
این راهنما با هدف ارائهی توضیحات جامع و کاربردی پیرامون تنظیمات پارامترهای اینورتر Teco MA7200 تدوین شده است. این مدل از اینورترها بهواسطهی قابلیتهای فنی بالا، پایداری عملکرد، و تطابق با کاربردهای متنوع صنعتی، از پرکاربردترین تجهیزات کنترلی در سیستمهای اتوماسیون، بهویژه در صنایع آسانسور، تهویه، و خطوط تولید محسوب میشود.
در این مستند، کلیهی پارامترهای قابل تنظیم، عملکرد هر کدام، مقادیر پیشفرض، و پیشنهادهای تخصصی برای تنظیمات بهینه بر اساس تجربهی میدانی و توصیههای شرکت سازنده گردآوری شدهاند. همچنین با استناد به تجربیات تیم فنی و منابع معتبر وبسایت الکترومارکت، سعی شده راهنمایی عملی، دقیق و قابل اعتماد برای مهندسین و تکنسینهای برق صنعتی فراهم گردد.
این راهنما مناسب افراد فعال در حوزههای نصب، تعمیر، نگهداری، و راهاندازی درایوهای صنعتی است و میتواند به عنوان مرجعی آموزشی و فنی در پروژههای اجرایی یا آموزشی مورد استفاده قرار گیرد.
🛡️ نکات ایمنی و استانداردهای صنعتی برای درایو Teco MA7200
رعایت ایمنی برای جلوگیری از حوادث ضروری است.
- استانداردها: مطابق با IEC 61800-5-1 و EN 50178 (حفاظت الکتریکی).
- قبل از کار، برق را قطع کنید و از PPE (مانند دستکش) استفاده کنید.
- تهویه: حداقل 10cm فاصله از دیوارها برای خنکسازی.
- زمینکاری: همیشه ترمینال E را به زمین متصل کنید.
- در محیطهای مرطوب یا گردوغبار، از محفظه IP54 استفاده کنید.
🔧 مشخصات کلی درایو TECO MA7200:
- توان خروجی: از 0.75 کیلووات تا 55 کیلووات
- انواع کنترل:
- Open Loop (کنترل بدون انکودر)
- Closed Loop (کنترل با انکودر – AB Encoder)
- نوع موتور: مناسب برای موتورهای القایی آسنکرون (IM)
ابعاد و وزن درایو Teco MA7200 برای نصب و طراحی فضای مناسب در تابلوهای صنعتی اهمیت دارد. این بخش شامل اطلاعات ابعاد، وزن، و نکات نصب برای درایو و کیپد JNEP-36 است که برای مدلهای مختلف توان (0.75 تا 55 کیلووات) ارائه شده است.
ابعاد و وزن درایو
ابعاد درایو بسته به توان (kW) و نوع ورودی (تکفاز یا سهفاز) متفاوت است. جدول زیر ابعاد و وزن تقریبی را برای مدلهای رایج نشان میدهد:
|
مدل (توان) |
ابعاد (mm) (ارتفاع × عرض × عمق) |
وزن تقریبی (kg) |
نوع ورودی |
|---|---|---|---|
|
0.75–2.2 kW |
200 × 110 × 150 |
1.5–2.0 |
تکفاز 230V |
|
0.75–5.5 kW |
250 × 130 × 170 |
2.5–3.5 |
سهفاز 230V/460V |
|
7.5–15 kW |
300 × 175 × 190 |
5.0–7.0 |
سهفاز 230V/460V |
|
18.5–30 kW |
400 × 250 × 210 |
10.0–15.0 |
سهفاز 230V/460V |
|
37–55 kW |
550 × 320 × 250 |
20.0–30.0 |
سهفاز 460V |
ابعاد و وزن کیپد JNEP-36
کیپد JNEP-36 بهصورت استاندارد با درایو عرضه میشود و قابل جدا شدن برای نصب در تابلو یا استفاده بهصورت ریموت است.
-
ابعاد: 70 × 110 × 20 میلیمتر (ارتفاع × عرض × عمق).
-
وزن: حدود 0.2 کیلوگرم.
-
درجه حفاظت: IP20 (مناسب محیطهای داخلی خشک، برای محیطهای مرطوب از محفظه IP54 استفاده کنید).
-
اتصال: کابل RJ-45 (حداکثر طول 5–10 متر برای نصب ریموت).
🛠️ راهنمای نصب فیزیکی درایو Teco MA7200
نصب صحیح درایو Teco MA7200 برای عملکرد ایمن، پایدار، و جلوگیری از خطاهای حرارتی یا الکتریکی ضروری است. این بخش بر اساس دفترچه راهنمای رسمی TECO، مراحل نصب فیزیکی، تهویه، و اتصالات اولیه را توصیف میکند. قبل از نصب، منبع تغذیه را قطع کنید و از تجهیزات ایمنی (PPE) استفاده نمایید.
مراحل نصب گامبهگام
- بررسی اولیه: جعبه درایو را باز کنید و برای آسیبهای حملونقل بررسی کنید. مدل (مانند MA7200-2001-N1 برای 230V/1HP) را با نیاز پروژه تطبیق دهید.
- انتخاب مکان نصب: درایو را در محیط خشک، بدون گردوغبار، و دور از منابع حرارتی، رطوبت، یا ارتعاش نصب کنید. دمای محیط: -10 تا +40 درجه سانتیگراد (برای دمای بالاتر، از فن اضافی استفاده کنید). رطوبت: کمتر از 90% بدون چگالش.
- نصب روی دیوار یا تابلو: درایو را بهصورت عمودی (vertical) نصب کنید. از پیچهای M4 یا M5 برای ثابت کردن استفاده کنید (ابعاد سوراخهای نصب در دفترچه مشخص است). حداقل فضای تهویه: 50mm از بالا و پایین، 30mm از چپ و راست (برای مدلهای کوچک؛ برای بزرگترها بیشتر).
- اتصال به زمین: ترمینال E (زمین) را به سیستم زمین با مقاومت کمتر از 100Ω متصل کنید تا از شوک الکتریکی جلوگیری شود.
- سیمکشی اولیه: کابلهای قدرت (ورودی R/L1, S/L2, T/L3 و خروجی U/T1, V/T2, W/T3) را با کابلهای استاندارد (AWG 14-2 بر اساس توان) وصل کنید. از کابلهای شیلددار برای کنترل استفاده کنید تا نویز کاهش یابد. حداکثر طول کابل موتور: 50-100 متر (با فیلتر اگر لازم).
- اتصال کیپد: کیپد JNEP-36 را به پورت RJ-11 یا RS485 وصل کنید. برای نصب ریموت، کابل تا 10 متر مجاز است.
- تست اولیه: برق را وصل کنید و LED “CHARGE” را چک کنید (باید خاموش شود پس از 5 دقیقه). بدون بار، اتوتیون را اجرا کنید.
فضای تهویه و نصب
برای جلوگیری از خطای OH (Over Heat)، فضای کافی برای جریان هوا فراهم کنید.
- مدلهای کوچک (0.75-5.5kW): 120mm از بالا، 50mm از پایین، 30mm از طرفین.
- مدلهای بزرگ (بالای 7.5kW): 200mm از بالا، 100mm از پایین، 50mm از طرفین.
- اگر در تابلو نصب میکنید، فن خنککننده اضافی نصب کنید و دما را زیر 45 درجه نگه دارید.
هشدار: تست ولتاژ بالا (withstand voltage test) روی درایو انجام ندهید. خروجی U/T1, V/T2, W/T3 را به منبع AC وصل نکنید.
نکات نصب و ملاحظات فیزیکی
-
فضای تهویه: حداقل 10 سانتیمتر فاصله از بالا، پایین، و اطراف درایو برای خنکسازی و جلوگیری از گرمای بیش از حد (OH) نگه دارید.
-
نصب عمودی: درایو باید بهصورت عمودی نصب شود تا جریان هوای فن بهینه باشد.
-
محیط کاری: دمای محیط 0 تا 40 درجه سانتیگراد (برای دمای بالاتر، از فن اضافی استفاده کنید). رطوبت حداکثر 90% بدون چگالش.
-
اتصال زمین: ترمینال زمین (E) را به سیستم زمین با مقاومت کمتر از 100 اهم متصل کنید.
-
نصب کیپد ریموت: اگر JNEP-36 را جداگانه نصب میکنید، از کابل شیلددار استفاده کنید تا نویز الکتریکی کاهش یابد.
-
ابعاد تابلو: برای مدلهای بزرگتر (بالای 15 kW)، تابلو با عمق حداقل 30 سانتیمتر و فضای کافی برای مقاومت ترمز طراحی کنید.
⚡ انواع ورودی برق:
| نوع ورودی | توان پشتیبانیشده |
|---|---|
| تکفاز 230 ولت | 0.75 تا 2.2 کیلووات |
| سهفاز 230 ولت | 0.75 تا 30 کیلووات |
| سهفاز 460 ولت | 0.75 تا 55 کیلووات |
🛠 مدار قدرت و کنترل:
برای درایوهای کوچک (0.75 تا 1.5 کیلووات):
- 8 ورودی دیجیتال
- 3 ورودی آنالوگ
- 2 خروجی دیجیتال ترانزیستوری
- 1 خروجی رلهای
- ورودی انکودر
- 1 پورت RS485
- 2 خروجی آنالوگ
برای درایوهای بزرگتر (2.2 تا 55 کیلووات):
- مشابه بالا با 2 خروجی رلهای
نکته:
- برای درایوهای بالاتر از 15 کیلووات، از واحد ترمز الکترومارکت بین ترمینالهای DC Bus (+ و -) استفاده شود.
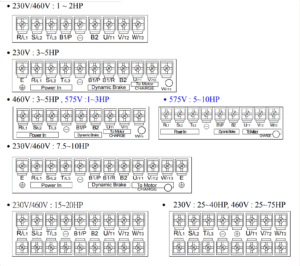
🛠️ راهنمای سیمکشی و اتصالات ترمینال قدرت درایو Teco MA7200
سیمکشی صحیح درایو Teco MA7200 برای عملکرد ایمن و بهینه ضروری است. این بخش شامل توضیحات ترمینالهای قدرت، کنترل، و نکات ایمنی سیمکشی است. برای جلوگیری از خطاها، همیشه از کابلهای استاندارد و اتصال زمین مناسب استفاده کنید.
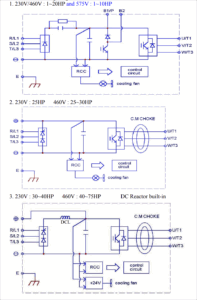
ترمینالهای قدرت (Main Circuit Terminals)
- R/L1, S/L2, T/L3: ورودیهای منبع تغذیه (تکفاز یا سهفاز بسته به مدل). برای مدلهای تکفاز 230V، فقط R/L1 و S/L2 استفاده شود.
- U/T1, V/T2, W/T3: خروجیهای موتور. موتور آسنکرون را به این ترمینالها متصل کنید.
- B1, B2: ترمینالهای مقاومت ترمز خارجی (برای مدلهای بالای 15kW ضروری). از مقاومت ترمز مناسب برای جلوگیری از اضافهولتاژ استفاده کنید.
- + (P), – (N): ترمینالهای DC Bus برای اتصال واحد ترمز یا باتری خارجی.
- E (زمین): ترمینال زمین. همیشه به زمین سایت با مقاومت کمتر از 100Ω متصل کنید تا از شوک الکتریکی جلوگیری شود.
تصویر زیر پیکربندی ترمینالهای درایو Teco MA7200 را نشان میدهد که چیدمان فیزیکی ترمینالهای قدرت و کنترل را مشخص میکند.
ترمینالهای کنترل (Control Circuit Terminals)
- ورودیهای دیجیتال (DI1 تا DI8): برای فرمانهای خارجی مانند استارت/استاپ، انتخاب سرعت (با استفاده از Sn-25 تا Sn-28).
- ورودیهای آنالوگ (AI1, AI2, AI3): برای تنظیم سرعت یا PID (ولتاژ 0-10V یا جریان 4-20mA).
- خروجیهای دیجیتال (DO1, DO2): ترانزیستوری برای سیگنالهای وضعیت (مانند Run یا Fault).
- خروجیهای رلهای (RA, RB, RC): برای اعلام فالت یا رسیدن به سرعت.
- RS485 (S+, S-): برای ارتباط سریال (Modbus RTU).
- انکودر (PG A, PG B): برای کنترل Closed Loop.
نکات سیمکشی عملی
- قبل از سیمکشی، درایو را خاموش کنید و حداقل 5 دقیقه صبر کنید تا خازنها تخلیه شوند.
- از کابلهای شیلددار برای سیگنالهای کنترل استفاده کنید تا نویز کاهش یابد.
- حداکثر طول سیم موتور: 50 متر برای مدلهای کوچک، 100 متر برای بزرگتر (با فیلتر نویز اگر لازم).
- برای مدلهای 230V/460V، سیمکشی سهفاز را بررسی کنید تا فازها درست باشند.
📌 اگر با نحوه انتخاب مقاومت ترمز در سیستمهای درایو آشنایی ندارید، پیشنهاد میکنیم مقاله “راهنمای جامع انتخاب مقاومت ترمز” را مطالعه کنید.
🖥️ راهنمای جامع کیپد (JNEP-36) درایو Teco MA7200
کیپد JNEP-36 رابط اصلی کاربر با درایو Teco MA7200 است که برای تنظیم پارامترها، کنترل موتور، و مشاهده وضعیت درایو استفاده میشود. این بخش به شما کمک میکند تا با عملکرد کلیدها، نمایشگر، و نحوه استفاده از کیپد آشنا شوید.
مشخصات کیپد JNEP-36
-
نمایشگر: LCD دوخطی، نمایش پارامترها، وضعیت، و مقادیر درایو.
-
کلیدها: 10 کلید برای کنترل و تنظیمات.
-
چراغهای LED: 5 عدد (RUN, STOP, FWD, REV, PRGM) برای نمایش وضعیت عملیاتی.
-
پورت ارتباطی: قابلیت اتصال به درایو از طریق کابل استاندارد.
-
مدهای کاری:
-
PRGM Mode: برای تنظیم و ویرایش پارامترها (حرکت موتور غیرفعال).
-
DRIVE Mode: برای اجرای دستورات و کنترل موتور.
-
نقشه کلیدها و عملکرد آنها
|
کلید |
عملکرد |
توضیحات |
|---|---|---|
|
PRGM/DRIVE |
تغییر بین مد PRGM و DRIVE |
با فشار این کلید، بین حالت تنظیم پارامترها (PRGM) و کنترل موتور (DRIVE) جابهجا میشوید. |
|
DSPL |
انتخاب گروه پارامتر |
در مد PRGM، برای جابهجایی بین گروههای پارامتر (An, Bn, Cn, Sn, Un) استفاده میشود. |
|
ENTER/EDIT |
ورود به ویرایش یا ذخیره |
برای ویرایش مقدار پارامتر فشار دهید؛ پس از تغییر، دوباره فشار دهید تا ذخیره شود (پیغام “Entry Accepted” نمایش داده میشود). |
|
UP (↑) |
افزایش مقدار یا انتخاب پارامتر |
برای افزایش مقدار پارامتر یا حرکت به پارامتر بعدی در مد PRGM؛ در مد DRIVE برای افزایش سرعت استفاده میشود (اگر Sn-09=1). |
|
DOWN (↓) |
کاهش مقدار یا انتخاب پارامتر |
برای کاهش مقدار پارامتر یا حرکت به پارامتر قبلی در مد PRGM؛ در مد DRIVE برای کاهش سرعت استفاده میشود. |
|
FWD/REV |
تغییر جهت چرخش |
در مد DRIVE و حالت Local، جهت چرخش موتور (چپگرد یا راستگرد) را تغییر میدهد (Sn-08=0 برای فعال بودن چپگرد). |
|
RUN |
شروع حرکت موتور |
در مد DRIVE و حالت Local، موتور را استارت میکند. در حالت Remote غیرفعال است. |
|
STOP |
توقف موتور |
موتور را متوقف میکند. با تنظیم Sn-07=0 همیشه فعال است؛ با Sn-07=1 فقط از ترمینال یا RS485 عمل میکند. |
|
JOG |
اجرای سرعت JOG |
در مد DRIVE، موتور را با سرعت JOG (An-17، پیشفرض 6Hz) اجرا میکند. |
|
RESET |
ریست خطاها یا بازگشت |
برای ریست خطاها یا خروج از ویرایش پارامتر بدون ذخیره استفاده میشود. |
نحوه کار با کیپد
1. تغییر بین مدهای PRGM و DRIVE
-
کلید PRGM/DRIVE را فشار دهید تا بین حالت تنظیم پارامترها (PRGM) و کنترل موتور (DRIVE) جابهجا شوید.
-
در مد PRGM، نمایشگر گروه پارامترها (مانند An-01) را نشان میدهد.
-
در مد DRIVE، نمایشگر وضعیت عملیاتی (مانند فرکانس، جریان، یا سرعت) را نشان میدهد (Bn-12 و Bn-13 برای تنظیم نمایش).
2. تنظیم پارامترها
-
به مد PRGM بروید (کلید PRGM/DRIVE).
-
با کلید DSPL، گروه پارامتر موردنظر (An, Bn, Cn, Sn) را انتخاب کنید.
-
با کلیدهای UP/DOWN به پارامتر خاص (مانند Cn-01) بروید.
-
کلید ENTER/EDIT را فشار دهید تا وارد حالت ویرایش شوید.
-
مقدار را با UP/DOWN تنظیم کنید.
-
دوباره ENTER/EDIT را فشار دهید تا مقدار ذخیره شود (پیغام “Entry Accepted”).
-
برای خروج بدون ذخیره، کلید RESET را فشار دهید.
3. کنترل موتور در حالت Local
-
در مد DRIVE، حالت Local را فعال کنید (ترکیب کلیدهای JOG + RESET برای جابهجایی بین Local و Remote).
-
از کلید RUN برای استارت، STOP برای توقف، و FWD/REV برای تغییر جهت استفاده کنید.
-
برای اجرای سرعت JOG، کلید JOG را فشار دهید (فرکانس از An-17 خوانده میشود).
4. نمایشگر و چراغهای LED
-
خط اول نمایشگر: متغیر اصلی (مانند فرکانس خروجی، تنظیمشده با Bn-12).
-
خط دوم نمایشگر: متغیر ثانویه (مانند جریان یا ولتاژ، تنظیمشده با Bn-13).
-
چراغهای LED:
-
RUN: روشن در حالت حرکت موتور.
-
STOP: روشن در حالت توقف.
-
FWD/REV: نشاندهنده جهت چرخش (راستگرد یا چپگرد).
-
PRGM: روشن در مد PRGM.
-
نکات کاربردی
-
حالت Remote یا Local: برای تغییر بین کنترل از کیپد (Local) و ترمینالها/RS485 (Remote)، کلیدهای JOG + RESET را فشار دهید.
-
تنظیم سرعت با کیپد: اگر Sn-09=1 باشد، کلیدهای UP/DOWN مستقیماً سرعت را در مد DRIVE تغییر میدهند.
-
قفل کیپد: برای جلوگیری از تغییرات ناخواسته، از Sn-03 برای قفل پارامترها استفاده کنید.
-
خواندن خطاها: در صورت بروز خطا، کد خطا روی نمایشگر ظاهر میشود (مانند OC یا OV). با RESET خطا را ریست کنید.
-
مانیتورینگ: از پارامترهای Un-01 تا Un-12 برای مشاهده اطلاعات لحظهای (ولتاژ، جریان، فرکانس) استفاده کنید.
⚙️ عملکرد در مدهای مختلف:
| مد | عملکرد |
|---|---|
| PRGM | مشاهده و ویرایش پارامترها (حرکت امکانپذیر نیست) |
| DRIVE | اجرای فرمان و عملکرد موتور |
- تغییر بین دو مد با کلید PRGM/DRIVE
- حرکت محلی از طریق کیپد در حالت Local
- کنترل از راه دور (ترمینالها یا RS485) در حالت Remote
- جابجایی بین Local و Remote با کلیدهای JOG + RESET
🔄 تغییر جهت و سرعت:
- کلیدهای FWD/REV برای تغییر جهت
- استفاده از کلیدهای جهت بالا/پایین برای تنظیم پارامترها
🗂️ گروه پارامترها:
| گروه | توضیح |
|---|---|
| An- | فرکانسهای ثابت و JOG |
| Bn- | زمانهای شتاب، تنظیم آنالوگ، PID |
| Cn- | پارامترهای موتور، ترمز، منحنی V/F، حفاظتها |
| Sn- | ورودی/خروجی دیجیتال، انتخاب مرجع فرمان و سرعت |
📊 مثال از پارامترهای پرکاربرد TECO MA7200:
گروه An (فرکانسهای ثابت):
- An-01 تا An-16: فرکانسهای ثابت (پیشفرض: 0 Hz)
- An-17: فرکانس JOG (پیشفرض: 6 Hz)
گروه Bn (تنظیمات اصلی و PID):
- Bn-01 تا Bn-04: زمانهای شتاب و کاهش سرعت
- Bn-05 تا Bn-08: ضرایب و بایاس ورودی آنالوگ
- Bn-12: متغیر نمایشی خط اول کیپد
- Bn-13: متغیر نمایشی خط دوم کیپد
- Bn-14 تا Bn-20: تنظیمات خروجی آنالوگ و PID
🛡️ کنترل پیشرفته PID و Vector Control در درایو Teco MA7200
این کنترلها برای کاربردهای دقیق مانند پمپ و فن مفید هستند.
کنترل PID
- فعالسازی: Bn-14 تا Bn-20 را تنظیم کنید (Kp, Ki, Kd).
- مثال: برای کنترل فشار، ورودی آنالوگ (AI1) را به سنسور متصل کنید و Sn-64=1.
- مزایا: پایداری سرعت/فشار، کاهش نوسان.
Vector Control
- فعالسازی: Sn-67=1 (بدون سنسور) یا با انکودر برای Closed Loop.
- تنظیمات: Cn-47 تا Cn-52 (ضرایب ASR).
- مزایا: گشتاور بالا در سرعت پایین، دقت بهتر از V/F.
برای تنظیم دقیق، از اتوتیون استفاده کنید.
🔍 تغییر پارامترهای TECO MA7200:
- در حالت PRGM باشید.
- کلید PRGM/DRIVE را فشار دهید.
- با کلید DSPL به گروه مدنظر بروید.
- کلید Enter/Edit را برای ویرایش فشار دهید.
- مقدار جدید را وارد و با Enter ذخیره کنید.
- پیغام Entry Accepted ظاهر میشود.
گروه پارامترهای Cn (کنترل اصلی و موتور)
| پارامتر | پیشفرض | توضیح |
|---|---|---|
| Cn-01 | 400V | ولتاژ ورودی درایو (تکفاز یا سهفاز) |
| Cn-02 | 60Hz | حداکثر فرکانس خروجی درایو |
| Cn-03 | 400V | حداکثر ولتاژ خروجی درایو |
| Cn-04 | 60Hz | فرکانس در حداکثر ولتاژ |
| Cn-05 | 3.0Hz | فرکانس نقطه میانی منحنی V/F |
| Cn-06 | 31V | ولتاژ نقطه میانی منحنی V/F |
| Cn-07 | 1.5Hz | حداقل فرکانس منحنی V/F |
| Cn-08 | 16V | حداقل ولتاژ منحنی V/F |
| Cn-09 | از پلاک موتور | جریان نامی موتور |
| Cn-10 | 30% | جریان بیباری موتور |
| Cn-11 | از پلاک موتور | درصد لغزش موتور |
| Cn-12 | – | مقاومت استاتور (توسط اتوتیون) |
| Cn-14 | 1.5Hz | فرکانس شروع تزریق جریان DC |
| Cn-15 | 50% | مقدار جریان تزریق برای ترمز DC |
| Cn-16 | 0.5s | مدت زمان تزریق DC در توقف |
| Cn-17 | 0s | مدت زمان تزریق DC در استارت |
| Cn-18 | 100% | حد بالای فرکانس خروجی |
| Cn-19 | 0% | حد پایین فرکانس خروجی |
| Cn-20 تا Cn-22 | 0Hz | فرکانسهای پرش (3 عدد) |
| Cn-23 | 1Hz | پهنای باند فرکانسهای پرش |
| Cn-24 | تعداد ریاستارت اتوماتیک پس از فالت | |
| Cn-25 | 170% | جریان در زمان شتاب برای جلوگیری از استال |
| Cn-26 | 160% | جریان در کار عادی برای جلوگیری از استال |
| Cn-29 | 0Hz | مقدار سرعت هنگام رسیدن در شتاب مثبت |
| Cn-30 | 0Hz | مقدار سرعت هنگام کاهش سرعت |
| Cn-31 | 2Hz | پهنای باند Speed Reach |
| Cn-32 | 160% | حداکثر گشتاور خروجی |
| Cn-33 | 0.1s | تاخیر در اعلام اضافه گشتاور |
| Cn-34 | 6kHz | فرکانس سوئیچینگ IGBT |
| Cn-40 | – | ولتاژ پایین اعلام هشدار |
| Cn-41 تا Cn-44 | 0s | زمانهای شتاب و کاهش سرعت در S-Curve |
| Cn-45 | از پلاک | تعداد پالس انکودر |
| Cn-46 | 4P | تعداد قطبهای موتور |
| Cn-47 تا Cn-52 | متغیر | ضرایب تناسبی و انتگرالی کنترلر سرعت (ASR) |
| Cn-53 | 10% | حد بالای انحراف سرعت |
| Cn-54 | 110% | حد اضافه سرعت |
| Cn-57 تا Cn-61 | – | پارامترهای موتور (محاسبهشده توسط Auto-Tune) |
📌 اگر به دنبال درک عمیقتری از نحوه عملکرد و انتخاب مقاومت ترمز اینورتر هستید، مطالعه مقاله “تحلیل جامع مقاومت ترمز اینورتر: از محاسبات تا انتخاب بهینه” را از دست ندهید.
🔌 جدول انتخاب مقاومت ترمز برای درایو Teco MA7200
جدول زیر مقاومت و توان پیشنهادی برای مدلهای مختلف را نشان میدهد. برای مدلهای بالای 20HP، واحد ترمز خارجی (مانند TECO Braking Unit) اضافه کنید.
| ولتاژ / توان (HP / kW) | مقاومت پیشنهادی (Ω) | توان مقاومت (W) | درصد وظیفه ترمز (ED%) | توضیحات |
|---|---|---|---|---|
| 230V / 1HP (0.75kW) | 100-150 | 100-200 | 5-10% | داخلی؛ برای ترمز سبک (B1/P به B2) |
| 230V / 2HP (1.5kW) | 80-120 | 200-400 | 10% | داخلی؛ مناسب آسانسور کوچک |
| 230V / 3-5HP (2.2-3.7kW) | 50-100 | 400-800 | 10-15% | داخلی؛ برای 7200MA-2003/2005-N1 |
| 230V / 7.5-10HP (5.5-7.5kW) | 30-50 | 800-1200 | 15-20% | داخلی؛ بررسی Cn-15 (جریان ترمز 50%) |
| 230V / 15-20HP (11-15kW) | 20-30 | 1200-2000 | 20% | داخلی/خارجی؛ برای مدلهای NEMA4 |
| 230V / 25-30HP (18.5-22kW) | 15-20 | 2000-3000 + واحد ترمز | 20-30% | واحد ترمز خارجی (B-P0)؛ برای بالای 20HP |
| 230V / 40HP (30kW) | 10-15 | 3000+ + واحد ترمز | 30% | واحد ترمز + مقاومت موازی |
| 460V / 1-3HP (0.75-2.2kW) | 200-300 | 200-400 | 5-10% | داخلی؛ Vpnb=380V DC |
| 460V / 5-10HP (3.7-7.5kW) | 100-200 | 400-1000 | 10-15% | داخلی؛ برای 7200MA-4005/4010-N1 |
| 460V / 15-20HP (11-15kW) | 50-100 | 1000-2000 | 15-20% | داخلی/خارجی |
| 460V / 30-50HP (22-37kW) | 30-50 | 2000-4000 + واحد ترمز | 20-30% | واحد ترمز خارجی لازم |
| 460V / 75HP (55kW) | 20-30 | 4000+ + واحد ترمز | 30-50% | چند مقاومت موازی + واحد ترمز |
نکات انتخاب و نصب مقاومت ترمز
- فرمول محاسبه: توان W = (Vpnb² * ED%) / Rmin؛ Vpnb=220V برای 230V کلاس، 380V برای 460V کلاس. ED% بر اساس زمان ترمز (معمولاً 10-20% برای آسانسور).
- اتصال: برای داخلی: B1/P به B2. برای خارجی: ⊕/- درایو به واحد ترمز، سپس B-P0 واحد به مقاومت.
- حفاظت: Sn-15=1 (فعالسازی ترمز خارجی)، Sn-65=1 (حفاظت ترمز). اگر خطای BRF رخ داد، مقاومت را چک کنید.
- پیشنهاد: از مقاومتهای UL-listed (مانند JNBR-400W150 برای مدلهای کوچک) استفاده کنید.
🛠 گروه پارامترهای Sn (تنظیمات فرمان و عملکرد)
| پارامتر | پیشفرض | توضیح |
|---|---|---|
| Sn-01 | – | توان درایو (ظرفیت) |
| Sn-02 | – | انتخاب منحنی V/F از بین 00 تا 15 |
| Sn-03 | – | بازگشت به تنظیمات کارخانه، قفل پارامترها، پاککردن فالتها |
| Sn-04 | 0 = Keypad | مرجع فرمان درایو (کیپد، دیجیتال، RS485) |
| Sn-05 | 0 = Keypad | مرجع سرعت (ورودی دیجیتال، آنالوگ، پالس، سریال) |
| Sn-25 تا Sn-28 | – | تنظیمات ورودی دیجیتال برای انتخاب سرعت ثابت |
⚙️ راهنمای اتوتیون (Auto-Tune) در درایو Teco MA7200
اتوتیون برای تنظیم خودکار پارامترهای موتور (مانند مقاومت استاتور) ضروری است و عملکرد را بهینه میکند.
- موتور را بدون بار متصل کنید (بار را قطع کنید).
- پارامتر Sn-66 را روی 1 (فعال) تنظیم کنید.
- اطلاعات پلاک موتور (Cn-09, Cn-11, Cn-46) را وارد کنید.
- درایو را استارت کنید؛ اتوتیون حدود 1-2 دقیقه طول میکشد.
- پس از اتمام، پارامترها (Cn-12, Cn-57 تا Cn-61) بهروزرسانی میشوند.
نکته ایمنی: در حین اتوتیون، موتور ممکن است بچرخد؛ اطراف را خالی کنید.
📎 نکات مهم برای تنظیمات دستی و بازیابی:
- برای بازگشت به تنظیمات کارخانه:
- مقدار مناسب (7 تا 12) را بر اساس ولتاژ و سیمبندی وارد کنید.
- مثال: مقدار 11 برای ورودی 380V / سیمبندی 2-wire.
- برای انتخاب سرعت از طریق ترمینالها، از Sn-25 تا Sn-28 استفاده کرده و مقدار Sn-05 را روی حالت مناسب قرار دهید.
- در صورتی که نیاز به طراحی منحنی V/F خاص دارید، Sn-02 را روی 15 تنظیم و سپس از Cn-05 تا Cn-08 مقداردهی کنید.
🧠 خلاصه تنظیمات و عملکرد پارامترهای کلیدی درایو Teco MA7200
⚙️ کنترل حرکت و توقف
Sn-06: روش توقف موتور0 = Ramp(توقف نرم)1 = Coast to stop(توقف آزاد)
Sn-07: فعال یا غیرفعال بودن دکمه توقف روی کیپد0 = همیشه فعال1 = فقط از طریق ترمینال ورودی یا RS485
Sn-08: اجازه حرکت در جهت معکوس (چپگرد)0 = مجاز
Sn-09: نحوه تنظیم سرعت با کلیدهای Up/Down0 = همراه با Enter1 = فقط Up/Down
🛡️ حفاظتها و ایمنی
Sn-14: حفاظت در برابر جریان استال (Stall current) –1 = فعالSn-15: فعالسازی مقاومت ترمز خارجی –1 = فعالSn-16: حفاظت استال در زمان کاهش سرعت –1 = فعالSn-22: عملکرد در برابر خطای خارجی –1 = توقف آزادSn-23: حفاظت حرارتی اضافهبار موتور –1 = فعالSn-65: حفاظت از مقاومت ترمز –0 = غیرفعال
🔌 ورودیها و خروجیها
- ورودیهای دیجیتال (Sn-25 تا Sn-28):
Sn-25 = 02: انتخاب سرعت 1Sn-26 = 03: انتخاب سرعت 2Sn-27 = 06: Jog (سرعت کم)Sn-28: تنظیمات بیشتر در صورت نیاز
- خروجیها:
Sn-30 = 13: رله خروجی برای فالتSn-31 = 00: Digital Output 1 = RunSn-32 = 01: Digital Output 2 = Zero SpeedSn-33/34: خروجیهای آنالوگ
🔄 کنترل و مد کاری
Sn-04 = 1: فرمان از ورودی دیجیتالSn-05 = 0: استفاده از سرعتهای ثابت An-01 تا An-16Sn-67 = 1: مد کنترلی برداری بدون سنسور (Vector control)Sn-66 = 1: اتوتیون فعالSn-64 = 0: کنترل PID غیرفعال
📈 پارامترهای سرعت و شتاب
An-01: سرعت پیادهروی = 6HzAn-02: سرعت اصلی آسانسور = 50HzAn-03: سرعت رویزیون = 15HzAn-17: Jog Speed = 5HzBn-01: شتاب = 4sBn-02: کاهش سرعت = 3s
⚡ پارامترهای V/F و توان
Cn-01: ولتاژ ورودی = 380VCn-02: حداکثر فرکانس خروجی = 60HzCn-03تاCn-08: منحنی V/F مطابق با موتورCn-14تاCn-17: پارامترهای ترمز DCCn-32: گشتاور خروجی حداکثر = 120%Cn-33: تأخیر اعلام اضافه بار = 8sCn-34: فرکانس کلیدزنی IGBT = 4kHz
📊 مانیتورینگ و پارامترهای فقط خواندنی
Un-01تاUn-12: ولتاژ، جریان، فرکانس، وضعیت ترمینالها- فقط نمایش اطلاعات داخلی درایو، قابل ویرایش نیستند.
📋 نکته ویژه برای استفاده در آسانسور
- استفاده از سرعتهای ثابت (An-01 تا An-03) برای دور کند، تند، رویزیون
- تنظیم مقاومت ترمز و حفاظتها حتماً فعال باشد
- استفاده از Vector Control بدون سنسور توصیه میشود (
Sn-67 = 1) - فرمان حرکت از ورودی دیجیتال، نه کیپد (
Sn-04 = 1,Sn-07 = 1)
🛠️ کاربردهای خاص درایو Teco MA7200
تنظیمات پیشنهادی برای کاربردهای مختلف.
| کاربرد | پارامترهای پیشنهادی |
|---|---|
| پمپ | PID فعال (Bn-14=1)، سرعت حداقل 20Hz (Cn-19=20)، حفاظت خشک (Sn-23=1) |
| فن/تهویه | Vector Control (Sn-67=1)، شتاب نرم (Bn-01=10s)، فرکانس سوئیچینگ پایین (Cn-34=4kHz) |
| نوار نقاله | ترمز DC (Cn-15=50%)، سرعت ثابت (An-01=30Hz)، ریاستارت اتوماتیک (Cn-24=3) |
🔍 کدهای خطا و عیبیابی درایو Teco MA7200
این بخش شامل تمامی کدهای خطای رایج درایو Teco MA7200، توضیحات، علل احتمالی، و راهحلهای پیشنهادی برای رفع آنها است. قبل از هر اقدامی، منبع تغذیه را قطع کنید و ایمنی را رعایت کنید.
| راهحل پیشنهادی | علل احتمالی | توضیح | کد خطا |
|---|---|---|---|
| زمان شتاب را افزایش دهید (Bn-01)، بار را کاهش دهید، سیمکشی موتور را بررسی کنید، موتور را تست کنید. | بار سنگین، شتاب خیلی سریع، اتصال کوتاه در خروجی، خرابی موتور | اضافه جریان (Over Current) | OC |
| Bn-01 را افزایش دهید، گشتاور را بررسی کنید (Cn-25=170%)، بار را چک کنید. | شتاب خیلی سریع، تنظیمات گشتاور نادرست | اضافه جریان در شتاب | OC-A |
| بار را کاهش دهید، موتور را برای اتصال کوتاه تست کنید، حفاظت استال را فعال کنید (Sn-14=1). | بار بیش از حد، نقص در موتور | اضافه جریان در سرعت ثابت | OC-C |
| زمان کاهش سرعت را افزایش دهید (Bn-02)، مقاومت ترمز را چک کنید (Sn-15=1). | کاهش سرعت سریع، مقاومت ترمز نامناسب | اضافه جریان در کاهش سرعت | OC-D |
| مقاومت ترمز نصب کنید (Sn-15=1)، زمان کاهش سرعت را افزایش دهید (Bn-02)، ولتاژ ورودی را بررسی کنید (Cn-01). | کاهش سرعت سریع، مقاومت ترمز غایب یا نامناسب، ولتاژ ورودی بالا | اضافه ولتاژ (Over Voltage) | OV |
| ولتاژ ورودی را بررسی کنید، کابلها را کوتاه کنید، پارامتر Cn-40 را تنظیم کنید. | ولتاژ ورودی پایین، کابل بلند، منبع تغذیه ناپایدار | کمبود ولتاژ (Under Voltage) | UV |
| تهویه را بهبود دهید، فن را چک کنید، بار را کاهش دهید، دمای محیط را کنترل کنید. | تهویه ضعیف، فن خراب، بار مداوم بالا، دمای محیط بالا | گرمای بیش از حد (Over Heat) | OH |
| بار را کاهش دهید، حفاظت اضافهبار را فعال کنید (Sn-23=1)، جریان نامی موتور را بررسی کنید (Cn-09). | بار بیش از ظرفیت موتور، تنظیمات حفاظت نادرست | اضافهبار (Over Load) | OL |
| جریان نامی موتور (Cn-09) و حفاظت اضافهبار (Sn-23) را بررسی کنید، بار را کاهش دهید. | کار مداوم در بار بالا، تنظیمات نادرست موتور | اضافهبار موتور | OL1 |
| ظرفیت درایو را با بار تطبیق دهید، دمای محیط را کاهش دهید. | بار بیش از ظرفیت درایو، دمای بالا | اضافهبار درایو | OL2 |
| عایقبندی کابلها و موتور را بررسی کنید، ترمینال زمین (E) را چک کنید. | نشتی جریان به زمین، عایقبندی ضعیف، موتور معیوب | خطای اتصال به زمین (Ground Fault) | GF |
| کابلهای خروجی (U/T1, V/T2, W/T3) را بررسی کنید، موتور را تست کنید. | اتصال کوتاه در خروجی، خرابی موتور یا کابل | اتصال کوتاه (Short Circuit) | SC |
| اتصالات ورودی (R/L1, S/L2, T/L3) را بررسی کنید، ولتاژ منبع را تثبیت کنید. | فاز گمشده، ولتاژ ورودی ناپایدار | خطای منبع تغذیه (Power Fault) | PF |
| درایو را ریست کنید (Sn-03)، کابلهای شیلددار برای کنترل استفاده کنید، اگر ادامه داشت با پشتیبانی تماس بگیرید. | نقص در پردازنده داخلی، نویز الکتریکی | خطای CPU | CF |
| به تنظیمات کارخانه بازگردید (Sn-03=7-12)، اگر مشکل ادامه داشت، درایو را برای تعمیر ارسال کنید. | مشکل در ذخیرهسازی پارامترها | خطای حافظه EEPROM | EE |
| کابلهای RS485 (S+, S-) را بررسی کنید، نرخ باود و آدرس را تنظیم کنید، از کابل شیلددار استفاده کنید. | مشکل در RS485، نرخ باود نادرست، نویز | خطای ارتباطی (Communication Error) | CRC |
| ورودیهای دیجیتال (DI1-DI8) را بررسی کنید، تنظیمات Sn-22 را چک کنید. | سیگنال خطا از ورودی دیجیتال | خطای خارجی (External Fault) | EF |
| ولتاژ ورودی را بررسی کنید، اگر ادامه داشت درایو را برای تعمیر ارسال کنید. | منبع تغذیه ضعیف، خرابی خازنها | ولتاژ پایین DC Bus | LU |
| اتصالات PG A/B را بررسی کنید، تنظیمات انکودر (Cn-45) را چک کنید. | اتصال نادرست انکودر، خرابی انکودر | خطای انکودر (PG Feedback Error) | PGF |
| حد اضافه سرعت (Cn-54) را بررسی کنید، تنظیمات انکودر یا Vector Control (Sn-67) را چک کنید. | سرعت موتور بیش از حد مجاز، تنظیمات نادرست | اضافه سرعت (Over Speed) | OS |
| تنظیمات آدرس و نرخ باود را بررسی کنید، از نرمافزار TECO-Link استفاده کنید. | خطا در پروتکل ارتباطی | خطای مدباس (Modbus Error) | CE |
| تمام پارامترها را بررسی کنید، به تنظیمات کارخانه بازگردید (Sn-03). | تنظیمات پارامتر ناسازگار | خطای پارامتر خاص (Special Parameter Fault) | SPF |
| اتصالات U/T1, V/T2, W/T3 را بررسی کنید، موتور را تست کنید. | اتصال نادرست موتور، خرابی کابل خروجی | از دست دادن فاز خروجی | PHL |
| مقاومت ترمز (B1, B2) و تنظیمات Sn-15 را بررسی کنید. | مقاومت ترمز معیوب، اتصال نادرست | خطای مقاومت ترمز | BRF |
| ورودیهای STO را بررسی کنید، اگر غیرفعال است، تنظیمات را چک کنید. | فعال شدن حالت STO | توقف ایمن (Safe Torque Off) | STO |
نکات مهم:
- ریست خطا: برای رفع خطا، کلید RESET را فشار دهید یا از پارامتر Sn-03 استفاده کنید. اگر خطا تکرار شد، با الکترومارکت تماس بگیرید (۰۹۱۲۲۶۵۹۱۵۴).
- ایمنی: قبل از بررسی، منبع تغذیه را قطع کنید و ۵ دقیقه صبر کنید تا خازنها تخلیه شوند.
- لاگ خطاها: از پارامترهای Un-01 تا Un-12 برای مشاهده تاریخچه خطاها استفاده کنید.
❓ سوالات متداول (FAQ) درباره درایو Teco MA7200
- چرا درایو خطای OC میدهد؟ احتمالاً بار سنگین؛ زمان شتاب را افزایش دهید.
- چگونه منحنی V/F را تنظیم کنم؟ Sn-02=15 و سپس Cn-05 تا Cn-08 را ویرایش کنید.
- چه زمانی مقاومت ترمز لازم است؟ برای کاهش سرعت سریع در بارهای اینرسی بالا.
- آیا برای آسانسور مناسب است؟ بله، با Vector Control و سرعتهای ثابت.
الکترومارکت به عنوان یک منبع معتبر و تخصصی در حوزه تأمین تجهیزات اتوماسیون صنعتی، آماده ارائه خدمات جامع شما عزیزان است. ما به شما کمک میکنیم تا بهترین درایو را برای نیازهای خاص پروژه خود انتخاب کنید. خدمات ما شامل:
- مشاوره تخصصی رایگان: تیم مجرب مهندسان الکترومارکت آماده ارائه مشاورههای فنی دقیق برای انتخاب دقیقترین و مناسبترین درایو بر اساس مشخصات آسانسور شما هستند.
- تأمین و فروش: الکترومارکت تضمین میکند که شما درایو Yaskawa L1000Aاصلی و با کیفیت را با بهترین قیمت و در کوتاهترین زمان ممکن دریافت خواهید کرد.
- پشتیبانی فنی و خدمات پس از فروش: حتی پس از خرید، میتوانید روی پشتیبانی فنی و خدمات پس از فروش ما برای نصب، راهاندازی، عیبیابی و رفع مشکلات احتمالی حساب کنید.
- منابع آموزشی و مقالات تخصصی: برای گسترش دانش خود در زمینه درایوها، PLC ها، HMI ها و دیگر تجهیزات صنعتی، میتوانید به طور منظم به وبلاگ الکترومارکت سر بزنید و از مقالات آموزشی ما بهرهمند شوید.
 تماس با ما – الکترومارکت
تماس با ما – الکترومارکت الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست.
الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست. دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷
دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷  تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴
تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴ وبسایت:
وبسایت:  در دسترس برای مشاوره رایگان
در دسترس برای مشاوره رایگان