تاریخچه اینورتر و مسائل هارمونیکی در اینورتر فرکانس متغیر
هارمونیک ها در سیستم های قدرت با بهره برداری از تجهیزات الکترونیکی در طی دوره ای از عملیات نرمال مرتبط هستند.
مهندسان برق مشخصاتی را بکار برده اند که مسائل اعوجاج هارمونیکی مربوط به اینورتر فرکانس متغیر را به روش های مختلفی آدرس دهی می کند.
در ابتدا برخی از افراد بر این باور بودند که رجوع به IEEE 519 کافی خواهد بود.
اینورتر
با این حال،بسیاری از فروشندگان بر این نظر هستند که IEEE 519 یک استاندارد سیستم است .
برای اینکه بتوان در مشخصات تجهیزات به آن استناد کرد ، مناسب نیست.
این امر، بدون توجه به نتیجه اعوجاج هارمونیکی سیستم ، موجب شد:
تهیه تجهیزات مورد نیاز در پروژه ها توسط بسیاری از فروشندگان با کمترین هزینه تمام شود.
در برخی موارد، شرکت های توزیع برق، استاندارد IEEE 519 را به عنوان یک نیاز و شرایطی برای ادامه سرویس دهی الکترونیکی به مشتریان (با تجهیزات تولید هارمونیک) عرضه کردند (به دلیل عدم اطمینان از کیفیت توان که می تواند مشتریان دیگر را تحت تاثیر منفی خود قرار دهد).
نگرانی در مورد هارمونیک های اینورتر فرکانس متغیر
در پاسخ به نگرانی رو به رشد در رابطه با هارمونیک ها، برخی از شرکت های مهندسی با استفاده از مارک های خاص برای فیلتر و یا بکارگیری فن آوری های مانند ترتیبات 12 یا 18 پالسه بصورت ویژه به مشخصات اینورتر فرکانس متغیر خود می پردازند.
اغلب تصور می شد که نیازی به تایید پیگیری و صدور گواهینامه برای تست انجام شده، نمی باشد.
در حالی که مشکلات فعلی ممکن است مورد توجه قرار نگیرند،
در نتیجه دربسیاری از تاسیسات، توصیه های IEEE 519 بکار گرفته نشده است.
به عنوان مثال، در برخی از مشخصات به یک اینورتر فرکانس متغیر با یک یکسو کننده 12 پالسه نیاز بوده ولی بدون چوک ورودی که با تغییر فاز اجازه ی هرگونه کاهش هارمونیکی را می دهد، عرضه می شود .
همچنین، نتایج تست سازنده فیلتر معمولا بر اساس شرایط ولتاژ آزمایشگاهی بوده
که در بسیاری از سیستم های الکتریکی تجاری وجود ندارد.
مقاومت ظاهری منبع سیستم الکتریکی و شرایط بارگذاری اثر قابل توجهی در کاهش هارمونیک ها خواهد داشت.
روش های توصیه شده برای کنترل هارمونیک ها
منشاء و سرچشمه ی استاندارد-1981 IEEE 519 در نتیجه ی نگرانی های ایالات متحده مبنی بر تاثیرگذاری هارمونیک ها بر ارائه خدمات شهری به مشتریان شبکه بوده است.
THD
پیشنهاد این بود که ولتاژ THD ( مجموع اعوجاج هارمونیکی ) را در PCC ( نقطه اتصال مشترک) 3 الی 5 درصد کاهش دهند.
در سیستم عمومی مقدار مجاز 5٪ و در کاربرد خاص مثل بیمارستان ها نیازمند محدود شدن ولتاژ THDبه 3٪ هستند.
در سال 1992 این پیشنهاد عملی، بصورتی که کل اعوجاج مورد تقاضا (TDD) در محدوده 5 الی20 درصد محدود باشد
(بسته به اندازه تاسیسات نصب و راه اندازی) به روز رسانی شد.
(TDD) به اعوجاج هارمونیکی کل جذر مجموع مربعات در درصدی از حداکثر ظرفیت بار جاری مورد تقاضا (در هر15 الی 30 دقیقه فرصت زمانی) گفته می شود. حد ماکزیمم آن، بستگی به نسبت ISC/IL که تاثیر مشتری را بر روی سیستم های اعوجاج الکترونیکی اندازه گیری می کند، دارد.
هرچه مطلوبیت شبکه بالاتر باشد، امکان اتصال کوتاه (ISC) کمتر می شود و یا هرچه بار کوچکتر باشد، محدوده مجاز بالاتر خواهد بود.
جدول زیر را مشاهده کنید.
| موقعیت ISC/IL | مقدار IEEE مجاز در TDD |
| 5.0 | <20 |
| 8.0 | 20 < 50 |
| 12.0 | 50 < 100 |
| 15.0 | 100 < 1000 |
| 0.0 | > 1000 |
PCC
(PCC) می تواند توسط مهندس در هر نقطه ای از سیستم (تابلو سلول MCC) تعریف شود.
اما بهتر است نقطه جایی باشد که مشتری به شبکه متصل می شود ( مگر آنکه ذکر شده باشد).
حتی اگر مهندسان در استفاده از IEEE 519 در نقاط دیگر سیستم به منظور نیاز به انطباق سیستم، آزاد باشند،
این استاندارد هنوز هم به عنوان یک مشخصه سیستم در نظر گرفته می شود.
از سوی دیگر، استاندارد 61800 IEC اروپا، (به جای داشتن مبنای سیستمی)، برمبنای تجهیزات استوار می باشد.
اثرات ناشی از هارمونیک ها
بر اساس IEEE 519، تجهیزات ارتباطی و پردازش داده، بیشتر مستعد بروز هارمونیک ها هستند.
” اکثر بارهای موتور بطور نسبی متحمل هارمونیک ها می شوند”.
با این حال، IEEE 519-1992 جلو تر از این پیش رفته و می گوید
” حتی در مواری که تجهیزات از نظر مستعد بودن کمترین حد را دارند، هارمونیک ها می توانند مخرب باشند”.
به عنوان مثال، در مورد اجاق، آنها می توانند تنش های حرارتی یا ولتاژ دی الکتریک بوجود آورده، که باعث کاهش عمر عایق الکتریکی می شود.
اثر عمده ی ولتاژها و جریان های هارمونیکی در چرخش کنترلر (القاء و همزمان)، بعلت افزایش حرارت ناشی از تلفات آهن و مس در فرکانس هارمونیک است.
در نتیجه اجزای هارمونیک بهره وری ماشین را تحت تاثیر قرار داده و بر توسعه گشتاور تاثیرمیگذارد.
سطح اعوجاج هارمونیکی تمایل به افزایش در طول زمان در ساختمان های معمولی و تجهیزات تولید دارد.
این نتیجه ی ارتقاء (بروزرسانی) و یا اضافه شدن به تجهیزات الکترونیکی مانند کامپیوتر، سیستم های UPS، تجهیزات دفتری و اداری، اینورتر فرکانس متغیر ، سیستم های کنترل و غیره است.
اثر بارهای مولد هارمونیک باید از پیش برنامه ریزی شده باشد.
انواع تجهیزات کاهش دهنده ی هارمونیک ها
تجهیزات اولیه ی کاهش دهنده هارمونیک شامل فیلترهای تنظیم شده شانت بود که جریان های هارمونیک را به یک فیلتر تله مانند جذب می کرد.
بهسازی های بعدی شامل نصب یک سری چوک ورودی برای کمک به حل مسائل رزونانس بود.
در این نوع فیلتر، افزایش ولتاژ اغلب یک مشکل به حساب می آمد.
اینورترهای فرکانس متغیر 12 پالسه نیز از موارد اولیه ای بود که برای کاهش هارمونیک تحقق پذیرفت.
هنگامی که دو اینورتر فرکانس متغیر با اندازه و بار یکسان وجود داشته باشد، ترانسفورماتورها ی دلتای ساده (و دلتا- وای)، نصب شده با اینورتر فرکانس متغیر ، می تواند همان نتایج 12 پالسه را تولید کند.
هرچقدر که کاهش دهنده های خطر هارمونیکی متداول تر شدند،
فیلترهای باند پهن و اینورتر فرکانس متغیرهای 18پالسه بیشتر در بازار ظاهر شدند.
فیلترهای باند پهن قادر به کاهش سطح هارمونیک به میزان 10 الی 15٪ می باشند اما حجیم و گران هستند اما اینورتر فرکانس متغیر های 18پالسه ، در عین گران بودن، قادر اند سطح هارمونیک را به سطوحی پایین تر از 3 الی 5٪ برساند، البته در صورتی که ترانسفورماتور تغییر فاز به درستی طراحی شده باشد.
فیلترهای هیبریدی کاهش خطر هارمونیک
در چند سال گذشته فیلترهای هیبریدی توانسته اند سطح کاهش دهنده های هارمونیک را به 8 الی 12٪ کاهش دهند.
فیلترهای هیبریدی دارای اجزای هر دو فیلتر ” تنظیم شده شانت” و ” باند پهن ” هستند.
هنگامیکه بهینه سازی میشوند، نه تنها مقرون بصرفه ، بلکه میتواند نتایج را به محدوده 5 الی 8٪ برساند.
(در صورتی که بهینه سازی شده باشد و با یک سیستم اینورتر ، به درستی یکپارچه شده باشد).
ذکر این موضوع نیز جالب توجه است که فیلترهای باند پهن بهترین عملکرد را در بار سبک و فیلترهای هیبریدی بهترین عملکرد را در زمان بار کامل ارائه می دهند.
هزینه کاهش خطر هارمونیک ها
مانند تمام فن آوری ها، هزینه های اولیه برای کاهش اعوجاج هارمونیکی در تجهیزات الکترونیکی قدرت، بالا بوده و گاهی هم منجر به دو برابر شدن هزینه های تجهیزات می شود.
مشخصات سیستم به کاهش دهنده های هارمونیکی نیازمند بوده، از این رو هزینه ها کاهش یافت. به عنوان مثال، بالاست های الکترونیکی فلورسنت یک اضافه هزینه اندکی در ضریب قدرت بالای جدیدتر و طراحی های کم اهمیت THD ایجاد می کند.
سیستم های UPS با اعوجاج هارمونیکی پایین ، در حال حاضر کمتر از 20٪ هزینه مجموع را شامل می شود و برخی از تولید کننده تنها طراحی های کم اهمیت THD را ارائه می دهند.
در حالی که اینورتر فرکانس متغیر هایی که در آینده طراحی می شوند می توانند موجب کاهش هزینه ها، تصحیح کننده ی هارمونیک های فعلی یا اینورتر های فیلتر شده ای باشند که در حال حاضر، 20 الی300٪ هزینه مجموع، بسته به سایز HP و سطح THD مورد نیاز و آپشن های مورد نیاز در بسته بندی اینورتر را تشکیل می دهند.
جدول مقایسه هزینه ها را در زیر مشاهده کنید:
| مقدار HP اسب بخار | ۱۰HP | ۳۰HP | ۱۰۰HP | ۳۰۰HP |
| سیستم VFD در شرکت Bare Bones NEMA1 | $۱,۰۲۵ | $۲,۳۹۸ | $۶,۴۰۰ | $۱۸,۰۲۵ |
| سیستم VFD نمونه با مدار شکن، بای پس و راکتور بهینه ( ۳۰ الی ۴۰ % THD) | $۲,۲۶۰ | $۳,۸۲۳ | $۹,۰۶۷ | $۲۶,۴۷۴ |
| سیستم VFD با نمونه جداگانه فیلتر هارمونیکی تنظیم شده ی پایه شنت پیکربندی سیستم ۱۲پالسه ( ۱۵ الی ۲۰ % THD) | $۳,۷۹۱ | $۷,۳۰۵ | $۱۴,۶۹۲ | $۳۸,۲۷۲ |
| سیستمVFD با فیلتر هارمونیکی یکپارچه هیبریدی ( ۷ الی ۱۰ % THD) | $۳,۰۰۶ | $۴,۸۱۸ | $۱۱,۲۱۵ | $۳۳,۳۶۶ |
| سیستمVFD با پیکربندی ۱۸پالسه / ترانسفورماتور تغییر فاز ( ۴ الی ۶ % THD) | نامشخص | $۱۱,۵۸۲ | $۱۷,۷۲۵ | $۴۰,۹۱۳ |
| سیستمVFD با یک سو کننده فعال یا فیلتر فعال یکپارچه ( ۳ الی ۴ % THD) | $۴,۳۱۰ | $۸,۶۱۹ | $۲۱,۸۶۷ | $۵۸,۵۲۴ |
از جدول بالا می توان دید که ترتیبات فیلتر تنظیم شده شنت استاندارد و یکسو کننده های 12 پالسه با چوک تغییر فاز، در اهداف کلی اینورتر ها کاملا از رده خارج و قدیمی شده اند.
این بر مبنای هزینه های حق العمل و بهبود در کاهش حاشیه ای مقدار THD است. برای برآورده کردن استانداردهای IEEE 519-1992، بیشتر مشخصات تاسیسات، به تجهیزاتی نیاز دارند که بتواند محدوده ی THD فعلی را به 8 الی 15٪ محدود کند.
دراستفاده از مقرون به صرفه ترین روش های کاهش دهنده هارمونیک ها ، معمولا نتایج به طور متوسط 20 الی 30٪ بیش از هزینه معمول بسته بندی سیستم اینورتر می باشند.
نصب و راه اندازی با اینورتر های بسیار بزرگ و درصد بسیار بالایی از کل بار در اینورتر، گاهی اوقات نیاز به یک سطح 5 درصدی از THD دارد که منجر به اضافه هزینه 50 الی100 درصدی می شود.
باید به این نکته از جدول اشاره کرد که اینورتر های کوچک در پیکربندی 18 پالسه عملی نیستند.
همچنین، یکسو کننده ها ی فعال و فیلترها به طور کلی گران ترین راه حل های امروزی هستند
اما اعتقاد بر این است که با افزایش حجم آنها ، در آینده بسیار مقرون به صرفه تر خواهند شد.
ملاحظات اندازه گیری
هنگامی که یک شبکه از استاندارد IEEE 519-1992 به عنوان شرایط سرویس دهی استفاده می کند،
PCC میتواند بعنوان نقطه ای که شبکه ، برق را از آن نقطه به مشتری می رساند، طراحی شود.
اعوجاج هارمونیکی می تواند هم از نظر ولتاژ THD و TDD فعلی (در بالا توضیح داده) اندازه گیری شود.
از منظر IEEE 519-1992 و چشم انداز شبکه، اینکه مقدار درصد THD چقدر باشد، زمانی دارای اهمیت کمتر است که تجهیزات در زمان کاهش بار، راه اندازی می شوند، همانطوری که در اینورتر ها معمول است.
این مهم است ، زیرا بسیاری از فن آوری های کاهش دهنده هارمونیک ها برای حداکثر عملکرد در بار کامل طراحی شده اند.
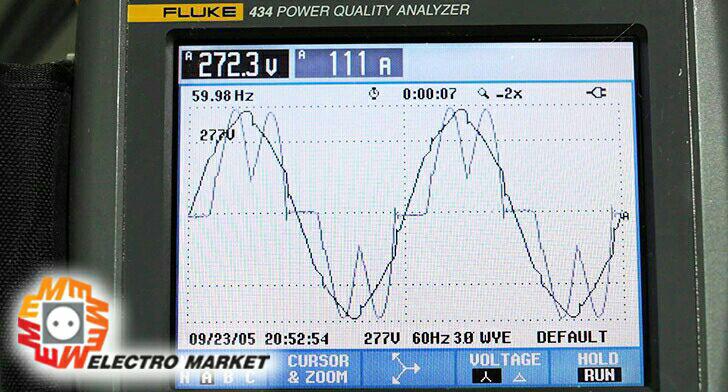
به عنوان مثال، یک اینورتر فرکانس متغیر با مقدار HP 100، که با بار کامل عملیاتی شده است ، ممکن است در حالت بدون فیلتر 43 آمپر (از 124A برای 35٪ THID ) از اعوجاج فعلی را در بار کامل و 9 آمپر (از 124A برای 7٪ THID) را در حالت با فیلتر تولید کند.
در سرعت 80٪ ، می تواند تا 29 آمپر (از 75A برای 38٪ THID) بدون فیلتر و 8 آمپر (از 75A برای 11٪ THID) با یک فیلتر تغییر کند.
همچنین، در شبکه ی PCC ، یک ساختار عملیاتی با همان اینورتر فیلترشده ی HP100، بر روی یک فن می تواند مقدار 7٪ را برای THID اندازه بگیرد ، البته زمانی که بطور خودکار شروع بکار کرده باشد که می تواند مقدار THID را به کمتر از 5 درصد زمانی که یک بار خطی 56 آمپری دیگر مانند کمپرسور روشن می شود، تغییر دهد.
در همان زمان، دیگر بارهای غیر خطی مانند کامپیوتر، دستگاه آسانسور و سایر تجهیزات الکترونیکی، در مد یکسان باعث افزایش اعوجاج سیستم خواهند شد، که باید این موضوع را در نظر گرفت.
مهم است مهندسی که اینورتر ها را مشخص می کند، بارهای دیگر را در ساختمان یا مرکز در نظر بگیرد.
سپس مشخص کند که کدام یک از سطوح اعوجاج هارمونیکی در ملاحظات مربوط به هزینه اضافه شده، قابل قبول خواهد بود.
توصیه ها
با در نظر گرفتن اطلاعات ارائه شده در این مرحله، می توان دید که یک مهندس به منظور تطابق با شیوه ی توصیه شده، که در IEEE 519-1992 مشخص شده است ، باید به دقت بارهای تاسیسات و تجهیزاتی که به آنها سرویس می دهند را در نظر بگیرد.
امکانات قدیمی تر که با تجهیزات الکترونیکی به روز رسانی شده است،
به احتمال زیاد نیاز به فیلتر های اضافی در برخی از نقاط خواهند داشت.
در تاسیسات جدید، که تجهیزات غیر خطی مانند اینورتر ها را مشخص می کند، فیلترها و یا تکنیک های کاهش دهنده، می توانند شامل طراحی باشند تا در نتیجه، آمپر اعوجاج جاری به یک سطح خاص و یا محدوده ای که برای برآوردن هدف کلی مناسب است، محدود شود.
قاعده کلی شصت دست می تواند در زیر ارائه شود:
سطح 1 :
بدون داشتن تجهیزات کاهش دهنده ی خطرات مربوط به هارمونیک ها:
هنگامی که یک تاسیسات نسبتا بزرگ با مقدار قابل توجهی از بار خطی در مقایسه با بار غیر خطی است،
یک یا دو اینورتر کوچک زیر 5 یا 10 اسب بخار ممکن است نتواند هر فیلتر هارمونیک خاص و یا تکنیک کاهش دهنده خطر هارمونیک را توجیه کند.
همچنان توصیه می شود که به مقاومت ظاهری منبع در قالب یک راکتور ساده AC و یا DC اضافه شود.
علاوه بر ارائه تجهیزات حفاظت، این موضوع می تواندباعث شود که اعوجاج جاری کمتر از 40٪ باقی بماند.
سطح 2 :
استاندارد فیلتر کردن هارمونیک های قفسه ای و یا تجهیزات کاهش خطر:
تجهیزات کاتولوگ تولید کنندگان به طور معمول برای کاهش هارمونیک ها در سطوح 12 الی20٪ در دسترس است.
امکاناتی که مقدار متوسطی از بار غیر خطی در مقایسه با بار خطی دارند ،
باید تجهیزات کاهش دهنده هارمونیک را جزو بخش خاصی از خصوصیات اینورتر قرار دهند.
مقدار درصدی THD در بار کامل (اندازه گیری شده در تجهیزات)، باید با هدف رسیدن به سطح استاندارد IEEE 519-1992 TDD در PCC مشخص شود.
مثال # 1 را مشاهده کنید.
سطح 3 :
طراحی گسترده یا بسیار بهینه شده ی اینورتر ها یا تجهیزات کاهش دهنده ی هارمونیک ها:
فیلترهای بسیار بهینه سازی شده و یا سیستم های اینورتر 18پالسه ، می توانند اصلاح هارمونیکی شوند
تا اجازه ندهند که مقدارTHD ، بیش از 3 الی 5٪ در بار کامل افزایش یابد.
تجهیزاتی که عمدتا بارهای غیر خطی دارند ممکن است نیاز به خصوصیاتی داشته باشند که تعریفی از اینورتر است .
اعوجاج هارمونیک اضافه ای را نسبت به سطح مورد نیاز توسط IEEE 519-1992 در شبکه ی PCC ایجاد نمیکند.
مثال شماره ی 3 را مشاهده کنید:
مثال شماره 1
یک مهندس می خواهد یک اینورتر فرکانس متغیر HP100 را به یک ساختمان موجود با یک بار اندازه گیری شده ی A500 و مقدار TDD 4 درصد اضافه کند.
او می خواهد 8٪ از TDD را در PCC ، برای دستیابی به استاندارد IEEE 519-1992 حفظ کند.
برای دستیابی به سطح 8٪ او می تواند اجازه دهد که 20 آمپر دیگر از اعوجاج هارمونیکی به 20 آمپر که در حال حاضر وجود دارد اضافه شود.
با یک بار کامل HP 100 از A 124 مقدار ITHD ، 16٪ خواهد شد و خصوصیات یک فیلتر به طور مناسب مشخص خواهد شد.
مثال شماره 2
یک ساختمان جدید برای عملیات ساخت و ساز با بار الکتریکی تخمین زده شده ی A 2000 و حداکثر مقدار 5 درصد ITHD ، برای دستیابی به استاندارد IEEE 519-1992 در نظر گرفته شده است.
5٪ از بار، در سطحی معادل50 درصد از ITHD، غیر خطی در نظر گرفته می شود، علاوه بر (5) HP 15، (5) HP60 و اینورتر های (2) HP 75 در تجهیزات HVAC 682 آمپر. با 50 آمپر بار غیر خطی موجود، فقط 50 آمپر اعوجاج بیشتر مجاز است (حدود 7 درصد از بار کامل اینورتر ها).
بطور صحیح، درایوهای فرکانس متغیر(اینورتر) با تجهیزات کاهش دهنده هارمونیک ها مشخصا معرفی می شوند و اجازه افزایش بیشتر از 7٪ را به ITHD در بار کامل نمی دهند.
مثال شماره 3
یک ایستگاه پمپاژ در حال طراحی است که 50 آمپر روشنایی و مصارف برقی خواهد داشت.
و باقی مانده به مصرف پمپ هایی با قدرت (3) HP 500 با اینورتر می رسد.
اگر IEEE 519-1992 نیاز به 5٪ TDD در شبکه ی PCC دارد،
واضح است که هر اینورتر نیز باید به حدود 5٪ ITHD محدود شود.
پیوست A: توصیه های برای کاهش هارمونیک ها در مشخصات VFD
توصیه های زیر برای مشخص کردن اینورتر ها بمنظور دستیابی به نتایج مطلوب در کاهش هارمونیک ها داده شده است :
شامل یک قسمت در ابتدای بخش عمومی تحت عناوین ” موارد مشمول کار ” و یا “شرح کار”.
تجهیزات کاهش دهنده ی خطر هارمونیک ها در اینورتر باید به عنوان بخشی از بسته بندی یکپارچه ی اینورتر برای پاسخگویی به سطوح THD ، مورد نیاز در بخشی با عنوان “الزامات اعوجاج هارمونیک “، گنجانده شود.
بخش شامل “تضمین کیفیت”
استاندارد 1992 – 519IEEE روش هایی را برای کنترل هارمونیک در سیستم های قدرت الکتریکی توصیه می کند ( بر اساس سطوح شناسایی شده توسط مهندس ، مندرج در بخش “الزامات اعوجاج هارمونیکی”).
بخش شامل سابمیتال ( روند تحویل دهی مدارک دیزاین شرکت)
ارسال نمونه شکل موج جریان ورودی مورد انتظار.
این موضوع می تواند شامل نمونه هایی از تاسیسات قبلی با تجهیزات کاهش دهنده هارمونیک بسته بندی شده ی مشابه با اینورتریکپارچه باشد.
داده های فرستاده شده باید پاسخگوی سطوح مورد نیاز در بخش “الزامات اعوجاج هارمونیکی” باشند.
بخش شامل “تولید کنندگان قابل قبول”
فروشندگان / تولید کنندگان ثابت کرده اند که توانایی پاسخگویی به الزامات این مشخصات را دارند ،
از جمله تجهیزات کاهش دهنده هارمونیکی یکپارچه و راه اندازی الزامات مندرج در زیر:
مدیریت شرکت انرژی – استفاده از موتور درایوها در سیستم های بین المللی بسته بندی VFD با فیلترهای بهینه سازی شده هارمونیکی یکپارچه.
(رجوع به پیوست B) فروشندگان متقاضی تایید شدن، باید گواهینامه خود را ضمیمه مشخصات کامل کرده و حداقل 10 روز قبل از پیشنهاد قیمت ارسال کنند.
اطلاعات باید شامل تجهیزات کاهش دهنده هارمونیکی یکپارچه پیشنهادی، همراه با نمونه شکل موج ارائه شده از حداقل سه تاسیسات محلی، که برای حداقل سه سال، عملیاتی بوده اند، باشد.
تنها فروشندگان ذکر شده، و یا تایید شده کتبی توسط ضمیمه ، برای پیشنهاد قیمت، تایید شده می باشند.
بخش شامل “ساخت و ساز”
سیستم VFD و تجهیزات مرتبط با کاهش دهنده های هارمونیکی باید بعنوان یک بسته بندی کامل مستقل عرضه شوند
که توسط یک تولید کننده واحد که به طور منظم ، درگیر تولید همان محصولات و حفظ مسئولیت کامل سیستم پشتیبانی است، تولید شده باشد.
تولید کننده سیستم VFD باید تمام اجزاء و تجهیزات مورد نیاز را برای پاسخگویی به ویژگی های این مشخصات و عملکرد آنها به عنوان یک UL واحد(یا معادل آن) در سیستم برچسب زده شده، یکپارچه سازی کند.
فروشندگان اجازه تهیه تجهیزات غیر یکپارچه ( و یا تجهیزاتی که نیاز به پیمانکار برای نصب و استقرار و یا سیم کشی قطعات جداگانه دارند) را ندارند.
فروشندگان تهیه تجهیزات، که توسط یک تولید کننده واحد ضمانت نشده اند ، مجاز نیستند.
اختیاری – درب جلو نصب شده و شاخص فیوز دمیده ، باید تمامی فازها و همه فیوز های مرتبط با خازن فیلتر های هارمونیکی را شامل شوند.
بخش شامل “اعوجاج هارمونیکی”
استاندارد IEEE 519-1992 – کنترل هارمونیکی در سیستم های قدرت برقی باید یک نیاز برای این پروژه باشد.
فیلتر هارمونیک (غیر فعال و یا فعال)، دستگاه های افزایش فاز، و یا اجزای دیگری که برای کاهش THD ولتاژ هارمونیکی تا 5٪ (درج الزام 3٪ یا 5٪) و کاهش THD فعلی به 8٪ (درج الزام 3 الی20٪) مورد نیاز است باید در سطوح حداکثر، بخشی جدایی ناپذیر از سیستم VFD باشند.
اندازه گیری مورد قبول باید بر اساس (درج یکی از موارد زیر) افزایش THD (در طول ظرفیت عملیاتی کامل VFD در مقایسه با سراسر خط عملیاتی) در پایانه های قطع کننده مدار VFD یا اندازه گیری واقعی THD در پایانه های قطع کننده مدار VFD ، در طی عملیات با بار کامل VFD باشد.
طرح هایی که فیلترهای تنظیم شده شنت را بکار می برند باید طوری طراحی شوند
که جلوی ورود هارمونیک های خارجی که می توانند باعث رزونانس سیستم و یا خرابی فیلتر شوند را بگیرند.
در محاسبات مربوط به حمایت از طرح، که شامل یک سیستم تجزیه و تحلیل جریان هارمونیکی است،
باید به عنوان بخشی از روند سابمیتال برای فیلترهای تنظیم شده شنت در نظر گرفته شود.
هر گونه از طراحی های مربوط به فیلتر که باعث افزایش ولتاژ در پایانه های VFD می شود
باید مدارکی را شامل شود که در تطابق با ولتاژ متغیر کل سیستم دارای دامنه تغییرات 10 ± درصد باشد.
مستندات منطبق با کیفیت توان، باید بخشی از راه اندازی مورد نیاز توسط عرضه کننده VFD باشد.
تست اندازه گیری سایت واقعی کار باید در بار کامل انجام شده و در کتابچه راهنمای بهره برداری مستند باشد.
تجهیزات اندازه گیری هارمونیک ها استفاده شده برای صدور گواهینامه، باید گواهی فعلی درجه بندی Nits را داشته باشند.
گزارش آزمون نهایی باید مورد بررسی و صدور گواهینامه انطباق باید توسط یک مهندس حرفه ای با مجوز (PE) مهرشود.
اختیاری- داده ها (متنی و گرافیکی) باید طوری عرضه شوند که ولتاژ و شکل موج جریان THD (یا TDD) و تجزیه و تحلیل طیف هارمونیکی منفرد ، نشان دهنده ی انطباق با استانداردهای بالا باشد.
بخش شامل “سیستم راه اندازی و صدور گواهینامه”
انجام و مستند سازی تست انطباق اعوجاج هارمونیکی، همانطوری که در بخش “اعوجاج هارمونیکی” از این خصوصیات شناخته شده است.





یک نظر