بررسی های عملی برای انتخاب موتور استاندارد برای کار با اینورتر های فرکانسی

انتخاب موتور استاندارد برای اینورتر چگونه و چرا؟
انتخاب موتور برای درایو فرکانس متغیر (VFD)
بررسی های مهم برای مد نظر قرار دادن انتخاب موتور برای سیستم درایو سرعت قابل تنظیم AC:
1- تعیین الزامات محفظه موتور
2- تعیین الزامات سرعت و گشتاور موتور:
a. طیف سرعت عملیاتی
b. گسیختگی گشتاور
3- تعیین الزامات شتاب و کاهش سرعت ( زمان و بار)
4- اضافه جریان (آورلود)
5- تعیین نوع ماموریت:
a. فرایند پیوسته
b. سیکلهای ماموریت
6- ملاحظات دیگر :
a. بای پس ( شروع از خط عرضی)
b. فرکانس عملیاتی
c. کارایی
1. تعیین الزامات محفظه یا بدنه موتور
Determine motor enclosure requirements
اغلب اوقات محیط، انتخاب نوع محفظه موتور را تعیین می کند.
به هر حال، در مورد همه موتورهای تهویه ، فراهم آوردن یک فضای مناسب تهویه باید با دقت لازم صورت گیرد.
توصیه میشود در ادامه مطالعه شود: مقایسه بدنه ۷ نوع از رایج ترین الکتروموتور های استفاده شده در صنعت
بعضی از نمونه های محفظه ها که بطور معمول برای مکانهای بی خطر موجود هستند ، به قرار زیر است:




- موتورهای باز ضد ریزش آب و خود روزندار (ODP) برای محیطهایی که حاوی مقدار قابل توجهی از مواد هوابرد هستند و نمی توانند در موتور یا مواد شیمیایی که به قسمتهای داخلی موتور و عایق آن آسیب می زنند انباشته شوند، مناسب نیستند.
- موتورهای خنک کننده ای که دارای فن کاملا بسته هستند (TEFC)، با تهویه خارجی برای بیشتر محیطها مناسب می باشند.
- موتورهای بدون تهویه کاملا بسته (TENV) از فشار هوا برای تهویه استفاده نمی کنند، اما به شعاع و همبرداری هوای اطراف متکی هستند. در زمان موجود بودن ، آنها برای بیشتر محیطها مناسب هستند، بجز در جاهاییکه میزان قابل توجهی از مواد هوابرد موجود باشند و بتوانند بر موتور و عایق آن انباشته شوند.
- موتورهای تهویه دمنده کاملا بسته مشابه TEFC هستند، بجز در مورد یک موتور جداگانه که فن خنک کننده را راه اندازی می کند و می تواند در محیطهای مشابهی مورد استفاده قرار گیرد.
- موتورهای دمنده- تهویه باز، مشابه ODP هستند، بجز در مورد یک موتور جداگانه که فن خنک کننده را راه اندازی می کند و می تواند در محیطهای مشابهی مورد استفاده قرار گیرد.
مکانهای خطرناک
هشدار// موتورهای راه اندازی شده با کنترل فرکانس قابل تنظیم (اینورتر)،
نباید در هر قسمت 1 از مکانهای خطرناک (طبقه بندی شده) مورد استفاده قرار گیرند، مگر اینکه در پلاک موتور بطور قابل قبولی برای عملیات فرکانس قابل تنظیم در زمان استفاده در بخش 1 از مکانهای خطرناک ( طبقه بندی شده) شناسایی شود.
برای موتورهایی که در هر بخش 2 از مکانهای خطرناک (طبقه بندی شده) مورد استفاده قرار می گیرند، باید با سازنده موتور مشورت شود.
عدم پذیرش این هشدار می تواند منجر به نصب و راه اندازی غیر ایمنی شود که می تواند موجب آسیب به اموال یا صدمات جدی یا مرگ پرسنل ، یا هر دوی اینها شود.
2. تعیین گشتاور موتور و الزامات سرعت
طیف سرعت عملیاتی
رسیدن به طیف سرعت مورد نظر ممکن است بسته به نوع کاربرد دشوار باشد. بطور کل، بسته به اندازه موتور و نوع بار، طیف وسیعی ممکن است به یک موتور خاص نیاز داشته باشند.
اجرا در سرعت بسیار پایین، مستلزم عملکرد موتور در فرکانس بسیار پایینی است ( تقریبا پایین 6 HZ)، یا سرعتهای بسیار بالا مستلزم راه اندازی موتور در فرکانسهای بسیار بالا ( بالای 9 HZ) ممکن است به یک موتور خاص نیاز داشته باشند.
سرعت سنکرون موتور مستقیما بر اساس فرکانس خروجی کنترل موتور متفاوت است.
بنابراین، فرکانس مورد نیاز برای رسیدن به سرعت مورد نظر می تواند با تقسیم سرعت مورد نظر توسط سرعت مجاز موتور تقریب شود و سپس در فرکانس مجاز موتور ضرب شود.
اگر فرکانس مینی موم یا ماکسیموم، نزدیک یا خارج از حدود ذکر شده در بالا باشد، بنابراین قبل از آغاز روند باید با سازنده مشورت شود.
نمونه هایی از طیف سرعت در فهرست زیر آورده شده اند که به عنوان نسبتی از سرعت پایه موتور به مینی موم سرعت بیان شده اند.
نمونه هایی از طیف ثابت و متغیر سرعت گشتاور
سرعت پایه= 2500 RPM
| نسبت طیف سرعت | درصد سرعت پایه موتور | حداقل سرعت (RPM) |
| 2:1 | 50 | 1250 |
| 4:1 | 25 | 625 |
| 10:1 | 10 | 250 |
| 20:1 | 5 | 125 |
| 100:1 | 1 | 25 |
کاربردهای ثابت اسب بخار دارای طیف سرعتی است که سرعت پایه آنها پایینترین سرعت است، نه سرعت بالا.
نمونه هایی از طیف سرعت ثابت اسب بخار
سرعت پایه= 2500 RPM
| نسبت طیف سرعت | درصد سرعت پایه موتور | حداقل سرعت (RPM) |
| 1.5:1 | 150 | 3750 |
| 2:1 | 200 | 5000 |
| 3:1 | 300 | 7500 |
توجه // این نمونه های طیف سرعت، تنها به منظور ارائه دادن می باشند. همه موتورها قادر نیستند تا در این طیفها کار کنند.
گسیختگی گشتاور
Breakaway Torque
موتور باید به اندازه کافی گسیختگی گشتاور داشته باشد تا شروع به کار کند. این امر به روتر قفل موتور یا آغاز گشتاور منتشر شده برای آغاز خط سراسری مربوط نمی شود.
گسیختگی گشتاور توسط موتور ، جریان موجود از کنترل، و تنظیمات کنترل محدود می شود.
اگر گشتاور استاتیک برای راه اندازی به 140 درصد از گشتاور ظرفیت کامل موتور نیاز داشته باشد، ممکن است به کنترل بیشتر و یک موتور با قابلیتهای مناسب گشتاور نیاز باشد.
چندین تکنیک وجود دارند که می توانند برای دستیابی به گشتاور مورد نیاز در قابلیتهای اجزای مورد استفاده ، بکار روند. برای رسیدن به یک پیکره بندی بهینه باید در مورد این تکنیکها با سازنده موتور مشورت کرد.
-
تعیین الزامات شتاب و کاهش سرعت ( زمان و بار)
زمانیکه بار شروع به حرکت می کند، باید تا سرعت عملیاتی مورد نظر شتاب گیرد. موتور باید گشتاور بار را در طی شتاب بعلاوه گشتاور کافی برای شتاب اینرسی بار در زمان مورد نظر تامین کند.
انتخاب موتور تحت تاثیر میزان گشتاور مورد نیاز برای مطابقت با زمان شتاب مورد نیاز و چگونگی اجرای شتاب قرار دارد.
اگر یک موتور برای تولید بیش از 140% از گشتار با ظرفیت کامل بار در طی شتاب مورد نیاز باشد، مشخصات آن را باید بطور واضح عنوان کرد.
مثلا در موتور قلاب جرثقیل گشتاوری در حدود 200% در زمان کندن بار مورد نیاز است.
در طی شتاب، دمای موتور نیز مانند افزایش در بار، افزایش پیدا می کند.
اگر زمان شتاب یک ملاحظه مهم در این کاربرد باشد، شتاب گشتاور مورد نیاز باید تعیین شود ، به گشتاور بار اضافه شود و با گشتاور بار مورد مقایسه قرار گیرد.
ممکن است ضروری باشد که اندازه موتور یا اینورتر بزرگتر شوند تا گشتاوری با شتاب مناسب تولید شود که با زمان شتاب مشخص شده مطابقت داشته باشد.
لازم است که زمان شتاب خاص مورد نیاز، اینرسی انعکاس یافته در شافت موتور، و بار گشتاور بر موتور در طی شتاب را بشناسید.
از فرمول زیر برای محاسبه شتاب گشتاور مورد نیاز استفاده کنید:
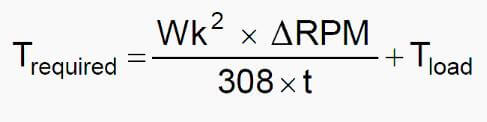
در جاییکه :
- T required= گشتاور برای شتاب بار (lb-ft)
- T load= گشتاور بار در طی شتاب. از میانگین گشتاور برای بارهای گشتاور متغیر استفاده کنید.
- Wk2= اینرسی بار انعکاس یافته برای موتور بعلاوه اینرسی روتر موتور (lb-ft2)
- ΔRPM= تغییر در سرعت مورد نظر موتور
- T= زمان (ثانیه) مورد نیاز برای شتاب موتور
با دانستن شتاب گشتاور مورد نیاز و چگونگی رخ دادن این شتاب، یک کنترل و موتور مناسب می تواند انتخاب شود.
موتور باید قادر باشد تا بوسیله آورلود گشتاور، گشتاور را تامین کند و باید دارای ظرفیت خنک کنندگی باشد تا به فرکانس شروع این آورلودها رسیدگی نماید.
اینورتر باید قادر باشد تا جریان ضروری مورد نیاز برای طول و فرکانسی که در آن اتفاق می افتد را تامین کند.
! یک اینورتر معمولی می تواند کاهش سرعت گشتاور را تا 10-15 درصد از شتاب گشتاور فراهم نماید.
اگر گشتاور بیشتری به منظور مطابقت با زمان کاهش سرعت مورد نظر مورد نیاز باشد، بنابراین اینورتر به یک ترمز دینامیک یا بازیاب نیاز دارد.
توصیه میشود در ادامه انتخاب موتور مطالعه شود:
بررسی انرژی ترمز درایوهای فرکانس متغیر در الکترومارکت
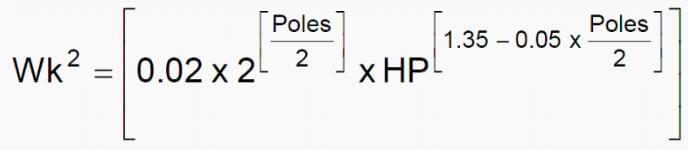
اینرسی روتور (Wk2) در lb-ft2 برای کاربرد موتورهای متوسط AC با تجهیزات ترمز دینامیک ممکن است با فرمول زیر برآورد شود.
-
آورلود Overload
آورلود ممکن برای رسیدگی به اوج بارها در طی چرخه اجرا ، عملیات اضطراری، و رسیدگی به اتفاقات نادر یا برای تسریع بار یا تغییرات سرعت مورد نیاز باشد.
تاثیرات عملیات آورلود ( بالای ظرفیت کامل گشتاور) بر موتورها در زمانیکه با اینورتراجرا می شود، مانند زمانیکه با نیروی برق کار می کند، مشابه است.
به هر حال، ظرفیت آورلود اغلب در محدودیت های سرعت بالا یا پایین برای بعضی از موتورها تغییر می کند.
الزامات آورلود بالای 140 درصد از گشتاور با ظرفیت کامل در سرعت پایه و کمتر یا بیشتر از 110 درصد از گشتاور مجاز در سرعت بالا ، باید بطور دقیق عنوان شود.
گشتاور با ظرفیت کامل، تنها بر اساس تکرار در بعضی از مواقع نیاز است،برای این مواقع آماده باشید.
5.تعیین نوع ماموریت
فرایند پیوسته
یک فرایند پیوسته فرایندی است که موتور در آن برای مدت طولانی در زمانهای مختلف یا برخی از سرعت های ثابت شروع به کار می کند.
تغییرات سرعت، شتابها، یا آورلود هایی که مستلزم گشتاورهای بیشتری با ظرفیت کامل برای موتور هستند، کمیاب هستند.
موتورهای همه منظوره، اساسا برای عملیات پیوسته در فرکانس معمول 50 یا 60 HZ طراحی شده اند.
آنها همچنین در طیف سرعت توصیه شده توسط سازنده در زمانیکه بر کنترل اجرا می شوند، بخوبی عمل می کنند. موتورهای دارای کاربرد محدود که توسط اینورتر تغذیه شده اند برای طیف های گسترده سرعت و کاربردهایی که بیشتر مورد تقاضا هستند، موجود می باشند.
سیکل های ماموریت
کاربردهای سیکل ماموریت ، کاربردهایی هستند که در آنها موتور شروع به کار می کند ، متوقف می شود، و انتقال بین سرعت و بار عادی است و غالبا انجام می گیرد.
چندین ویژگی از این نوع کاربرد بر موتور و اینورتر تاثیر دارد.
- موتور ممکن است در بعضی از بخش های این سیکل خاموش باشد.
خنک کنندگی نرمال در موتورها، تنها زمانی که موتور در حال چرخش باشد، حاصل می شود.
در زمان خاموش بودن با خنک کنندگی کمتر، گرمای ایجاد شده در موتور در طی عملیات ، دیگر پراکنده نخواهد شد.
کمک از سازنده ممکن است برای اطمینان از خنک کنندگی کل=افی برای سیکل ماموریت مورد نظر ، لازم باشد.
بهتر است در این حالات از یک فن اکسترنال استفاده شود.
- ممکن است به گشتاورهایی بالای ظرفیت کامل گشتاور نیاز باشد.
عملیات بالای ظرفیت کامل موتور ممکن است برای شتاب، رسیدگی به اوج بارها، و حتی کاهش سرعت بار مورد نیاز باشد.
عملیات بالای جریان مجاز موتور با حرارت موتور افزایش خواهد یافت.
! این ممکن است مستلزم طبقه بالاتری از دمای عایق، یک موتور مجاز برای آورلود یا ارزیابی سیکل ماموریت برای تعیین میزان خنک کنندگی کافی موتور برای این کاربرد باشد.
- تزریق DC ، ترمز بازیاب یا دینامیک ممکن است برای متوقف کردن موتور مورد نیاز باشد.
صرف نظر از اینکه آیا موتور گشتاور را برای اجرای این کاربرد تولید می کند، نیرو را برای اینورتر بدلیل راه اندازی موتور با بار ایجاد می کند، یا گشتاور را در طی کاهش سرعت با استفاده از جریان DC برای سیم پیچ ها تامین می کند، گرمای موتور تقریبا متناسب با مربع جریان در حین استفاده اتفاق می افند.
این حرارت باید در تجزیه و تحلیل سیکل ماموریت گنجانده شود.
6.ملاحظات دیگر انتخاب موتور
بای پس ( شروع از خط عرضی)
در کاربردهایی که شروع به کار موتور از خط عرضی ( عبور از کنترل)، مورد نیاز باشد، موتور، کنتاکتور و سیم کشی باید برای اجرای بای پس و عملیات کنترل ، دارای اندازه مناسبی باشد.
! این امر بخصوص در زمانی درست است که موتور انتخابی خصوصا برای استفاده با اینورتر طراحی شده باشد، زیرا آن ممکن است دارای ویژگی های آغازین مشابهی به عنوان یک موتور همه منظوره باشد.
فرکانس عملیاتی
عملیات در فرکانس های مختلف می تواند بر این ویژگی های موتور تاثیر بگذارد:
- خنک کنندگی
- گشتاور سرعت پایین که ممکن است به سرعت ولتاژ نیاز داشته باشد
- آورلود
- سرعت عملیاتی با حداکثر ایمنی
- ملاحظات گرمایی
- صدا و لرزش
- ملاحظات پیچشی
کارایی
تصمیم در مورد اینکه آیا از یک موتور با کارایی بالا استفاده شود یا نشود، معمولا به تصمیم برای استفاده از اینورتر بستگی دارد.
معرفی اینورتر -VFD / کاربرد/ اطلاعات
توصیه میشود مطالعه شود: آموزش اینورتر
دانلود فایل بررسی های عملی برای انتخاب موتور استاندارد برای کار با اینورتر های فرکانسی
یک دوره فشرده در مورد VFD و چگونگی انتخاب عملی درایوها و موتورها . هر یک از کاربردها مستلزم نیازهای خاصی هستند و باید با کاربرد در نظر گرفته شده در ذهن مورد ارزیابی قرار گیرند
“با تشکر از مطالعه شما .الکترومارکت را به اشتراک بگذارید. :)” h4=”محبت و دانش را به اشتراک بگذاریم”
“نظرات شما را میخوانیم و به آن ها فکر میکنیم.
اگر روش های دیگری را که حاصل از مطالعه و تجربه شما دوستان عزیز است با ما به اشتراک بگذارید خوشحال میشویم لطفا در قسمت نظرات عنوان فرمایید.
ما در 24 ساعت از 7 روز هفته منتظر شنیدن صدای شما هستیم
02165292580
02165295301
09122659154