موتور کشنده چیست؟ انواع آن و روش های کنترل Traction motor
A traction motor is an electric motor used for propulsion
یک موتور کشنده یک موتور الکتریکی است که برای نیروی محرکه یک خودرو مانند لوکوموتیو الکتریکی یا خودروی جادهای مورداستفاده قرار میگیرد.
موتورهای کشنده برای خودروی ریلی برقی (واحدهای چندگانه برقی) و خودروهای برقی دیگر مانند کشتی های شناور الکتریکی، بالابرها، نوار نقالهها، و اتوبوسهای برقی بهعلاوه خودروهای دارای دستگاههای انتقال الکتریکی (خودروهای دیزلی-برقی- خودروهای هیبریدی برقی) و خودروهای برقی باتری دار مورداستفاده قرار میگیرند.
انواع موتور کشنده و کنترل آن:
موتورهای جریان مستقیم با سیمپیچهای میدانی سری، از قدیمیترین نوع موتورهای کشنده هستند.
این موتورها (موتور کشنده) مشخصه گشتاور سرعت را فراهم میآورند که برای نیروی محرکه سودمند است و گشتاور بالایی را در سرعتهای پایینتر برای افزایش سرعت خودرو فراهم میآورد،و در زمان افزایش سرعت، گشتاور را کاهش میدهد.
با تنظیم سیمپیچ میدان با قابلیت multiple taps ، مشخصه سرعت میتواند تغییر کند و کنترل سرعت را توسط اپراتور بهطور یکنواختتری میسر سازد.
اندازهگیری دیگری از کنترل با استفاده از جفت موتورها در خودرو ارائه شد.
دو موتور برای عملکرد آرام یا بارهای سنگین، میتوانند در سریهای دور از عرضه جریان مستقیم راهاندازی شوند.
در جاییکه سرعتبالاتر مدنظر باشد، این موتورها میتوانند بهطور موازی عمل کنند.
می توانند ولتاژ بالاتری را در هر یک ایجاد نمایند و بنابراین سرعتهای بالاتری را میسر سازند.
بخشهایی از یک سیستم راهآهن ممکن است از ولتاژهای متفاوتی با ولتاژهای بالاتر در مسافتهای طولانیتر بین ایستگاهها و ولتاژ پایینتر نزدیک ایستگاهها، درجاییکه عملکرد آرامتر میتواند سودمند باشد، استفاده کنند.
نوع دیگری از سیستم DC، موتور سری AC بود که الزاماً دستگاه مشابهی است اما با جریان متناوب کار میکند.
ازآنجاییکه جریان آرمیچر و میدان همزمان معکوس میشوند، رفتار موتور مشابه زمانی است که با جریان مستقیم کار میکند.
برای دستیابی به شرایط عملکرد بهتر، خط آهنهای AC اغلب از جریانی در فرکانس پایینتر از عرضه تجاری مورداستفاده برای برق و روشنایی عمومی تأمین میشوند.
نیروگاههای برق ویژه با جریان کشنده یا مبدلهای چرخان برای تبدیل برق تجاری 50 یا 60 هرتز به فرکانس 16 2/3 هرتز مورداستفاده برای موتورهای کشنده AC بکار برده شدند.
سیستم AC، توزیع مؤثر برق را در طول خط آهن و همچنین کنترل سرعت را توسط صفحهکلید روی وسیله نقلیه میسر ساخت.
موتورهای القایی AC و موتورهای سنکرون:
_ساده هستند.
_به تعمیرات و نگهداری زیادی نیاز ندارند.
اما استفاده از آنها به دلیل مشخصه سرعت ثابتشان برای موتورهای کشنده دشوار است.
موتور القایی AC توان مفید را در سرعت محدود تعیینشده توسط ساختار آن و فرکانس منبع تغذیه AC ایجاد میکند.
ظهور نیمهرساناهای برق این امکان را برای قرار دادن درایو فرکانس متغیر بر روی یک لوکوموتیو میسر ساخته است.
این امر طیف گستردهای از سرعتها، انتقال توان AC و موتورهای القایی قدرتمند را بدون سایش قطعاتی مانند جاروبکها و کموتاتورها میسر میسازد.
موتور کشنده و کاربردهای حملونقل:
وسایل نقلیه جادهای
وسایل نقلیه جادهای بهطورمعمول از موتورهای دیزلی و بنزینی با سیستم انتقال مکانیکی یا هیدرولیک استفاده میکردهاند.
در نیمه دوم قرن بیستم، خودروهایی با دستگاههای انتقال الکتریکی ( طراحیشده با موتورهای سوخت داخلی، باتریها یا پیل سوختی) شروع به توسعه کردند یکی از مزیتهای استفاده از موتورهای الکتریکی این است که انواع خاصی از آن میتوانند انرژی را بازیابی کنند ( مثلاً بهعنوان سیستم بازیابی انرژی از ترمز) و ترمز را ایجاد کنند و بهعلاوه راندمان کلی را افزایش دهند.
راهآهنها
راه آهن ها بهطور سنتی، موتورهای DC سیمپیچی شده سری بودند که معمولاً در 600 ولت کار میکردند.

در دسترس بودن نیمهرساناهای پرقدرت ( تریستورها و IGBT) اکنون استفاده از موتورهای القایی AC سادهتر و قابلاطمینانتر به نام موتورهای کشنده آسنکرون را عملی ساختهاند.
موتورهای AC سنکرون نیز گاهی اوقات همانند TGV فرانسه مورداستفاده قرارگرفتهاند.
نصب موتورها
قبل از اواسط قرن 20، اغلب فقط از یک موتور بزرگ برای راندن چند چرخ محرک از طریق میلههای متصل که مشابه میلههای مورداستفاده در لوکوموتیوهای بخار بودند، استفاده میشد.
نمونههای آن عبارتاند از راهآهن DD1، FF1 و L5 پنسیلوانیا و کروکدیلهای مختلف سوئیس.
اکنون این شیوه استانداردی برای ارائه یک موتور کشنده است که هر محور آن ازیک درایو چرخدنده به حرکت درمیآید.
بهطورمعمول، موتور کشنده سهنقطه معلق بین قاب بخش پیشآمدۀ واگن و محور محرک است؛
که به آن “موتور کشنده با دماغه معلق” میگویند.
مشکل چنین آرایشی این است که بخشی از وزن موتور روی فنر قرار ندارد و نیروی ناخواستهای بر مسیر میافزاید.
در خصوص راهآهن معروف GG1 پنسیلوانیا، موتورهای نصبشده بر دو بخش پیشآمده واگن هر محور را از طریق یک درایو توخالی به حرکت درمیآوردند.
لوکوموتیوهای برقی “دوقطبی” ساختهشده توسط جنرال الکتریک برای Milwaukee Road دارای موتورهای درایو مستقیم بودند.
محور چرخان موتور بهعنوان محور چرخها نیز عمل میکرد.
در خصوص ماشینهای قدرتی TGV فرانسه، یک موتور نصبشده بر روی قاب ماشین هر محور را به حرکت درمیآورد.
یک درایو “سهپایه” انعطافپذیری اندکی را در درایو یک همنواختی ایجاد میکند و چرخش واگنهای بارکشها را میسر میسازد.

با نصب موتورهای کشنده نسبتاً سنگین مستقیماً بر روی قاب ماشین قدرتی بجای بخش پیشآمده واگن، دینامیک بهتری حاصل میشود و عملکرد بهتری را با سرعتبالا میسر میسازد.
سیمپیچها موتور کشنده
موتور DC برای سالهای زیادی نقطه اتکای درایوهای کشنده الکتریکی بر لوکوموتیوهای برقی و برقی-دیزلی، واگنهای برقی/ ماشینهای خیابانی و دستگاههای مته زنی الکتریکی دیزلی بود.
که شامل دو بخش زیر است:
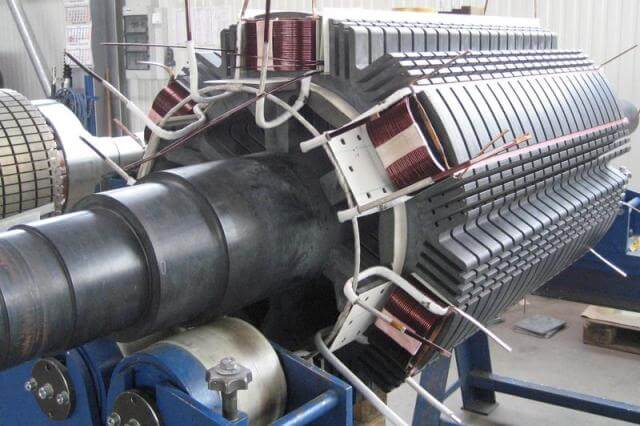
یک آرمیچر چرخان و سیمپیچهای میدانی ثابت در اطراف آرمیچر چرخان نصبشده در دور شافت.
سیمپیچهای میدانی ثابت شامل کویلهای سیمپیچ حلقه لغزان میباشند که بهسختی در داخل قاب موتور قرارگرفتهاند.
آرمیچر مجموعه دیگری از کویلهای سیمپیچ اطراف شافت مرکزی است.
از طریق جاروبکها به سیمپیچهای میدانی که با فنر بارگذاری شدهاند در مقابل دنباله آرمیچر به نام کموتاتور اتصال مییابد.
کموتاتور همه پایانههای سیمپیچهای آرمیچر را جمعآوری میکند،
آنها را در یک الگوی مدور توزیع میکند تا توالی صحیحی از شار جریان را میسر سازد.
زمانی که آرمیچر و سیمپیچهای میدانی بهطور متوالی متصل میشوند، بهکل موتور ” موتور سری” گفته میشود.
یک موتور DC سری دارای مدار آرمیچر و میدان مقاومت پایینی است.
به این دلیل، زمانی که ولتاژ برای آن اعمال میشود، جریان به دلیل قانون اهم بالا است.
مزیت جریان بالا این است که میدانهای مغناطیسی داخل موتور قوی هستند، و گشتاور بالایی را تولید میکنند ” نیروی گردشی” بنابراین آن برای به حرکت درآوردن قطار ایده ال است.
اشکال آن این است که شار جریان در موتور باید محدود شود.
در غیر این صورت موجودی جریان بیشازاندازه میشود و یا موتور و سیستم کابلکشی آن آسیب میبیند.
در بهترین حالت، گشتاور از حالت چسبندگی فراتر میرود و چرخها به لغزش خواهند افتاد.
بهطورمعمول، رزیستورها برای محدود کردن جریان اولیه بکار میروند.
کنترل توان
زمانی که موتور DC شروع به چرخیدن میکند، تعامل میدانهای مغناطیسی داخل آن موجب ایجاد یک ولتاژ داخلی میشود.
نیروی محرکه الکتریکی معکوس (نیروی الکتروموتور) برخلاف جریان و ولتاژ اعمالشده است که توسط اختلاف این دو کنترل میشود.
زمانی که سرعت موتور افزایش مییابد:
ولتاژ داخلی ایجادشده افزایش مییابد،EMF حاصل کاهش مییابد ،جریان کمتری از موتور عبور میکند و گشتاور افت پیدا میکند.
درزمانی که کشش قطار با گشتاور ایجادشده توسط موتورها هماهنگی داشته باشد، موتور طبیعتاً افزایش سرعت را متوقف میسازد.
برای اینکه سرعت قطار همچنان افزایش پیدا کند، رزیستورهای سری مرحله به مرحله سوئیچ میشوند.
در هر مرحله ولتاژ مؤثر افزایش مییابد.بنابراین جریان و گشتاور کمی بیشترافزایش مییابد تا زمانی که موتور بیشتر کار کند.
این میتواند در قطارهای DC قدیمیتر بهصورت صدای گنگ و توخالی زیر طبقه شنیده و احساس شود ،که هر یک با تکان شدید و سریعی همراه است، در حالی که گشتاور در واکنش نسبت به موج جدید جریان ناگهان افزایش مییابد.
زمانی که هیچ رزیستوری در مدار باقی نماند، خط کامل ولتاژ مستقیماً برای موتور اعمال میشود.
سرعت قطار در نقطهای که گشتاور موتور توسط ولتاژ مؤثر کنترل میشود ثابت میماند و با کشیدن برابر است که گاهی اوقات به آن تعادل سرعت گفته میشود.
اگر قطار از یک سطح شیبدار بالا رود، سرعت کاهش مییابد به دلیل اینکه کشش بیشتر از گشتاور است و کاهش در سرعت موجب افت EMF عقبی و بنابراین افزایش ولتاژ مؤثر میشود تا جریان از طریق موتور گشتاور مناسبی را برای هماهنگی با کشش ایجاد نماید.
استفاده از مقاومت سری به دلیل اتلاف زیاد انرژی بهصورت گرما بیهوده بود.
برای کاهش اتلافها، قطارها و لوکوموتیوهای برقی ( قبل ظهور الکترونیک قدرت) برای کنترل موازی-سری نیز تجهیز شده بودند.
ترمز دینامیکی
اگر قطار یک درجه پایین بیاید، سرعت آن افزایش مییابد زیرا کاهش کشش کمتر از گشتاور است.
با افزایش سرعت، ولتاژ نیروی محرکه الکتریکی معکوس بهطور داخلی افزایش مییابد و گشتاور کاهش مییابد تا زمانی که گشتاور دوباره کشیدگی را متعادل سازد.
به دلیل اینکه جریان میدان توسط نیروی محرکه الکتریکی معکوس در یک موتور سری کاهش مییابد، هیچ سرعتی وجود ندارد که نیروی محرکه الکتریکی معکوس از ولتاژ تغذیه فراتر رود و بنابراین یک موتور کشنده DC سری بهتنهایی نمیتواند ترمز دینامیکی یا regenerative braking را ایجاد کند.
بههرحال، طرحهای مختلفی برای فراهم آوردن یک نیروی تأخیری با استفاده از موتورهای کشنده بکار برده شدند.
انرژی تولیدشده ممکن است به منبع برگردد (regenerative braking) انرژی برگشتی یا توسط رزیستورهای سطح پراکنده شود ( ترمز دینامیکی).
چنین دستگاهی میتواند سرعت بار را کاهش دهد و مستلزم اصطکاک نسبتاً کمی برای توقف کامل بار هست.
شتاب خودکار
درقطار برقی، درایور قطار مجبور بود قطع مقاومت را دستی کنترل کند، از1914، شتاب خودکار مورداستفاده قرار گرفت.
این توسط رله شتابدهنده ( اغلب “رله تلهای” نامیده میشود) در مدار موتور حاصل شد که با افت جریان در زمان قطع هر مرحله از مقاومت کنترل شد. همه درایوها باید این کار را انجام دهند و سرعتپایین، متوسط و کامل را انتخاب نمایند ( که از روش اتصال موتور به مدار مقاومت، بهصورت “سری”، “موازی”، و “مقاومت موازی” نامیده میشوند ) و دستگاه خودکار بقیه کارها را انجام میدهد.
درجهبندی Rating
لوکوموتیوهای برقی به طورمعمول دارای یک درجه یک و پیوسته هستند.
درجهبندی یک ساعته حداکثر توانیست که موتورها میتوانند دریک دوره یکساعته بدون افزایش بیشازحد گرما در موتور ایجاد کنند.
چنین آزمایشی با موتورها در +25 °C شروع میشود ( و هوای بیرون مورداستفاده برای تهویه نیز در +25 °C هست).
در USSR، در هر GOST 2582-72 با عایق کلاس N، حداکثر گرمای مجاز در موتورهای DC، 160 °C برای آرمیچر، 180 °C برای استاتور و 105 °C برای کلکتور بود.
درجهبندی یکساعته بهطورمعمول حدود ده درصد بیشتر از درجهبندی مداوم است و با افزایش دما در موتور محدود میشود.
در حالی که موتورهای کشنده از تنظیمات دنده کاهشی برای انتقال گشتاور از آرمیچر موتور به محور محرک استفاده میکنند، بار واقعی قرارگرفته در موتور با نسبت چرخدندهها تفاوت دارد.
در غیر این صورت، موتورهای کشنده “همسان” میتوانند دارای درجهبندی قابلتوجه و متفاوتی برای بار باشند.
یک موتور کشنده آمادهبهکار برای استفاده باربری با نسبت پایین چرخدندهها،گشتاور بالاتری را در چرخها برای دوره طولانیتری در همان سطح جریان ایجاد میکند.
زیرا دندههای پایینتر مزیت مکانیکی بیشتری را برای موتور فراهم میآورند.
در لوکوموتیوهای الکتریکی-دیزلی و لوکوموتیوهای الکتریکی-توربین گازی، درجهبندی اسب بخار موتورهای کشنده معمولاً حدود 81% از عامل محرک اصلی است.
این فرض میکند که ژنراتور الکتریکی 90% از خروجی موتور را به انرژی الکتریکی تبدیل میکند.
موتورهای کشنده 90% از این انرژی الکتریکی را به انرژی مکانیکی تبدیل میکنند. محاسبه: 0.9×0.9=0.81
هر یک از درجهبندیهای Rating موتور کشنده معمولاً تا 1600 کیلووات (2.144 اسب بخار) هست.
سرعت عملیاتی عامل مهم دیگر در زمان طراحی یا تعیین موتورهای کشنده :
آرمیچر موتور دارای حداکثر سرعت چرخشی ایمن است .
در این سرعت یا پایینتر از آن سیمپیچها بهطور امنی در جای خود قرار میگیرند.
بیشتر از این حداکثر سرعت، نیروی سانتریفیوژی موجود در آرمیچر موجب در رفتن سیمپیچها میشود.
در موارد شدید، این میتواند منجر به ” birdnesting” شود در حالی که سیمپیچها با محفظه موتور تماس پیدا میکنند و سرانجام از آرمیچر کاملاً باز و واپیچانده میشوند.
Bird-nesting ناشی از سرعتبالا میتواند در موتورهای کشنده در حال کار در لوکوموتیوهای طراحیشده، یا در موتورهای کشنده در لوکوموتیوهای متوقف ناهماهنگ اتفاق بیفتد که در یک قطار که بهسرعت در حال حرکت است حمل میشوند. دلیل دیگر آن، تعویض موتورهای کشنده فرسوده و آسیبدیده با واحدهایی است که بهطور نادرستی برای استفاده آمادهشدهاند.
آسیب ناشی از اضافهبار و گرمای بیشازحد میتواند درزمانی که گروه آرمیچر و سیمپیچ پشتیبانی میشوند و گیرهها به دلیل استفاده نادرست قبلی آسیبدیدهاند، منجر به bird-nesting پایینتر از سرعتهای مجاز شود.
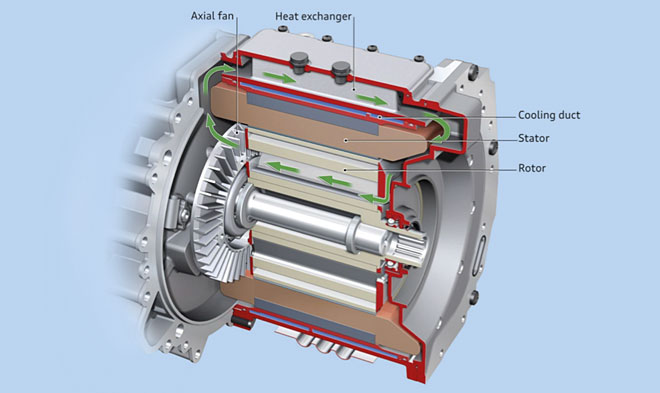
خنککنندگی موتور کشنده
به دلیل وجود سطوح بالای نیرو، موتورهای کشنده همیشه با استفاده از هوای متحرک خنک میشوند.
دستگاههای معمول خنککننده در لوکوموتیوهای برقی-دیزلی U.S شامل یک فن دمنده برقی در معبر تلفیقشده در قاب لوکوموتیو هستند.
مجراهای خنککننده لاستیکی، این معبر را به هر یک موتورهای کشنده متصل میکند.
هوای خنککننده قبل اینکه در فضای اطراف مصرف شود، بهطرف پایین و در سراسر آرمیچرها حرکت میکند.
سلام خدمت مهندس رجبی و تیم الکترومارکت.
بهترین و جدیدترین راه برای کنترل سرعت پیوسته ی این موتور های dc چیه؟مثلا یک موتور قدرتمند dc که ۳۰۰ کیلو وات قدرت داره باید با چه وسیله ای کنترل بشه که کمترین تلفات گرمایی رو داشته باشه؟برای اتومبیل که دائما سرعتش تغییر میکنه.
البته میدونم که الان همه از موتورهای ac استفاده میکنن ولی برام سواله که قبلا از چی استفاده میکردن.مقاله رو خوندم ولی دقیقا نفهمیدم برای کنترل دور موتور dc دقیقا چه دستگاهی لازمه.
سلام ممنون از شما
در روند تکامل و پیشرفت تکنولوژی موتورهای الکتریکی در دهه های اتی این تکنولوژی دستخوش تحولات بسیاری بوده است و در روند این پیشرفت همیشه بهینه سازی مصرف و افزایش راندمان و بهینه سازی سایزینگ مد نظر مهندسین و طراحان بوده است.
برای راه اندازی موتور های dc درایو های مخصوص به آنها ساخته شده و در چند دوره تکامل پیدا کرده است همینطور موتور های AC و همینطور سروو servo موتور ها.
ممنون بخاطر پاسخ .تو ایران درایو های کنترل سرعت (چه برای موتورهای ac چه dc) ساخته میشن؟یعنی اگه تحریم بکنن مشکلی پیش نمیاد؟میتونیم خودمون تولید انبوه کنیم؟
داخل ایران ساخته میشن و مشکلی نیست ولی نه در سطح تکنولوژی های روز دنیا و برند های معتبر ولی کیفیت قابل قبولی دارن برای پروژه های دست پایین.
نکته: شرکت های سازنده داخلی عمدتا مونتاژ میکنند تا ساخت خازن ها مقاومت ها بیس برد اصلی igbt و …..الی آخر در ایران ساخته نمیشود.
امیدوارم بتونیم تولید کننده واقعی بشیم.
بازم ممنون.همینقدر که در مواقع نیاز دستمون تو پوست گردو نمونه خیلی هم خوبه یواش یواش بهترش میکنیم.به امید خدا با وجود مهندسین کاربلد و باسوادی همچون شما که دغدغه شون کارآفرینی و ایجاد اشتغال هست هم ایرن پیشرفت میکنه هم سفره ی کارگرها خالی نمیمونه.
خواهش میکنم و ممنون از شما. تحریم ها معمولا روی روند موجود کردن کالا و قیمت نهایی کالاهای اساسی تاثیر گذار هست و توی این چند سال کالایی نداشتیم که نباشه فقط روند موجود کردن اون کالا خیلی سخت و قیمت نهایی اش خیلی بالا رفته.