرعت آهسته (Slow) است. آسانسور ابتدا از سرعت صفر شروع به حرکت میکند و به سرعت حداکثر یا Fast میرسد. زمانی که مدار کنترلی دستور کاهش سرعت میدهد، سرعت از مقدار حداکثر خود به سرعت Slow کاهش مییابد و کمی با سرعت Slow ادامه خواهد داد و سپس با رسیدن به طبقه یا Level نهایی متوقف میشود. پارامترهای C2-01 تا C2-05 مربوط به تنظیمات Jerk در این منحنی حرکت هستند و شتاب تغییر سرعت را در گوشههای منحنی (نقاط تغییر شتاب) نشان میدهند. تنظیم دقیق این پارامترها به افزایش راحتی سرنشینان و کاهش سایش قطعات مکانیکی کمک میکند.
-
C2-01: بین 1 تا 3 ثانیه تنظیم گردد. (زمان تغییر شتاب در شروع حرکت)
-
C2-02: بین 1 تا 2 ثانیه تنظیم گردد. (زمان تغییر شتاب در انتقال از فاز شتابگیری به سرعت ثابت)
-
C2-03: بین 0.3 تا 1 ثانیه تنظیم گردد. (زمان تغییر شتاب در کاهش سرعت از Fast به Slow)
-
C2-04: بین 0.5 تا 1.5 ثانیه تنظیم گردد. (زمان تغییر شتاب در فاز Slow)
-
C2-05: بین 1 تا 2 ثانیه تنظیم گردد. (زمان تغییر شتاب در توقف نهایی)
پارامترهای گروه D1: تنظیمات سرعتهای عملکردی
این گروه از پارامترها به تعیین سرعتهای مختلفی که آسانسور میتواند با آنها حرکت کند، میپردازد.
-
اگر پارامتر D1-18 را بر روی صفر قرار دهید، درایو از سرعتهایی که در پارامترهای D1-01 تا D1-08 تنظیم شدهاند، استفاده میکند. این روش برای تعریف سرعتهای ثابت و از پیش تعیینشده مناسب است.
-
اما اگر D1-18 را بر روی 1 تنظیم کنید، میتوانید در پارامتر D1-19 مقدار سرعت Fast (حداکثر سرعت) را بر روی 100% و در پارامتر D1-26 مقدار سرعت Slow (سرعت آهسته) را بر روی 10% تنظیم نمایید. این پیکربندی برای کنترل دو سرعته (Fast/Slow) که در بسیاری از آسانسورها متداول است، کاربرد دارد.
-
زمانی که ورودی S3 بر روی درایو فعال گردد، درایو سرعت Fast یا 100% را انتخاب میکند. و زمانی که S3 قطع گردد و S6 فعال شود، درایو سرعت Slow یا 10% را انتخاب خواهد کرد.
توصیههای اولیه برای تنظیمات D1:
-
D1-18: بر روی
1تنظیم گردد. -
D1-19: بر روی
100%تنظیم گردد. -
D1-26: بر روی
10%تنظیم گردد.
پارامترهای گروه E1: ولتاژ و فرکانس نامی
این تنظیمات برای هماهنگی بین درایو و منبع تغذیه ضروری هستند.
-
E1-01 (ولتاژ نامی ورودی):
اگر ولتاژ ورودی سه فاز که به درایو داده میشود 400 ولت است، E1-01 را روی 400 تنظیم کنید.
-
E1-04 (حداکثر فرکانس خروجی):
حداکثر فرکانس خروجی درایو نیز معمولاً بر روی 50 هرتز تنظیم میشود. این تنظیمات باید مطابق با مشخصات شبکه برق منطقه و موتور آسانسور باشند.
پارامترهای گروه E2: مشخصات موتور
این گروه از پارامترها، اطلاعات حیاتی موتور را به درایو منتقل میکند تا درایو بتواند کنترل دقیق و بهینهای بر موتور داشته باشد. وارد کردن صحیح این مقادیر از اهمیت بالایی برخوردار است، به خصوص زمانی که پارامتر A1-02 بر روی 2، 3 یا 7 (حالتهای کنترل برداری) تنظیم شده باشد.
|
پارامتر |
شرح پارامتر |
واحد |
ملاحظات |
|
E2-01 |
جریان نامی موتور |
آمپر |
مطابق پلاک موتور |
|
E2-02 |
مقدار نامی لغزش موتور |
Hz |
مطابق پلاک موتور |
|
E2-03 |
جریان بیباری موتور |
آمپر |
مطابق پلاک موتور یا اندازهگیری |
|
E2-04 |
تعداد قطبهای موتور |
عدد |
مطابق پلاک موتور |
|
E2-05 |
مقاومت اهمی استاتور |
|
توسط اتوتیون محاسبه میشود |
|
E2-06 |
درصد اندوکتانس نشتی موتور |
% |
توسط اتوتیون محاسبه میشود |
|
E2-07 |
ضریب اشباع آهن موتور |
– |
توسط اتوتیون محاسبه میشود |
|
E2-11 |
توان نامی موتور |
Kw |
مطابق پلاک موتور |
نکته مهم: پارامترهای E2-05، E2-06 و E2-07 به طور خودکار توسط درایو و در طی فرایندی به نام اتوتیون محاسبه میشوند و نیازی به تغییر دستی توسط کاربر ندارند. این فرآیند، دقت کنترل درایو را به طرز چشمگیری افزایش میدهد. برای کسب اطلاعات بیشتر در مورد اهمیت پلاک موتور و پارامترهای آن، به وبلاگ الکترومارکت مراجعه کنید.
پارامترهای گروه H1: تخصیص ورودیهای دیجیتال
این گروه به شما اجازه میدهد تا عملکرد ورودیهای دیجیتال درایو را تعریف کنید.
-
ورودیهای S1 و S2 به طور پیشفرض برای فرمان حرکت راستگرد و چپگرد تعریف شدهاند (در صورتی که B1-02=1 باشد).
-
اما سایر ورودیهای S3 تا S8 را میتوانید در پارامترهای گروه H1 برنامهریزی کنید.
-
اگر H1-03 روی عدد
50تنظیم گردد، ترمینال S3 به عنوان ورودی فرمان سرعتFast(سریع) شناخته خواهد شد. -
اگر H1-06 بر روی
53تنظیم شود، ترمینال S6 برای حرکت دادن موتور با سرعتSlow(آهسته) به کار خواهد رفت.
پارامترهای گروه H2: تخصیص خروجیهای دیجیتال (رلهای)
این گروه برای تعریف عملکرد رلههای خروجی درایو به کار میرود. در کاربردهای آسانسوری، بر روی موتور از ترمزهای مکانیکی استفاده میشود. در حالت عادی، زمانی که بوبین ترمز بدون برق است، فنرهای موجود در ترمز مکانیکی، مانع از حرکت موتور میشوند. زمانی که درایو قصد فرمان دادن به موتور را دارد، ابتدا باید ترمز مکانیکی را باز کند و سپس موتور را به حرکت درآورد.
-
باز کردن ترمز به طور پیشفرض توسط ترمینالهای M1 و M2 صورت میگیرد. برای فعالسازی این عملکرد، مقدار پارامتر H2-01 را روی
50تنظیم کنید. -
معمولاً از یک کنتاکتور بین ترمینالهای خروجی درایو و ترمینالهای موتور استفاده میشود. قبل از اینکه درایو شروع به اعمال ولتاژ و فرکانس به موتور کند، باید این کنتاکتور وصل گردد و زمانی که آسانسور به انتهای مسیر رسید و نیاز بود که ارتباط موتور با درایو قطع گردد، این کنتاکتور باز میشود.
-
از رله خروجی M3-M4 برای کنترل کنتاکتور خروجی استفاده میشود. برای این منظور، باید پارامتر H2-02 را مساوی
51قرار دهید. این تنظیمات ایمنی و کنترل دقیق بر روی سیستم را تضمین میکنند.
گروه پارامترهای L1: حفاظت موتور
پارامترهای گروه L1 به منظور حفاظت از موتور در برابر شرایط غیرعادی به کار میروند.
-
L1-01 (حفاظت موتور در برابر اضافه بار):
-
اگر مقدار این پارامتر برابر
باشد، هیچ حفاظتی برای اضافه بار نخواهیم داشت. -
اگر مقدار این پارامتر را بر روی
1قرار دهیم، حفاظت اضافه بار برای موتورهای استاندارد فعال خواهد شد. این محافظت از آسیب دیدن موتور در اثر جریان بیش از حد جلوگیری میکند.
-
-
L1-02 (مدت زمان عملکرد اضافه بار):
-
مقدار این پارامتر بر حسب دقیقه است. حداقل زمان ممکن برای عملکرد اضافه بار، برابر 0.1 دقیقه (که معادل 6 ثانیه میشود) میباشد. تنظیم این زمان به دقت سیستم حفاظت اضافه بار کمک میکند.
-
گروه پارامتر L5: ریست خودکار فالتها
پارامترهای گروه L5 مربوط به ریست کردن خودکار خطاها (فالتها) درایو در زمان بروز مشکل است.
-
L5-01 (تعداد ریست شدن فالت):
با پارامتر L5-01 مشخص کنید که درایو، اجازه ریست کردن خودکار چند خطا را دارد. بعضی از خطاها را میتوان ریست نمود و مشکلی برای درایو به وجود نخواهد آمد، ولی تعداد ریست شدن خودکار نباید زیاد باشد. معمولاً در بالابرها، این پارامتر را بر روی 3 تنظیم میکنند. این تعداد دفعات ریست مجاز را قبل از توقف کامل سیستم کنترل میکند.
-
L5-02 (عملکرد رله خروجی فالت در زمان بروز فالت):
اگر مقدار این پارامتر را بر روی 1 تنظیم کنید، در زمان ریست شدن فالت، رله خروجی فالت فعال خواهد شد. اگر 0 باشد، فعال نخواهد شد. این تنظیم برای اطلاعرسانی به سیستم کنترل بالاتر در مورد وضعیت خطا و ریست شدن آن مفید است.
گروه پارامتر L8: حفاظت درایو
پارامترهای L8 نیز به منظور حفاظت از خود درایو به کار میروند.
-
L8-05 (خطای قطع شدن فاز ورودی درایو):
اگر مقدار این پارامتر را روی 0 قرار دهید و یکی از فازهای ورودی درایو قطع گردد، درایو خطا (فالت) نخواهد داد. ولی اگر روی 1 تنظیم گردد، درایو فالت خواهد داد. تنظیم این پارامتر روی 1 برای محافظت از درایو در برابر نامتعادلی ولتاژ ورودی توصیه میشود.
-
L8-07 (حفاظت موتور در برابر قطع فاز خروجی):
اگر یکی از فازهای خروجی درایو قطع گردد، در صورتی که مقدار پارامتر L8-07 را روی 1 تنظیم کنید، درایو فالت خواهد داد. این ویژگی از کارکرد موتور با فازهای ناقص و احتمال آسیب دیدن آن جلوگیری میکند.
گروه پارامترهای S1: تنظیمات ترمز (DC Injection Braking)
در کاربردهایی مانند بالابر، جرثقیل و آسانسور، علاوه بر ترمز مکانیکی که بر روی موتور قرار دارد، از ترمز با تزریق جریان DC نیز استفاده میشود. اگر به سیمپیچ استاتور یک موتور سه فاز، به جای ولتاژ AC، ولتاژ DC اعمال گردد، روتور قفل میگردد و تا زمانی که ولتاژ DC قطع نشود، موتور در همان حالت قفل شده باقی خواهد ماند. این نوع ترمز برای توقف دقیق و جلوگیری از حرکت ناخواسته کابین بسیار مفید است.
-
S1-02 (مقدار جریان DC تزریقی در لحظه استارت %):
-
S1-03 (مقدار جریان DC تزریقی در لحظه توقف %):
مقدار دو پارامتر S1-02 و S1-03 را میتوانید بین 0% تا 100% تنظیم کنید. مقدار 50% به عنوان پیشفرض، معمولاً مقدار مناسبی است. این تنظیم، قدرت ترمزگیری الکتریکی را در زمان شروع و توقف تعیین میکند.
-
S1-04 (مدت زمان تزریق جریان DC در زمان استارت):
-
S1-05 (مدت زمان تزریق جریان DC در زمان توقف):
مقدار پارامترهای S1-04 و S1-05 را میتوانید بین 0.1 ثانیه تا 1 ثانیه (و حتی تا 10 ثانیه) بر حسب نوع کاربرد، تغییر دهید. البته افزایش بیش از حد این زمان ممکن است مطلوب نباشد. تنظیم این مدت زمان به پایداری توقف و کاهش لرزش کمک میکند.
اتوتیون کردن موتور و درایو Yaskawa L1000A
در سیستمهایی که از درایوهای Yaskawa L1000A در حالت Vector Control (کنترل برداری) استفاده میشود، درایو باید درک دقیقی از مشخصات الکتریکی موتور (مانند مقاومت اهمی و اندوکتانسها) داشته باشد. این اطلاعات برای کنترل دقیق گشتاور و سرعت موتور ضروری هستند.
با استفاده از عملکرد اتوتیون (Auto-Tuning)، درایو میتواند به طور خودکار پارامترهای موتور را محاسبه و شناسایی کند. این فرآیند، دقت کنترل و بهینگی عملکرد درایو را به طرز چشمگیری افزایش میدهد.
پارامترهای گروه T1 به منظور اتوتیون موتورهای القایی (آسنکرون) استفاده میشوند.
-
T1-01 (انتخاب نوع اتوتیون شدن موتور):
-
اگر موتور امکان حرکت آزادانه داشته باشد (بدون بار مکانیکی)، میتوانید مقدار T1-01 را بر روی
تنظیم نمایید. -
اما در بسیاری از کاربردها از جمله بالابر و آسانسور، معمولاً موتور همواره درگیر است و امکان حرکت آزادانه ندارد. در این حالت، پارامتر T1-01 را میتوانید بر روی مقادیر
1, 2, 4تنظیم کنید. با انتخاب این مقادیر، شما به درایو اجازه میدهید که بدون حرکت دادن موتور، و تنها با اعمال ولتاژ و فرکانس به سیمپیچ موتور در حالت ساکن، پارامترهای موتور را محاسبه کند.
-
مراحل شروع اتوتیون:
به منظور شروع اتوتیون، مراحل زیر را به دقت دنبال کنید:
-
ابتدا ترمینالهای Hc، H1 و H2 را به یکدیگر متصل کنید.
-
کنتاکتور خروجی که بین درایو و موتور قرار دارد را به صورت دستی فشار دهید تا ارتباط بین موتور و درایو برقرار گردد. آنتاکتور را تا پایان اتوتیون در این حالت نگه دارید.
-
سپس پارامترهای مربوط به اتوتیون را در درایو وارد کنید. ابتدا پارامتر T1-01 را برابر
1قرار دهید. -
در ادامه، پارامترهای T1-02 تا T1-10 را (مطابق با پلاک موتور) در درایو وارد کنید:
|
پارامتر |
شرح پارامتر |
واحد |
|
T1-02 |
توان نامی موتور |
Kw |
|
T1-03 |
ولتاژ نامی موتور |
ولت |
|
T1-04 |
جریان نامی موتور |
آمپر |
|
T1-05 |
فرکانس نامی موتور |
هرتز |
|
T1-06 |
تعداد قطبهای موتور |
عدد |
|
T1-07 |
سرعت نامی موتور |
RPM |
|
T1-08 |
تعداد پالسهای انکودر |
پالس/دور |
|
T1-09 |
جریان بیباری موتور |
آمپر |
|
T1-10 |
لغزش نامی موتور |
Hz |
نحوه اجرای اتوتیون:
-
پس از وارد کردن پارامترهای بالا، اتوتیون آغاز میگردد. همانطور که گفته شد، کنتاکتور خروجی درایو را با دست فشار دهید و تا پایان اتوتیون، کنتاکتور را در این حالت نگه دارید.
-
گام اول: یک بار T1-01 را بر روی
1قرار دهید و اتوتیون را اجرا کنید. -
گام دوم: سپس مقدار T1-01 را بر روی
2قرار دهید و دوباره اتوتیون را اجرا کنید. -
گام سوم: در انتها، مقدار T1-01 را بر روی 4 قرار دهید و مجدداً اتوتیون را انجام دهید.
این فرآیند چند مرحلهای، دقت اتوتیون را به حداکثر میرساند و درایو را به بهترین شکل برای کنترل موتور تنظیم میکند.
مانیتورینگ و عیبیابی: گروه پارامترهای U1 و U3
پس از راهاندازی و تنظیم درایو، مانیتورینگ عملکرد آن و دسترسی به اطلاعات خطاها برای عیبیابی ضروری است.
گروه پارامترهای U1: نمایش وضعیت درایو
مقادیر جریان، ولتاژ، سرعت و توان درایو را میتوانید در پارامترهای گروه U1 مشاهده کنید. این پارامترها اطلاعات لحظهای از عملکرد درایو ارائه میدهند و برای نظارت بر وضعیت سیستم بسیار مفیدند.
|
پارامتر |
شرح پارامتر |
|
U1-01 |
سرعت مرجع درایو |
|
U1-02 |
سرعت خروجی درایو |
|
U1-03 |
جریان خروجی درایو |
|
U1-04 |
روش کنترلی |
|
U1-05 |
سرعت موتور |
|
U1-06 |
مرجع ولتاژ خروجی |
|
U1-07 |
ولتاژ باس DC |
|
U1-08 |
توان خروجی درایو |
|
U1-09 |
مرجع گشتاور |
|
U1-10 |
وضعیت ترمینالهای ورودی |
|
U1-11 |
وضعیت ترمینالهای خروجی |
|
U1-12 |
وضعیت درایو |
|
U1-13 |
ولتاژ آنالوگ ورودی 1 |
|
U1-14 |
ولتاژ آنالوگ ورودی 2 |
گروه پارامترهای U3: تاریخچه فالتها
خطاهای رخ داده برای درایو را میتوانید در پارامترهای U3-01 تا U3-20 مشاهده کنید. این تاریخچه به شما کمک میکند تا مشکلات گذشته سیستم را ردیابی و علت بروز آنها را شناسایی کنید.
|
پارامتر |
شرح پارامتر |
|
U3-01 |
آخرین فالت رخ داده برای درایو |
|
U3-02 |
فالت یکی مانده به آخر |
|
U3-03 |
فالت دو تا مانده به آخر |
|
U3-04 |
فالت سه تا مانده به آخر |
|
U3-05 |
فالت چهار تا مانده به آخر |
|
U3-06 |
فالت پنج تا مانده به آخر |
|
U3-07 |
فالت شش تا مانده به آخر |
|
U3-08 |
فالت هفت تا مانده به آخر |
|
U3-09 |
فالت هشت تا مانده به آخر |
جدولهای عیبیابی درایو Yaskawa L1000A
برای عیبیابی کامل، لیست کدهای خطا (Faults)، هشدارها (Alarms)، خطاهای عملیاتی (Operation Errors)، خطاهای تنظیم خودکار (Auto-Tuning Errors) و خطاهای کپی (Copy Errors) در جداول زیر آورده شده است. این جداول شامل کد، نام، توضیح، علل احتمالی و راهحلهای عیبیابی هستند. برای موارد پیچیده، با کارشناسان الکترومارکت تماس بگیرید.
Faults (کدهای خطا)
|
کد |
نام |
توضیح |
علل احتمالی |
راهحلهای عیبیابی |
|---|---|---|---|---|
|
boL |
Braking Transistor Overload |
ترانزیستور ترمز بیش از حد بارگذاری شده است. |
مقاومت ترمز اشتباه نصب شده است. |
بررسی کنید که رتبهبندی مقاومت ترمز با درایو و کاربرد مطابقت دارد. در صورت نیاز از ترانزیستور ترمز خارجی استفاده کنید. |
|
bUS |
Option Communication Error |
ارتباط پس از برقراری اولیه قطع شده است (تنها زمانی که فرمان سرعت به کارت گزینه اختصاص داده شده). |
سیمکشی معیوب، مدار کوتاه، نویز، کارت گزینه آسیبدیده. |
سیمکشی را بررسی و اصلاح کنید، نویز را کاهش دهید، کارت گزینه را تعویض کنید. |
|
CE |
MEMOBUS/Modbus Communication Error |
دادههای ارتباطی برای زمان تنظیمشده در H5-09 دریافت نشده است. |
سیمکشی معیوب، نویز. |
سیمکشی را بررسی و اصلاح کنید، نویز را کاهش دهید. |
|
CF |
Control Fault |
حد گشتاور برای بیش از 3 ثانیه در حین توقف در کنترل OLV رسیده است. |
پارامترهای موتور اشتباه تنظیم شده، حد گشتاور پایین، بار اینرسی بزرگ. |
پارامترهای موتور را بررسی کنید، حد گشتاور را تنظیم کنید، زمان کاهش سرعت را تنظیم کنید. |
|
CoF |
Current Offset Fault |
سنسور جریان آسیبدیده یا جریان القایی باقیمانده در موتور وجود دارد. |
جریان القایی باقیمانده در موتور، سختافزار آسیبدیده. |
توالی راهاندازی موتور را ایجاد کنید، جستجوی سرعت را فعال کنید، درایو را تعویض کنید. |
|
CPF00, CPF01 |
Control Circuit Error |
خطای خودتشخیصی در مدار کنترل. |
خطای مدار کنترل، اتصال اپراتور آسیبدیده. |
برق را قطع و وصل کنید، مدار کنترل یا درایو را تعویض کنید. |
|
CPF02 |
A/D Conversion Error |
خطای تبدیل A/D یا مدار کنترل رخ داده است. |
مدار کنترل آسیبدیده. |
برق را قطع و وصل کنید، مدار کنترل را تعویض کنید. |
|
CPF03 |
Control Board Connection Error |
خطای اتصال بین برد کنترل و درایو. |
خطای اتصال، تداخل نویز. |
اتصال را بررسی کنید، نویز را کاهش دهید، مدار کنترل را تعویض کنید. |
|
CPF06 |
EEPROM Memory Data Error |
خطا در دادههای ذخیرهشده در EEPROM. |
خطای مدار EEPROM، قطع برق در حین ذخیره پارامترها. |
اتصال را بررسی کنید، درایو را مجدداً مقداردهی اولیه کنید. |
|
CPF07, CPF08 |
Terminal Board Connection Error |
اتصال معیوب بین برد ترمینال و مدار کنترل. |
اتصال معیوب. |
اتصال را بررسی کنید، مدار کنترل را تعویض کنید. |
|
CPF11 to CPF14, CPF16 to CPF21, CPF26 to CPF34 |
Control Circuit Error |
سختافزار آسیبدیده است. |
سختافزار آسیبدیده. |
برق را قطع و وصل کنید، مدار کنترل را تعویض کنید. |
|
CPF22 |
Hybrid IC Failure |
شکست IC هیبریدی در برد قدرت. |
IC هیبریدی آسیبدیده. |
برق را قطع و وصل کنید، مدار قدرت را تعویض کنید. |
|
CPF23 |
Control Board Connection Error |
خطای اتصال بین برد کنترل و درایو. |
سختافزار آسیبدیده. |
اتصال را بررسی کنید، مدار کنترل را تعویض کنید. |
|
CPF24 |
Drive Unit Signal Fault |
ظرفیت درایو به درستی شناسایی نشده است. |
سختافزار آسیبدیده. |
مدار کنترل را تعویض کنید. |
|
CPF25 |
Terminal Board not Connected |
برد ترمینال به درستی متصل نیست. |
برد ترمینال متصل نیست. |
برد ترمینال را مجدداً وصل کنید. |
|
CPF35 |
A/D Conversion Error |
خطای تبدیل A/D رخ داده است. |
تبدیل A/D آسیبدیده. |
برق را قطع و وصل کنید، مدار کنترل را تعویض کنید. |
|
dEv |
Speed Deviation (for Control Mode with Encoder) |
انحراف بین مرجع سرعت و فیدبک بیش از F1-10 برای زمان F1-11 است. |
بار سنگین، شتاب/کاهش سرعت کوتاه، پارامترها اشتباه، ترمز موتور اعمال نشده. |
بار را کاهش دهید، زمان شتاب را افزایش دهید، پارامترها را بررسی کنید، ترمز را بررسی کنید. |
|
dv1 |
Encoder Z Pulse Fault |
موتور یک دور کامل چرخیده بدون تشخیص پالس Z. |
انکودر متصل نیست یا آسیبدیده. |
انکودر را بررسی و تعویض کنید. |
|
dv2 |
Z Pulse Noise Fault Detection |
پالس Z بیش از 5 درجه خارج از فاز برای تعداد F1-17. |
تداخل نویز، سیمکشی اشتباه. |
سیمکشی را بررسی کنید، انکودر را تعویض کنید. |
|
dv3 |
Inversion Detection |
مرجع گشتاور و شتاب در جهت مخالف، تفاوت سرعت بیش از 30% برای F1-18. |
افست انکودر اشتباه، نیروی خارجی، نویز، جهت چرخش اشتباه. |
افست انکودر را تنظیم کنید، سیمکشی را بررسی کنید. |
|
dv4 |
Inversion Prevention Detection |
پالسها نشاندهنده چرخش موتور در جهت مخالف مرجع سرعت است. |
افست انکودر اشتباه، نویز، انکودر آسیبدیده. |
افست را تنظیم کنید، سیمکشی را بررسی کنید. |
|
dv6 |
Overacceleration Detection |
شتاب آسانسور بیش از سطح تشخیص S6-10. |
افست انکودر اشتباه، نویز، سیمکشی اشتباه، دادههای موتور اشتباه، شتاب سریع. |
افست را تنظیم کنید، سیمکشی را بررسی کنید، پارامترهای E5 را چک کنید، شتاب را تنظیم کنید. |
|
dv7 |
Rotor Polarity Detection Timeover |
قادر به تشخیص قطبهای مغناطیسی در زمان تعیینشده نیست. |
ولتاژ باتری پایین، کابل خروجی قطع، سیمپیچ موتور آسیبدیده. |
باتری را شارژ کنید، سیمکشی را بررسی کنید، موتور را تعویض کنید. |
|
dv8 |
PM Rotor Position Estimation Error |
نتیجه جستجوی قطب اولیه مقدار نامعتبری است. |
ویژگیهای موتور تغییر کرده، پارامترها اشتباه تنظیم شده، ترمز در حین جستجو رها شده. |
خطا را ریست کنید، تنظیم را تکرار کنید، Auto-Tuning انجام دهید. |
|
EF0 |
Option Card External Fault |
وضعیت خطای خارجی وجود دارد. |
خطای خارجی از PLC، مشکل برنامه PLC. |
علت خطا را برطرف کنید، برنامه PLC را بررسی کنید. |
|
EF3 to EF8 |
External Fault (input terminal S3 to S8) |
خطای خارجی در ترمینال ورودی چندمنظوره. |
دستگاه خارجی هشدار را تریپ کرده، سیمکشی اشتباه، تنظیم ورودی اشتباه. |
علت خطا را برطرف کنید، سیمکشی را بررسی کنید، تنظیمات ترمینال را تغییر دهید. |
|
Err |
EEPROM Write Error |
داده نمیتواند به EEPROM نوشته شود. |
نویز داده را خراب کرده، مشکل سختافزاری. |
دکمه ریست را فشار دهید، پارامتر را اصلاح کنید، برق را قطع و وصل کنید. |
|
FrL |
Speed Reference Missing |
d1-18=3، تشخیص سرعت سطحی اختصاص داده نشده و هیچ سرعتی انتخاب نشده. |
d1-18=1، H1-=53 نیست و هیچ سرعتی در شروع انتخاب نشده. |
روش انتخاب سرعت را بررسی کنید، کنترلر آسانسور را چک کنید. |
|
GF |
Ground Fault |
جریان کوتاه به زمین بیش از 50% جریان نامی خروجی. |
عایق موتور آسیبدیده، کابل موتور کوتاه، جریان نشتی بالا. |
مقاومت عایق را بررسی کنید، کابل را تعویض کنید، فرکانس کریر را کاهش دهید. |
|
LF |
Output Phase Loss |
از دست رفتن فاز در سمت خروجی درایو. |
کابل خروجی قطع، سیمپیچ موتور آسیبدیده، ترمینال خروجی شل. |
سیمکشی را بررسی کنید، موتور را تعویض کنید، ظرفیتها را چک کنید. |
|
LF2 |
Output Current Imbalance |
یکی یا بیشتر از فازهای جریان خروجی از دست رفته است. |
فاز خروجی از دست رفته، سیمهای خروجی شل، مدار خروجی آسیبدیده. |
سیمکشی خروجی را بررسی کنید، مقاومت موتور را اندازهگیری کنید. |
|
oC |
Overcurrent |
جریان خروجی بیش از سطح بیشجریان مشخصشده. |
موتور آسیبدیده، کابل کوتاه، بار سنگین، شتاب سریع. |
عایق را بررسی کنید، کابل را چک کنید، بار را کاهش دهید، V/f را تنظیم کنید. |
|
oFA00 |
Option Card Connection Error at CN5-A |
کارت گزینه در پورت CN5-A ناسازگار است. |
کارت گزینه ناسازگار، کارت PG در CN5-A متصل است. |
کارت را بررسی کنید، کارت PG را در CN5-B یا C وصل کنید. |
|
oFA01 |
Option Card Fault at CN5-A |
اتصال کارت گزینه به پورت CN5-A معیوب است. |
گزینه به درستی متصل نیست. |
برق را قطع کنید، کارت را مجدداً وصل کنید. |
|
oFA05, oFA06, oFA10, oFA11, oFA12 to oFA17, oFA30 to oFA43 |
Option Card Error at CN5-A |
کارت گزینه یا سختافزار آسیبدیده است. |
کارت آسیبدیده. |
برق را قطع و وصل کنید، مدار کنترل را تعویض کنید. |
|
oFb00 |
Option Card Connection Error (CN5-B) |
کارت گزینه در پورت CN5-B ناسازگار است. |
کارت گزینه ناسازگار. |
کارت را بررسی کنید. |
|
oFb01 |
Option Card Fault (CN5-B) |
اتصال کارت گزینه به پورت CN5-B معیوب است. |
گزینه به درستی متصل نیست. |
کارت را مجدداً وصل کنید. |
|
oFb02, oFb03, oFb11, oFb12 to oFb17 |
Option Card Fault (CN5-B) |
کارت گزینه آسیبدیده است. |
کارت آسیبدیده. |
کارت را تعویض کنید. |
|
oFC00 |
Option Card Connection Error (CN5-C) |
کارت گزینه در پورت CN5-C ناسازگار است. |
کارت گزینه ناسازگار. |
کارت را بررسی کنید. |
|
oFC01 |
Option Card Fault (CN5-C) |
اتصال کارت گزینه به پورت CN5-C معیوب است. |
گزینه به درستی متصل نیست. |
کارت را مجدداً وصل کنید. |
|
oFC02, oFC03, oFC11, oFC12 to oFC17 |
Option Card Fault (CN5-C) |
کارت گزینه آسیبدیده است. |
کارت آسیبدیده. |
کارت را تعویض کنید. |
|
oFC50 |
Encoder Option AD Conversion Error |
خطای تبدیل AD در گزینه انکودر. |
گزینه آسیبدیده. |
گزینه را تعویض کنید. |
|
oFC51 |
Encoder Option Analog Circuit Error |
خطای مدار آنالوگ گزینه انکودر. |
گزینه آسیبدیده. |
گزینه را تعویض کنید. |
|
oFC52 |
Encoder Communication Timeout |
تایماوت ارتباط انکودر. |
گزینه آسیبدیده. |
گزینه را تعویض کنید. |
|
oFC53 |
Encoder Communication Data Error |
خطای داده ارتباط انکودر. |
گزینه آسیبدیده. |
گزینه را تعویض کنید. |
|
oFC54 |
Encoder Error |
خطای انکودر. |
گزینه آسیبدیده. |
گزینه را تعویض کنید. |
|
oH |
Heatsink Overheat |
گرمای بیش از حد هیتسینک. |
محیط گرم، فن خنککننده آسیبدیده، جریان هوا مسدود، بار سنگین. |
محیط را خنک کنید، فن را بررسی و تعویض کنید، جریان هوا را بهبود بخشید، بار را کاهش دهید. |
|
oH1 |
Heatsink Overheat |
گرمای بیش از حد هیتسینک. |
محیط گرم، فن خنککننده آسیبدیده، جریان هوا مسدود، بار سنگین. |
محیط را خنک کنید، فن را بررسی و تعویض کنید، جریان هوا را بهبود بخشید، بار را کاهش دهید. |
|
oH3 |
Motor Overheat Alarm (PTC thermistor input) |
هشدار گرمای بیش از حد موتور (ورودی ترمیستور PTC). |
بار سنگین، فن موتور آسیبدیده، محیط گرم. |
بار را کاهش دهید، فن موتور را بررسی کنید، محیط را خنک کنید. |
|
oH4 |
Motor Overheat Fault (PTC thermistor input) |
خطای گرمای بیش از حد موتور (ورودی ترمیستور PTC). |
بار سنگین، فن موتور آسیبدیده، محیط گرم. |
بار را کاهش دهید، فن موتور را بررسی کنید، محیط را خنک کنید. |
|
oL1 |
Motor Overload |
بیشبار موتور. |
بار سنگین، زمان شتاب/کاهش کوتاه، ولتاژ خروجی بالا، جریان نامی موتور اشتباه، فرکانس پایه اشتباه، چندین موتور، ناهماهنگی حفاظت حرارتی، نوسان جریان خروجی. |
بار را کاهش دهید، زمان شتاب/کاهش را افزایش دهید، V/f را تنظیم کنید، جریان موتور را چک کنید، فرکانس پایه را تنظیم کنید، حفاظت را غیرفعال کنید، رله حرارتی نصب کنید، منبع تغذیه را چک کنید. |
|
oL2 |
Drive Overload |
بیشبار درایو. |
بار سنگین، زمان شتاب/کاهش کوتاه، ولتاژ خروجی بالا، ظرفیت درایو کوچک، بیشبار در سرعت پایین، جبران گشتاور بیش از حد، نوسان جریان خروجی. |
بار را کاهش دهید، زمان شتاب/کاهش را افزایش دهید، V/f را تنظیم کنید، درایو بزرگتر استفاده کنید، بار در سرعت پایین را کاهش دهید، فرکانس کریر را کاهش دهید، جبران گشتاور را تنظیم کنید، منبع تغذیه را چک کنید. |
|
oL3 |
Overtorque Detection 1 |
تشخیص بیشگشتاور 1. |
تنظیمات پارامتر نامناسب برای بار. |
تنظیمات L6-02 و L6-03 را بررسی و تنظیم کنید. |
|
oL4 |
Overtorque Detection 2 |
تشخیص بیشگشتاور 2. |
تنظیمات پارامتر نامناسب برای بار. |
تنظیمات L6-05 و L6-06 را بررسی و تنظیم کنید. |
|
oPr |
Operator Connection Fault |
خطای اتصال اپراتور. |
اتصال اپراتور خارجی معیوب. |
اتصال را بررسی کنید، کابل را تعویض کنید، برق را قطع و وصل کنید. |
|
oS |
Overspeed |
بیشسرعت. |
تنظیمات پارامتر نامناسب، overshoot. |
C5-01 را کاهش دهید، C5-02 را افزایش دهید، جبران اینرسی را فعال کنید، F1-08 و F1-09 را چک کنید. |
|
ov |
DC Bus Overvoltage |
بیشولتاژ باس DC. |
ولتاژ ورودی بالا، زمان کاهش سرعت کوتاه، انرژی بازتولیدی. |
ولتاژ ورودی را چک کنید، زمان کاهش سرعت را افزایش دهید، مقاومت ترمز را چک کنید. |
|
PF |
Input Phase Loss |
از دست رفتن فاز ورودی. |
یک فاز از دست رفته، اتصال شل، فیوز سوخته. |
سیمکشی ورودی را بررسی کنید، اتصالات را سفت کنید، فیوزها را تعویض کنید، L8-05 را تنظیم کنید. |
|
PF5 |
Rescue Operation Power Supply Deterioration Error |
خطای افت منبع تغذیه عملیات نجات. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
PGo |
Encoder Disconnected (for Control Mode with Encoder) |
انکودر قطع شده است. |
انکودر قطع شده، مشکل سیمکشی، انکودر آسیبدیده. |
سیمکشی انکودر را بررسی کنید، اتصال را چک کنید، انکودر را تعویض کنید، F1-02 را تنظیم کنید. |
|
PGoH |
Encoder Disconnected (when using encoder) |
انکودر قطع شده است. |
انکودر قطع شده، مشکل سیمکشی، انکودر آسیبدیده. |
سیمکشی انکودر را بررسی کنید، اتصال را چک کنید، انکودر را تعویض کنید، F1-02 را تنظیم کنید. |
|
rF |
Braking Resistor Fault |
خطای مقاومت ترمز. |
استفاده بیش از حد از ترمز، ظرفیت مقاومت ناکافی. |
فرکانس ترمز را کاهش دهید، ظرفیت مقاومت را افزایش دهید. |
|
rr |
Dynamic Braking Transistor Fault |
خطای ترانزیستور ترمز دینامیک. |
گرم شدن بیش از حد ترانزیستور ترمز، استفاده بدون مقاومت. |
مقاومت ترمز را وصل کنید، حفاظت را غیرفعال کنید اگر لازم نیست (L8-55 = 0)، گرم شدن را چک کنید. |
|
SC |
IGBT Short Circuit |
مدار کوتاه IGBT. |
مدار کوتاه در موتور یا سیمکشی، آسیب IGBT، بار بیش از حد. |
سیمکشی را چک کنید، درایو را تعویض کنید اگر IGBT آسیب دیده، بار را کاهش دهید. |
|
SCF |
Safety Circuit Fault |
خطای مدار ایمنی. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
SE1 |
Motor Contactor Response Error |
خطای پاسخ کنتاکتور موتور. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
SE2 |
Starting Current Error |
خطای جریان شروع. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
SE3 |
Output Current Error |
خطای جریان خروجی. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
SE4 |
Brake Response Error |
خطای پاسخ ترمز. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
SvE |
Position Lock Error |
خطای قفل موقعیت. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
STo |
Motor Pull Out or Step Out Detection |
تشخیص کشیده شدن یا گام خارج شدن موتور. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
UL3 |
Undertorque Detection 1 |
تشخیص کمگشتاور 1. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
UL4 |
Undertorque Detection 2 |
تشخیص کمگشتاور 2. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
Uv1 |
DC Bus Undervoltage |
کمولتاژ باس DC. |
از دست رفتن قدرت ورودی، ولتاژ ورودی پایین، قطع لحظهای برق. |
منبع تغذیه را چک کنید، ولتاژ را پایدار کنید، L2-05 را چک کنید. |
|
Uv2 |
Control Power Undervoltage |
کمولتاژ قدرت کنترل. |
مشکل منبع تغذیه مدار کنترل. |
سیمکشی مدار کنترل را چک کنید، منبع تغذیه را بررسی کنید. |
|
Uv3 |
Soft Charge Circuit Fault |
خطای مدار شارژ نرم. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
|
voF |
Output Voltage Detection Error |
خطای تشخیص ولتاژ خروجی. |
با کارشناسان الکترومارکت تماس بگیرید. |
با کارشناسان الکترومارکت تماس بگیرید. |
Alarms (هشدارها)الکترومارکت به عنوان یک منبع معتبر و تخصصی در حوزه تأمین تجهیزات اتوماسیون صنعتی، آماده ارائه خدمات جامع به شما عزیزان است. ما به شما کمک میکنیم تا بهترین درایو Yaskawa L1000A را برای نیازهای خاص پروژه خود انتخاب کنید. خدمات ما شامل:
- مشاوره تخصصی رایگان: تیم مجرب مهندسان الکترومارکت آماده ارائه مشاورههای فنی دقیق برای انتخاب دقیقترین و مناسبترین درایو بر اساس مشخصات آسانسور شما هستند.
- تأمین و فروش: الکترومارکت تضمین میکند که شما درایو Yaskawa L1000Aاصلی و با کیفیت را با بهترین قیمت و در کوتاهترین زمان ممکن دریافت خواهید کرد.
- پشتیبانی فنی و خدمات پس از فروش: حتی پس از خرید، میتوانید روی پشتیبانی فنی و خدمات پس از فروش ما برای نصب، راهاندازی، عیبیابی و رفع مشکلات احتمالی حساب کنید.
- منابع آموزشی و مقالات تخصصی: برای گسترش دانش خود در زمینه درایوها، PLC ها، HMI ها و دیگر تجهیزات صنعتی، میتوانید به طور منظم به وبلاگ الکترومارکت سر بزنید و از مقالات آموزشی ما بهرهمند شوید.
 تماس با ما – الکترومارکت
تماس با ما – الکترومارکت الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست.
الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست. دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷
دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷  تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴
تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴ وبسایت:
وبسایت:  در دسترس برای مشاوره رایگان
در دسترس برای مشاوره رایگان