آموزش فارسی اینورتر LS S100 | تنظیم پارامترها، ترمینالها، کنترل دور و خطاها

- Version
- Download 23
- File Size 0.00 KB
- File Count 1
- Create Date 10 اردیبهشت, 1405
- Last Updated 11 اردیبهشت, 1405
| File | Action |
|---|---|
| LS S100 User Manual | Download |
اینورتر LS S100 یکی از پرکاربردترین درایوهای کنترل دور موتور در پروژههای صنعتی، تأسیساتی و اتوماسیون است که به دلیل ابعاد مناسب، امکانات کنترلی متنوع، پارامترهای کامل و قابلیت اطمینان بالا، در بسیاری از تابلوهای برق و سیستمهای کنترل موتور مورد استفاده قرار میگیرد. شناخت دقیق تنظیمات اینورتر LS S100، آشنایی با پارامترهای مهم، روش صحیح سیمکشی ترمینالهای قدرت و فرمان، نحوه تنظیم فرکانس و همچنین بررسی خطاها و عیبیابی، نقش بسیار مهمی در راهاندازی اصولی و بهرهبرداری مطمئن از این تجهیز دارد.
اگر قصد خرید اینورتر LS S100، بررسی مشخصات فنی، مقایسه مدلها، یا دریافت مشاوره تخصصی برای انتخاب و راهاندازی درایو مناسب پروژه خود را دارید، مطالعه این راهنما در کنار بررسی محصولات و خدمات تخصصی الکترومارکت میتواند به شما در انتخاب دقیقتر و اجرای مطمئنتر کمک کند.
سختافزار درایو ال اس S100
درایو S100 از نظر سختافزاری بهگونهای طراحی شده است که کاربر در زمان نصب، سیمکشی و راهاندازی، با ساختاری منظم و کاربردی مواجه باشد. این تجهیز با در اختیار قرار دادن ترمینالهای قدرت استاندارد، ورودیها و خروجیهای کنترلی متنوع و قابلیت اتصال تجهیزات جانبی، برای استفاده در کاربردهای مختلف صنعتی گزینهای قابل اتکا محسوب میشود.
ویژگیهای سختافزاری درایو ال اس S100
-
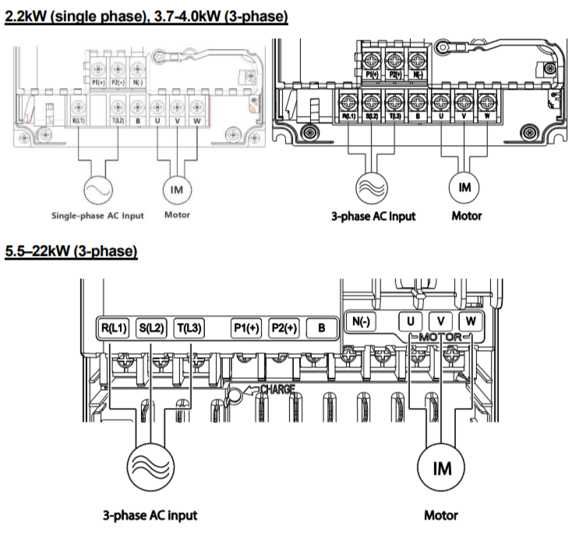
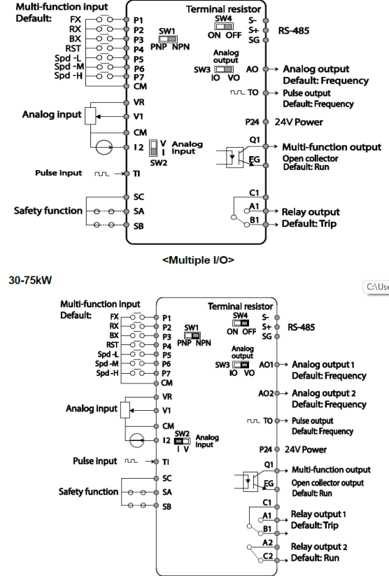
ترمینالهای ورودی برق و خروجی موتور: در بخش قدرت، ترمینالهای R، S، T برای اتصال منبع تغذیه ورودی در نظر گرفته شدهاند و ترمینالهای U، V، W به خروجی موتور اختصاص دارند. این ساختار باعث میشود اتصال درایو به شبکه و موتور با آرایش استاندارد و شناختهشده انجام شود و فرآیند نصب برای تکنسینها سادهتر باشد.
-
امکان اتصال مقاومت ترمز و یونیت ترمز: یکی از قابلیتهای مهم سختافزاری S100، امکان استفاده از تجهیزات ترمزی است. در این درایو میتوان از مقاومت ترمز برای کنترل بهتر انرژی برگشتی و کاهش زمان توقف استفاده کرد. همچنین امکان اتصال یونیت ترمز نیز در مدلهای مرتبط وجود دارد که این موضوع در کاربردهایی با توقفهای سریع یا بارهای اینرسیدار اهمیت زیادی پیدا میکند.
-
ورودیهای دیجیتال چندمنظوره:درایو S100 به ورودیهای دیجیتال قابل برنامهریزی مجهز است. این ورودیها میتوانند برای فرمانهای مختلف مانند اجرای حرکت، توقف، تغییر حالت عملکرد و دیگر دستورات کنترلی تنظیم شوند. چندمنظوره بودن این بخش باعث میشود اینورتر بتواند با شرایط کاری متنوع و منطق کنترلی مختلف هماهنگ شود.
-
پشتیبانی از ورودی آنالوگ ولتاژی و جریانی: این درایو از ورودی آنالوگ برای دریافت سیگنال مرجع پشتیبانی میکند و امکان کار با سیگنالهای ولتاژی یا جریانی را در اختیار کاربر قرار میدهد. این ویژگی برای اتصال تجهیزاتی مانند پتانسیومتر، PLC، کنترلرهای صنعتی و سنسورها بسیار مهم است و به کاربر کمک میکند کنترل دقیقتری روی سرعت یا فرمان مرجع داشته باشد.
- انعطافپذیری در تعریف عملکرد ورودیها :برخی ورودیهای کنترلی در S100 را میتوان برای عملکردهای خاصی مانند Trip یا Block تعریف کرد. این موضوع باعث میشود درایو در سیستمهایی که نیاز به حفاظتهای جانبی، توقفهای خاص یا محدودسازی عملکرد دارند، کارایی بالاتری از خود نشان دهد.
ترمینالهای قدرت اینورتر LS S100
ترمینالهای قدرت در اینورتر LS S100 برای اتصال برق ورودی، خروجی موتور، ارت، و در برخی مدلها تجهیزات جانبی مانند مقاومت ترمز استفاده میشوند. این بخش مستقیماً با توان اصلی درایو در ارتباط است و رعایت اصول سیمکشی در آن اهمیت بسیار زیادی دارد.
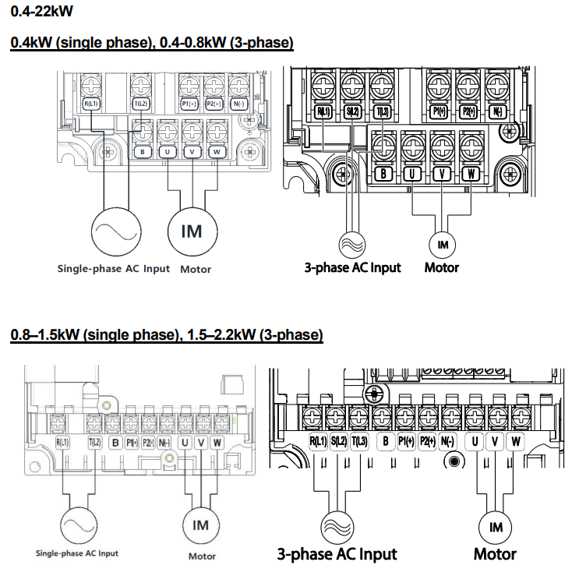
1) ترمینال ورودی برق اصلی
در این بخش، برق شبکه به اینورتر وارد میشود. بسته به مدل اینورتر، ورودی میتواند تکفاز یا سهفاز باشد. معمولاً این ترمینالها با نامهای R/L1، S/L2 و T/L3 یا در برخی مستندات با L1، L2 و L3 مشخص میشوند.
- در مدلهای سهفاز، هر سه ترمینال برای تغذیه اصلی استفاده میشوند.
- در مدلهای تکفاز، معمولاً فقط دو ترمینال ورودی به کار میروند.
- ولتاژ ورودی باید دقیقاً با رنج نامی اینورتر مطابقت داشته باشد؛ برای مثال برخی مدلها در بازه
و برخی دیگر در بازه 380–480VAC کار میکنند.
نکته مهم در سیمکشی اینورتر LS S100:ورودی برق نباید به ترمینالهای خروجی موتور متصل شود، زیرا این اشتباه میتواند باعث آسیب جدی به ماژول قدرت اینورتر شود.
2) ترمینال خروجی موتور
ترمینالهای خروجی موتور معمولاً با نامهای U، V و W مشخص میشوند. این سه ترمینال، خروجی سهفاز متغیر اینورتر هستند و مستقیماً به موتور متصل میشوند.
- اتصال صحیح این سه ترمینال برای راهاندازی موتور ضروری است.
- در صورتی که جهت چرخش موتور برعکس باشد، میتوان جای دو فاز خروجی را با هم عوض کرد.
- بهتر است بین اینورتر و موتور از کابل مناسب و شیلددار استفاده شود، مخصوصاً در مسیرهای بلند، تا نویز الکترومغناطیسی کاهش پیدا کند.
در بسیاری از پروژهها، کاربران هنگام سیمکشی خروجی اینورتر LS S100 باید به طول کابل، ارت مناسب، و تنظیمات فرکانس کریر توجه ویژه داشته باشند تا هم نویز کمتر شود و هم موتور عملکرد پایدارتری داشته باشد.
3) ترمینال ارت یا زمین
ترمینال ارت که معمولاً با PE یا G شناخته میشود، برای حفاظت الکتریکی و کاهش نویز به کار میرود. اتصال صحیح ارت در اینورتر LS S100 فقط یک توصیه نیست، بلکه یک الزام اجرایی مهم است.
مزایای اتصال صحیح ارت:
- افزایش ایمنی اپراتور و تجهیزات
- کاهش احتمال برقگرفتگی
- کاهش نویز الکتریکی در مدار فرمان
- بهبود عملکرد سیستم کنترل و تجهیزات جانبی
برای بهترین نتیجه، ارت اینورتر، ارت موتور و ارت تابلو باید با اصول استاندارد و با کمترین امپدانس ممکن اجرا شوند.
4) ترمینال مقاومت ترمز
در برخی کاربردها که موتور نیاز به توقف سریع دارد یا بار ماهیت ژنراتوری دارد، از مقاومت ترمز استفاده میشود. در این حالت، اینورتر ممکن است دارای ترمینالهای مخصوص اتصال یونیت ترمز یا مقاومت ترمز باشد.
 کاربردهای رایج این بخش:
کاربردهای رایج این بخش:
- توقف سریع موتور
- جلوگیری از خطای اضافه ولتاژ در زمان کاهش سرعت
- کنترل بهتر بارهای اینرسی بالا
- استفاده در بالابر، سانتریفیوژ، و تجهیزات با زمان توقف کوتاه
در صورت استفاده از مقاومت ترمز، باید مشخصات اهمی و توان آن کاملاً مطابق با دستورالعمل اینورتر انتخاب شود.
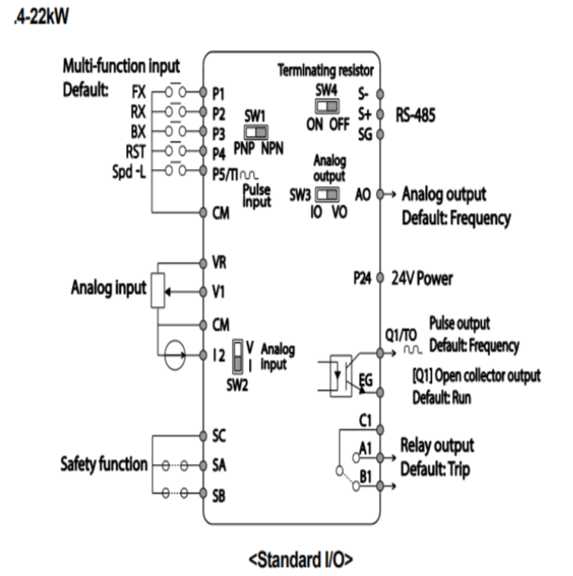
ترمینالهای فرمان اینورتر LS S100
ترمینالهای فرمان LS S100 برای کنترل عملکرد اینورتر از طریق شستی، PLC، سنسور، پتانسیومتر، سیستم اتوماسیون و تجهیزات جانبی استفاده میشوند. این ترمینالها نقش اصلی در اجرای فرامین استارت، استپ، تغییر جهت، انتخاب سرعت، ریست خطا، کنترل PID و مانیتورینگ وضعیت دستگاه دارند.
1) ورودیهای دیجیتال اینورتر LS S100
ورودیهای دیجیتال معمولاً برای دریافت فرمانهای قطع و وصل به کار میروند. این ورودیها قابل برنامهریزی هستند و میتوان برای هرکدام یک عملکرد خاص تعریف کرد.
کاربردهای متداول ورودی دیجیتال اینورتر LS S100:
- فرمان Run / Stop
- چرخش Forward / Reverse
- Jog
- Reset fault
- انتخاب سرعت چندمرحلهای
- فعالسازی Fire Mode
- انتخاب Local / Remote
- فرمان توقف آزاد یا توقف رمپدار
این ورودیها معمولاً از نوع چندمنظوره هستند و بسته به تنظیم پارامترها، رفتار آنها تغییر میکند. به همین دلیل، هنگام تنظیم ترمینال فرمان اینورتر S100 باید هم سیمکشی فیزیکی و هم پارامترهای مربوط به اختصاص عملکرد ورودیها بهدرستی بررسی شوند.
2) ورودیهای آنالوگ اینورتر LS S100
ورودی آنالوگ LS S100 برای دریافت سیگنالهای پیوسته و کنترل فرکانس مرجع استفاده میشود. این بخش معمولاً از سیگنالهای ولتاژی و جریانی پشتیبانی میکند؛ مانند:
کاربردهای اصلی:
- کنترل سرعت توسط پتانسیومتر
- دریافت فرمان سرعت از PLC
- کنترل فرآیند از طریق سنسور فشار، دما یا سطح
- استفاده در لوپ PID
در پروژههای صنعتی، سیمکشی ورودی آنالوگ اینورتر LS S100 باید با کابل مناسب و ترجیحاً شیلددار انجام شود تا نویز روی سیگنال مرجع تأثیر منفی نگذارد.
برای دریافت مشاوره جهت انتخاب سایز کابل مناسب میتوانید با الکترومارکت تماس بگیرید.
3) خروجیهای دیجیتال اینورتر LS S100
خروجیهای دیجیتال برای اعلام وضعیت اینورتر به تجهیزات بیرونی استفاده میشوند. این خروجیها میتوانند ترانزیستوری یا رلهای باشند و برای اطلاع از وضعیتهایی مانند Run، Fault، Alarm، At Frequency یا Ready به کار روند.
کاربردهای رایج خروجی دیجیتال اینورتر LS S100:
- اعلام روشن بودن موتور
- اعلام وقوع خطا
- ارسال آلارم به PLC
- صدور فرمان برای تجهیزات جانبی
- اطلاع از رسیدن به فرکانس مرجع
در بسیاری از تابلوهای صنعتی، این خروجیها مستقیماً به PLC یا رله واسط متصل میشوند.
4) خروجی آنالوگ اینورتر LS S100
خروجی آنالوگ برای مانیتور کردن یک پارامتر متغیر از اینورتر استفاده میشود. این خروجی میتواند اطلاعاتی مثل موارد زیر را به سیستم مانیتورینگ یا PLC ارسال کند:
- فرکانس خروجی
- جریان موتور
- ولتاژ خروجی
- توان
- گشتاور
- مقدار فیدبک یا خروجی PID
این ویژگی در سیستمهایی که نیاز به مانیتورینگ دقیق اینورتر LS S100 دارند، بسیار کاربردی است.
5) ترمینالهای تغذیه فرمان
در بخش کنترل، معمولاً یک منبع کمکی داخلی نیز برای تجهیزات فرمان در نظر گرفته میشود. این بخش میتواند شامل مواردی مانند:
+10Vبرای پتانسیومتر- تغذیه کمکی برای برخی ورودیها
CMیا Common بهعنوان مرجع مشترک مدار فرمان باشد.
این ترمینالها نقش مهمی در سیمکشی مدار فرمان اینورتر LS S100 دارند، مخصوصاً زمانی که از پتانسیومتر یا فرمانهای دیجیتال خارجی استفاده میشود.
6) ترمینالهای ارتباطی
در بسیاری از مدلها، اینورتر LS S100 از ارتباط سریال مانند RS-485 / Modbus RTU پشتیبانی میکند. این ترمینالها برای اتصال اینورتر به PLC، HMI، سیستم BMS یا SCADA استفاده میشوند.
مزایای استفاده از ارتباط سریال:
- کنترل اینورتر از راه دور
- خواندن پارامترها و وضعیتها
- ارسال فرمان استارت و استپ
- مانیتورینگ خطاها و هشدارها
- یکپارچهسازی با سیستم اتوماسیون صنعتی
اگر هدف شما راهاندازی حرفهای و مانیتورینگ پیشرفته باشد، شناخت این بخش از ترمینالهای ارتباطی اینورتر LS S100 بسیار مهم است.
نکات مهم در سیمکشی ترمینالهای قدرت و فرمان LS S100
برای جلوگیری از خطا و افزایش عمر تجهیز، رعایت نکات زیر توصیه میشود:
| نکته | توضیح |
|---|---|
| جداسازی کابل قدرت و فرمان | کابلهای قدرت و کنترل را از یکدیگر جدا عبور دهید تا نویز کاهش یابد |
| ارت مناسب | ارت اینورتر و موتور باید اصولی و مطمئن باشد |
| استفاده از کابل شیلددار | برای سیگنالهای آنالوگ و ارتباطی بهتر است از کابل شیلددار استفاده شود |
| تطابق ولتاژ ورودی | ولتاژ ورودی حتماً با مدل اینورتر هماهنگ باشد |
| عدم نصب کنتاکتور در خروجی موتور حین کار | قطع و وصل موتور از خروجی اینورتر در حال کار میتواند آسیبزا باشد |
| بررسی ترمینالبندی قبل از برقدار کردن | قبل از راهاندازی اولیه، تمامی اتصالات یکبار بازبینی شوند |
کار با کیپد درایو ال اس S100
صفحهکلید یا کیپد اینورتر S100 برای انجام تنظیمات، مشاهده وضعیت کاری درایو و اجرای برخی فرمانهای کنترلی طراحی شده است. بسته به توان دستگاه، اینورتر S100 با دو نوع نمایشگر ارائه میشود؛ در مدلهای توان پایینتر معمولاً از نمایشگر سونسگمنت و در مدلهای بالاتر از نمایشگر LCD استفاده شده است. در هر دو حالت، کاربر میتواند از طریق کلیدهای کنترلی، بین گروههای پارامتری جابهجا شود، مقادیر را تغییر دهد، فرمان اجرا یا توقف بدهد و وضعیت عملکرد درایو را بررسی کند.
در مدلهای دارای نمایشگر سونسگمنت، معمولاً وضعیت عملکرد، کدهای پارامتر و مقادیر تنظیمی روی نمایشگر نشان داده میشود و چند نشانگر LED نیز برای نمایش وضعیتهایی مانند RUN، جهت چرخش Forward و Reverse و وضعیت تنظیم پارامترها در نظر گرفته شدهاند. این طراحی باعث میشود کاربر در زمان راهاندازی یا سرویس، سریعتر بتواند وضعیت اینورتر را تشخیص دهد.
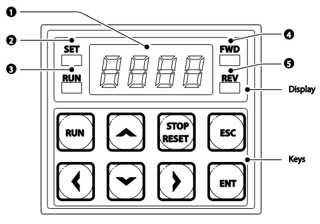
عملکرد کلیدهای کیپد ال اس S100
در ادامه، عملکرد کلیدهای اصلی کیپد اینورتر S100 را مشاهده میکنید:
| کلید | عملکرد |
|---|---|
| RUN | برای راهاندازی اینورتر و ارسال فرمان اجرا از روی کیپد استفاده میشود. |
| STOP/RESET | برای توقف عملکرد درایو به کار میرود. همچنین پس از بروز خطا یا تریپ، از این کلید برای ریست کردن خطا استفاده میشود. |
| ▲ | برای حرکت بین کدها و پارامترها به سمت بالا و همچنین افزایش مقدار پارامتر کاربرد دارد. |
| ▼ | برای حرکت بین کدها و پارامترها به سمت پایین و همچنین کاهش مقدار پارامتر استفاده میشود. |
| ◀ | برای جابهجایی بین گروهها یا حرکت مکاننما به سمت چپ در زمان ویرایش پارامترها کاربرد دارد. |
| ▶ | برای جابهجایی بین گروهها یا حرکت مکاننما به سمت راست در زمان تنظیم پارامترها استفاده میشود. |
| ENT | برای انتخاب پارامتر، تأیید مقدار و ذخیره تنظیمات به کار میرود. |
| ESC | یک کلید چندمنظوره است و برای لغو ورودی، خروج از مرحله تنظیم، اجرای برخی عملکردهای ویژه و جابهجایی Local/Remote استفاده میشود. |
نمایشگر و نشانگرهای وضعیت در کیپد ال اس S100
در مدلهای متداول S100، صفحهکلید علاوه بر نمایشگر اصلی، دارای چند چراغ یا نشانگر وضعیت نیز هست که اطلاعات مهمی را در اختیار اپراتور قرار میدهند:
-
SET Indicator
زمانی که کاربر در حال تنظیم پارامترها باشد یا برخی عملکردهای چندمنظوره فعال شوند، این نشانگر فعال یا چشمکزن میشود.
-
RUN Indicator
در زمان کار کردن اینورتر روشن است و در برخی شرایط مانند شتابگیری یا کاهش سرعت ممکن است به حالت چشمکزن درآید.
-
FWD Indicator
نشان میدهد موتور در جهت جلو در حال کار است.
-
REV Indicator
نشان میدهد موتور در جهت معکوس در حال کار است.
وجود این نشانگرها کمک میکند اپراتور بدون ورود به منوهای پیچیده، خیلی سریع وضعیت لحظهای درایو را تشخیص دهد.
نحوه کار با منوها در کیپد S100
کیپد S100 به گونهای طراحی شده که کاربر بتواند بین گروههای پارامتری و کدهای تنظیمات بهراحتی جابهجا شود. برای این کار:
- با استفاده از کلیدهای ▲ و ▼ میتوان بین کدها حرکت کرد یا مقادیر را تغییر داد.
- با کلیدهای ◀ و ▶ میتوان بین گروهها جابهجا شد یا مکاننما را هنگام ویرایش عدد حرکت داد.
- با کلید ENT میتوان یک پارامتر را انتخاب کرد یا مقدار جدید را ذخیره کرد.
- با کلید ESC میتوان از مرحله جاری خارج شد یا ورود اطلاعات را لغو کرد.
این ساختار باعث میشود اپراتور در زمان راهاندازی اولیه، تغییر تنظیمات یا بررسی وضعیت درایو، فرآیند سادهتری در پیش داشته باشد.
حالت Local و Remote در کیپد LS S100
یکی از قابلیتهای مهم کیپد S100، امکان تغییر بین حالت Local و Remote است.
- در حالت Local، فرمانهای اجرا و توقف مستقیماً از طریق خود کیپد صادر میشوند.
- در حالت Remote، فرمانها از طریق ترمینالهای کنترلی یا سیستمهای بیرونی مانند PLC به اینورتر ارسال میشوند.
این ویژگی در زمان تست، راهاندازی اولیه، عیبیابی و همچنین در کاربردهایی که بخشی از کنترل به صورت دستی و بخشی به صورت اتوماتیک انجام میشود، بسیار کاربردی است.
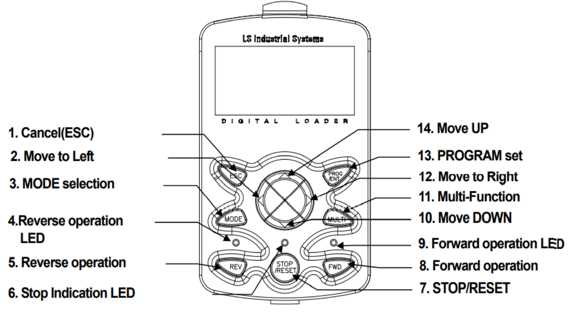
تفاوت کیپد در مدلهای مختلف S100
در برخی مدلهای S100، مخصوصاً در بازههای توان بالاتر، نوع صفحهکلید و ساختار کلیدها ممکن است کمی متفاوت باشد. در این مدلها معمولاً از نمایشگر LCD استفاده میشود و برخی کلیدها با نامهایی مانند MODE، PROG/ENT یا MULTI شناخته میشوند.
در این نوع کیپدها نیز منطق کار مشابه است:
- ورود به حالتهای مختلف
- انتخاب و ویرایش پارامترها
- ذخیره تنظیمات
- برگشت به مرحله قبل
- اجرای فرمان حرکت جلو یا معکوس
- توقف و ریست خطا
بنابراین اگرچه ظاهر کیپد ممکن است در برخی مدلها متفاوت باشد، اما ساختار کلی کار با آن همچنان ساده و مبتنی بر منوهای تنظیماتی و نظارتی است.
تنظیم پارامترها از طریق کیپد S100
برای تنظیم پارامترها در اینورتر S100، معمولاً روند کار به این صورت است:
- ورود به گروه پارامتری موردنظر
- انتخاب کد پارامتر با کلیدهای جهتی
- فشردن ENT برای ورود به حالت ویرایش
- تغییر مقدار پارامتر
- ذخیره نهایی با ENT
- خروج از منو یا بازگشت با ESC
این روش باعث میشود کاربر بتواند بدون نیاز به ابزار جانبی، بسیاری از تنظیمات اصلی اینورتر را مستقیماً از روی کیپد انجام دهد.
پارامترهای مهم اینورتر ال اس S100
پارامترهای اینورتر LS S100 بخش اصلی تنظیم و شخصیسازی عملکرد درایو را تشکیل میدهند. از طریق این پارامترها میتوان رفتار درایو را در بخشهایی مثل فرکانس حامل، گشتاور، شتاب و توقف، ورودی و خروجیهای دیجیتال و آنالوگ، PID، حفاظتها، ترمز، خروجی رلهای، کنترل فن، Speed Search، حالت آتش، کنترل گشتاور و بسیاری قابلیتهای دیگر تنظیم کرد.
در این بخش، مهمترین پارامترهای کاربردی S100 را بهصورت دستهبندیشده و قابل استفاده برای کاربران فنی، تابلوسازان، تعمیرکاران و مهندسان برق بررسی میکنیم.
جدول مرجع پارامترهای مهم اینورتر LS S100
تنظیم فرکانس با ورودیهای Down / Upدر این روش، افزایش یا کاهش فرکانس مرجع از طریق ورودیهای دیجیتال انجام میشود. این قابلیت زمانی کاربرد دارد که اپراتور بخواهد بدون استفاده از سیگنال آنالوگ و تنها با فشردن شستیهای افزایش و کاهش، فرکانس خروجی اینورتر را تغییر دهد.برای فعالسازی این روش، ابتدا باید منبع فرکانس روی حالت مناسب تنظیم شود و سپس ورودیهای دیجیتال مربوط به افزایش و کاهش فرکانس به ترمینالهای دلخواه اختصاص داده شوند.
- Ad-85: مقدار افزایش فرکانس
- Ad-86: مقدار کاهش فرکانس
- Ad-65: تعیین رفتار نگهداری یا ذخیره فرکانس تنظیمشده
- In-68 = 17: تخصیص عملکرد Up به ورودی دیجیتال
- In-69 = 18: تخصیص عملکرد Down به ورودی دیجیتال
در این روش، با هر بار فعال شدن ورودی Up، فرکانس به اندازه مقدار تعریفشده افزایش مییابد و با فعال شدن ورودی Down، به همان میزان کاهش پیدا میکند. این قابلیت برای کنترل دستی سرعت در ماشینآلات ساده، سیستمهای موضعی و تابلوهای فرمان بسیار مناسب است.
| عنوان عملکرد | گروه | شماره پارامتر | بازه / مقدار | توضیح فنی |
|---|---|---|---|---|
| فرکانس حامل | Cn | Cn-04 | 1 تا 15 kHz | تنظیم فرکانس سوئیچینگ اینورتر برای کنترل صدای موتور، تلفات حرارتی و نویز |
| فعالسازی افزایش دستی گشتاور | dr | dr-15 | 0 | فعالسازی عملکرد Manual Torque Boost |
| افزایش گشتاور در جهت مستقیم | dr | dr-16 | 0 تا 15% | تنظیم تقویت گشتاور در حرکت Forward |
| افزایش گشتاور در جهت معکوس | dr | dr-17 | 0 تا 15% | تنظیم تقویت گشتاور در حرکت Reverse |
| خروجی رلهای 1 | OU | OU-31 | چند حالته | انتخاب عملکرد خروجی رلهای اول |
| خروجی رلهای 2 | OU | OU-32 | چند حالته | انتخاب عملکرد خروجی رلهای دوم |
| خروجی ترانزیستوری | OU | OU-33 | چند حالته | انتخاب عملکرد خروجی ترانزیستوری Q1 |
| انتخاب نوع خروجی آنالوگ | OU | OU-01 | 0 تا 15 | تخصیص متغیرهایی مانند فرکانس، جریان، توان، گشتاور، PID و… به خروجی آنالوگ |
| اسکیل خروجی آنالوگ | OU | OU-05 | 0 تا 100% | تنظیم ضریب یا درصد مقیاس خروجی آنالوگ |
| محدودیت جهت گردش | Ad | Ad-09 | 0 / 1 / 2 | انتخاب حرکت در هر دو جهت، فقط معکوس یا فقط مستقیم |
| حالت عملکرد فن خنککننده | Ad | Ad-64 | 0 / 1 / 2 | کنترل فن در حالت اجرا، دائم روشن یا بر اساس دما |
| فعالسازی PID | AP | AP-01 | 2 | فعالسازی حلقه کنترل PID داخلی درایو |
| نوع فیدبک PID | AP | AP-21 | 0 / 3 / 4 | انتخاب ورودی فیدبک از ولتاژ، جریان یا RS-485 |
| محدودکننده بالای PID | AP | AP-29 | 0.1 تا 400 | حد بالای فرکانس خروجی کنترلکننده PID |
| محدودکننده پایین PID | AP | AP-30 | 0.1 تا 400 | حد پایین فرکانس خروجی کنترلکننده PID |
| مرجع تنظیم PID | AP | AP-20 | 0 / 1 / 4 / 5 | تعیین منبع Setpoint از کیپد، ورودی آنالوگ یا RS-485 |
| ضریب تناسبی | AP | AP-22 | 0 تا 999% | تنظیم ضریب P |
| ضریب انتگرالی | AP | AP-23 | 0.1 تا 32 s | تنظیم ضریب I |
| ضریب مشتقی | AP | AP-24 | 0 تا 30 s | تنظیم ضریب D |
| Setpoint PID | AP | AP-19 | - | تنظیم مقدار مرجع سیستم PID |
| Feedback PID | AP | AP-18 | - | نمایش مقدار فیدبک سیستم PID |
| Sleep Delay | AP | AP-37 | 0 تا 9999 s | تاخیر ورود به حالت Sleep |
| Sleep Frequency | AP | AP-38 | 0 تا 400 | فرکانس ورود به حالت Sleep |
| Wake Up Level | AP | AP-39 | 0 تا 100% | سطح بیدارباش سیستم PID |
| انتخاب مرجع فرکانس از RS-485 | Frq | Frq | 6 | دریافت فرمان فرکانس از طریق شبکه RS-485 |
| آدرس شبکه اینورتر | CM | CM-01 | 1 تا 247 | تعیین آدرس اینورتر در شبکه Modbus |
| پروتکل ارتباطی | CM | CM-02 | - | انتخاب نوع پروتکل ارتباطی |
| سرعت ارتباط | CM | CM-03 | - | تنظیم Baud Rate ارتباط RS-485 |
| فعالسازی محدوده فرکانسی High/Low | Ad | Ad-24 | 1 | فعال کردن محدودیت بالا و پایین فرکانس |
| حد پایین فرکانس | Ad | Ad-25 | - | کمینه فرکانس مجاز خروجی |
| حد بالای فرکانس | Ad | Ad-26 | - | بیشینه فرکانس مجاز خروجی |
| فعالسازی Skip Frequency | Ad | Ad-27 | 1 | فعالسازی پرش از فرکانسهای رزنانسی |
| بازه اول فرکانس پرش | Ad | Ad-28 / Ad-29 | 0.1 تا 400 Hz | حد پایین و بالای بازه اول فرکانس ممنوعه |
| بازه دوم فرکانس پرش | Ad | Ad-30 / Ad-31 | 0.1 تا 400 Hz | حد پایین و بالای بازه دوم فرکانس ممنوعه |
| بازه سوم فرکانس پرش | Ad | Ad-32 / Ad-33 | 0.1 تا 400 Hz | حد پایین و بالای بازه سوم فرکانس ممنوعه |
| مرجع زمان شتاب/توقف | bA | bA-08 | 0 / 1 | انتخاب مبنای زمان ACC/DEC بر اساس فرکانس ماکزیمم یا فرکانس فرمان |
| دقت زمان شتاب/توقف | bA | bA-09 | 0 / 1 / 2 | تنظیم رزولوشن زمانی با دقت 0.01، 0.1 یا 1 ثانیه |
| ورودی انتخاب ACC/DEC چندگانه | In | In-67 / In-68 / In-69 | 11 / 12 / 48 | انتخاب مجموعههای مختلف زمان شتاب و توقف از طریق ترمینالها |
| زمان شتاب اول | bA | bA-70 | 0 تا 6000 s | زمان افزایش سرعت اول |
| زمان توقف اول | bA | bA-71 | 0 تا 6000 s | زمان کاهش سرعت اول |
| زمان شتاب هفتم | bA | bA-82 | 0 تا 6000 s | زمان افزایش سرعت هفتم |
| زمان توقف هفتم | bA | bA-83 | 0 تا 6000 s | زمان کاهش سرعت هفتم |
| الگوی شتاب/توقف | Ad | Ad-01 | 0 / 1 | انتخاب الگوی خطی یا منحنی برای ACC/DEC |
| شروع شتاب منحنی | Ad | Ad-03 | 1 تا 100% | تنظیم نقطه شروع منحنی شتاب |
| پایان شتاب منحنی | Ad | Ad-04 | 1 تا 100% | تنظیم نقطه پایان منحنی شتاب |
| شروع کاهش منحنی | Ad | Ad-05 | 1 تا 100% | تنظیم نقطه شروع منحنی کاهش |
| پایان کاهش منحنی | Ad | Ad-06 | 1 تا 100% | تنظیم نقطه پایان منحنی کاهش |
| روش توقف | Ad | Ad-08 | 0 / 1 / 2 | توقف با شیب، ترمز DC یا رهاسازی آزاد |
| زمان قبل از ترمز DC | Ad | Ad-14 | 0 تا 60 s | تاخیر قبل از شروع تزریق جریان ترمز |
| زمان ترمز DC | Ad | Ad-15 | 0 تا 60 s | مدت تزریق جریان DC هنگام توقف |
| ولتاژ ترمز DC | Ad | Ad-16 | 0 تا 200% | شدت ترمز DC |
| فرکانس شروع ترمز DC | Ad | Ad-17 | 0.1 تا 60 Hz | فرکانس شروع عملکرد ترمز DC |
| درصد کار مقاومت ترمزی | Pr | Pr-66 | 0 تا 30% | تنظیم Duty مقاومت ترمز |
| روش راهاندازی | Ad | Ad-07 | 0 / 1 | راهاندازی با شتاب یا با ترمز DC |
| زمان تزریق DC هنگام استارت | Ad | Ad-12 | 0 تا 60 s | مدت تزریق ولتاژ DC در شروع حرکت |
| ولتاژ DC هنگام استارت | Ad | Ad-13 | 0 تا 200% | مقدار تزریق DC برای استارت |
| فرکانس توقف موقت در شتاب | Ad | Ad-20 | 0.1 تا 400 Hz | فرکانس Dwell هنگام ACC |
| زمان توقف موقت در شتاب | Ad | Ad-21 | 0 تا 60 s | مدت Dwell هنگام ACC |
| فرکانس توقف موقت در کاهش | Ad | Ad-22 | 0.1 تا 400 Hz | فرکانس Dwell هنگام DEC |
| زمان توقف موقت در کاهش | Ad | Ad-23 | 0 تا 60 s | مدت Dwell هنگام DEC |
| مد کنترلی درایو | dr | dr-09 | 0 / 2 / 4 | انتخاب کنترل V/F، جبران لغزش یا برداری بدون سنسور |
| الگوی V/F | bA | bA-07 | 0 / 1 / 2 | انتخاب منحنی V/F خطی، مربعی یا کاربر |
| فرکانسهای منحنی کاربر | bA | bA-41 / 43 / 45 / 47 | 0 تا 400 Hz | نقاط فرکانسی تعریف منحنی V/F کاربر |
| ولتاژهای منحنی کاربر | bA | bA-42 / 44 / 46 / 48 | 0 تا 100% | نقاط ولتاژی منحنی V/F کاربر |
| فعالسازی Auto Tune | bA | bA-20 | 1 | فعالسازی تیونینگ خودکار موتور |
| ذخیره انرژی دستی | Ad | Ad-50 | 1 | فعالسازی کاهش ولتاژ خروجی برای کاهش مصرف انرژی |
| درصد کاهش ولتاژ | Ad | Ad-51 | 0 تا 30% | میزان کاهش ولتاژ در حالت ذخیره انرژی دستی |
| ذخیره انرژی اتوماتیک | Ad | Ad-50 | 2 | فعالسازی ذخیره انرژی خودکار |
| تنظیم ولتاژ خروجی | bA | bA-15 | 180 تا 480 V | کاهش یا تنظیم سطح ولتاژ خروجی برای موتورهای خاص |
| Power-On Run | Ad | Ad-10 | 1 | راهاندازی خودکار درایو پس از وصل برق |
| عملکرد حفاظتی گرمای الکترونیکی | Pr | Pr-40 | 0 / 1 / 2 | انتخاب نحوه واکنش درایو به اضافهحرارت موتور |
| نوع خنککاری موتور | Pr | Pr-41 | 0 / 1 | فن سرخود یا فن مجزا |
| اضافهبار یک دقیقهای موتور | Pr | Pr-42 | 50 تا 200% | حد جریان مجاز کوتاهمدت موتور |
| اضافهبار پیوسته موتور | Pr | Pr-43 | 50 تا 180% | حد جریان مجاز پیوسته موتور |
| هشدار اضافهبار | Pr | Pr-17 | 1 | فعالسازی هشدار اضافهبار |
| سطح هشدار اضافهبار | Pr | Pr-18 | 30 تا 180% | درصد بار برای صدور هشدار |
| زمان هشدار اضافهبار | Pr | Pr-19 | 0 تا 30 s | تاخیر صدور هشدار اضافهبار |
| لغزش اضافهبار | Pr | Pr-20 | 1 / 3 | واکنش درایو در حالت Overload Stall |
| سطح اضافهبار | Pr | Pr-21 | 30 تا 200% | سطح تشخیص لغزش اضافهبار |
| زمان اضافهبار | Pr | Pr-22 | 0 تا 60 s | مدت زمان لازم برای تشخیص اضافهبار |
| فرکانس عملکرد FDT | OU | OU-57 | 0 تا 400 Hz | فرکانس فعالسازی خروجیهای FDT |
| پهنای باند FDT | OU | OU-58 | 0 تا 400 Hz | تنظیم پهنای باند عملکرد FDT |
| انتخاب نوع FDT برای خروجیها | OU | OU-31 / 32 / 33 | 1 / 2 / 3 / 4 | اختصاص FDT-1 تا FDT-4 به خروجیها |
| تنظیم بیتهای Speed Search | Cn | Cn-71 | 0000 | فعالسازی حالات مختلف جستجوی سرعت |
| Block Time | Cn | Cn-75 | 0 تا 60 s | تاخیر قبل از شروع Speed Search |
| Timer In | In | In-65 تا In-71 | 38 | فعالسازی تایمر از طریق ورودی دیجیتال |
| Timer Out | OU | OU-31 تا OU-33 | 28 | اختصاص تایمر به خروجیهای دیجیتال |
| تاخیر وصل خروجی | OU | OU-55 | 0 تا 100 s | تاخیر فعال شدن خروجی دیجیتال |
| تاخیر قطع خروجی | OU | OU-56 | 0 تا 100 s | تاخیر غیرفعال شدن خروجی دیجیتال |
| تشخیص قطع فاز | Pr | Pr-05 | 01 / 10 | تشخیص قطع فاز ورودی یا خروجی |
| فعالسازی ریاستارت خودکار | Pr | Pr-08 | 1 | فعالسازی Automatic Restart |
| تعداد دفعات ریاستارت | Pr | Pr-09 | 0 تا 10 | حداکثر دفعات راهاندازی مجدد خودکار |
| زمان تاخیر ریاستارت | Pr | Pr-10 | 0 تا 600 s | فاصله زمانی بین تلاشهای ریاستارت |
| Analog Hold | In | In-65 تا In-71 | 21 | |
| افزایش فرکانس با ورودی دیجیتال | Ad | Ad-85 | - | میزان افزایش فرکانس در عملکرد Up |
| کاهش فرکانس با ورودی دیجیتال | Ad | Ad-86 | - | میزان کاهش فرکانس در عملکرد Down |
| حفظ مقدار فرکانس Up/Down | Ad | Ad-65 | 0 / 1 | تعیین ذخیره یا ریست شدن فرکانس تنظیمشده |
| ورودی Up | In | In-68 | 17 | اختصاص ورودی دیجیتال برای افزایش فرکانس |
| ورودی Down | In | In-69 | 18 | اختصاص ورودی دیجیتال برای کاهش فرکانس |
| تاخیر ورودی دیجیتال در وصل | OU | OU-50 | 0 تا 100 s | تنظیم تاخیر در فعال شدن ورودی دیجیتال |
| تاخیر ورودی دیجیتال در قطع | OU | OU-51 | 0 تا 100 s | تنظیم تاخیر در غیرفعال شدن ورودی دیجیتال |
| نمایش وضعیت ترمینال ورودی | In | In-90 | - | نمایش وضعیت On/Off ورودیهای دیجیتال |
| فرکانس وصل در On/Off Control | Ad | Ad-67 | 0 تا 100% | درصدی از فرکانس ماکزیمم برای وصل خروجی |
| فرکانس قطع در On/Off Control | Ad | Ad-68 | 0 تا 100% | درصدی از فرکانس ماکزیمم برای قطع خروجی |
| تغییر واحد نمایش | dr | dr-21 | 0 / 1 | نمایش فرکانس یا سرعت بر حسب RPM |
| فرکانس تغییر مجموعه ACC/DEC | Ad | Ad-60 | 0 تا 60 | فرکانس سوئیچ بین دو مجموعه زمان شتاب و توقف |
| نوع کنتاکت خروجی | OU | OU-52 | بیتی | تنظیم حالت NO/NC برای خروجیهای دیجیتال |
| حالت آتش | Ad | Ad-80 | 1 | فعالسازی Fire Mode |
| فرکانس حالت آتش | Ad | Ad-81 | 0 تا
f |
نکات سیمبندی ورودیهای آنالوگ در اینورتر LS S100
| موضوع | شرح |
|---|---|
| ترمینال ولتاژی | برای ورود سیگنال ولتاژی معمولاً از ورودی V1 یا V2 استفاده میشود. |
| ترمینال جریانی | برای ورود سیگنال 4 تا 20 میلیآمپر از ترمینال I استفاده میشود. |
| مرجع مشترک | برای بستن حلقه سیگنال آنالوگ از CM بهعنوان مرجع مشترک استفاده میشود. |
| شیلد کابل | برای کاهش نویز، از کابل شیلددار استفاده شود و شیلد از یک سمت زمین گردد. |
| تفکیک مسیر سیمکشی | سیمهای آنالوگ از کابلهای قدرت و خروجی موتور جدا عبور داده شوند. |
تنظیم دقیق حداقل و حداکثر سیگنال آنالوگ
| پارامتر | گروه | کد | بازه / مقدار | توضیح |
|---|---|---|---|---|
| کمینه ورودی آنالوگ | Ad | Ad-90 | - | تنظیم نقطه شروع سیگنال آنالوگ برای کالیبراسیون |
| بیشینه ورودی آنالوگ | Ad | Ad-91 | - | تنظیم نقطه انتهایی سیگنال آنالوگ برای کالیبراسیون |
| فیلتر ورودی آنالوگ | Ad | Ad-92 | - | کاهش اثر نویز و نوسان روی مرجع آنالوگ |
منطق انتخاب فرکانسهای چندمرحلهای با ورودیهای دیجیتال
| پارامتر | گروه | کد | بازه / مقدار | توضیح |
|---|---|---|---|---|
| فرکانس چندمرحلهای 1 | Frq | Frq-13 | 0 تا فرکانس نامی | مقدار فرکانس مرحله اول |
| فرکانس چندمرحلهای 2 | Frq | Frq-14 | 0 تا فرکانس نامی | مقدار فرکانس مرحله دوم |
| فرکانس چندمرحلهای 3 | Frq | Frq-15 | 0 تا فرکانس نامی | مقدار فرکانس مرحله سوم |
| انتخاب چندمرحلهای 1 | In | In-65 تا In-71 | 8 | اختصاص ورودی دیجیتال برای بیت انتخاب اول |
| انتخاب چندمرحلهای 2 | In | In-65 تا In-71 | 9 | اختصاص ورودی دیجیتال برای بیت انتخاب دوم |
| انتخاب چندمرحلهای 3 | In | In-65 تا In-71 | 10 | اختصاص ورودی دیجیتال برای بیت انتخاب سوم |
کاربرد فرکانس Jog در راهاندازی و تست
| پارامتر | گروه | کد | بازه / مقدار | توضیح |
|---|---|---|---|---|
| فرکانس Jog | Frq | Frq-12 | 0 تا فرکانس نامی | تعیین فرکانس حرکت لحظهای برای تست و تنظیم |
| ورودی Jog | In | In-65 تا In-71 | 13 | اختصاص ورودی دیجیتال برای اجرای فرمان Jog |
پارامترهای Fire Mode و Torque Control در اینورتر LS S100
| عنوان | گروه پارامتر | شماره پارامتر | مقدار / بازه | توضیح |
|---|---|---|---|---|
| فرکانس عملکرد اینورتر در Fire Mode | Ad | Ad-81 | 0 تا فرکانس نامی | تعیین فرکانس کاری اینورتر در حالت آتش |
| جهت گردش در حالت آتش | Ad | Ad-82 | 0 / 1 | انتخاب راستگرد یا چپگرد در Fire Mode |
| ورودی دیجیتال Fire Mode | In | In-65 تا In-71 | 51 | اختصاص ورودی دیجیتال برای فعالسازی حالت آتش |
| خروجی دیجیتال Fire Mode | OU | OU-31 تا OU-33 | 38 | اعلام فعال بودن حالت آتش از طریق خروجی |
| Exchange Input | In | In-65 تا In-71 | 16 | اختصاص ورودی برای عملکرد Exchange |
| رله خط اینورتر | OU | OU-32 تا OU-35 | 17 | فرمان وصل به خط اینورتر |
| رله خط برق شهر | OU | OU-32 تا OU-35 | 18 | فرمان وصل به برق مستقیم |
| فعالسازی Torque Control | dr | dr-10 | 1 | فعالسازی کنترل گشتاور |
| گشتاور فرمان | dr | dr-02 | -180 تا 180% | تنظیم مقدار مرجع گشتاور |
| منبع تنظیم گشتاور | dr | dr-08 | 0 / 2 / 5 / 6 / 12 | کیپد، ورودی ولتاژی، جریانی، RS-485 یا Pulse |
| منبع تنظیم سرعت در Torque Control | Cn | Cn-62 | 0 / 2 / 5 / 6 | تعیین مرجع سرعت در حالت کنترل گشتاور |
| حد سرعت مستقیم | Cn | Cn-63 | 0 تا fmax | محدودیت سرعت در جهت مستقیم |
| حد سرعت معکوس | Cn | Cn-64 | 0 تا fmax | محدودیت سرعت در جهت معکوس |
| فرکانس عملکرد اینورتر در Fire Mode | Ad | Ad-81 | 0 تا فرکانس نامی | تعیین فرکانس کاری اینورتر در حالت آتش |
| جهت گردش در حالت آتش | Ad | Ad-82 | 0 / 1 | انتخاب راستگرد یا چپگرد در Fire Mode |
| ورودی دیجیتال Fire Mode | In | In-65 تا In-71 | 51 | اختصاص ورودی دیجیتال برای فعالسازی حالت آتش |
| خروجی دیجیتال Fire Mode | OU | OU-31 تا OU-33 | 38 | اعلام فعال بودن حالت آتش از طریق خروجی |
| Exchange Input | In | In-65 تا In-71 | 16 | اختصاص ورودی برای عملکرد Exchange |
| رله خط اینورتر | OU | OU-32 تا OU-35 | 17 | فرمان وصل به خط اینورتر |
| رله خط برق شهر | OU | OU-32 تا OU-35 | 18 | فرمان وصل به برق مستقیم |
| فعالسازی Torque Control | dr | dr-10 | 1 | فعالسازی کنترل گشتاور |
| گشتاور فرمان | dr | dr-02 | -180 تا 180% | تنظیم مقدار مرجع گشتاور |
| منبع تنظیم گشتاور | dr | dr-08 | 0 / 2 / 5 / 6 / 12 | کیپد، ورودی ولتاژی، جریانی، RS-485 یا Pulse |
| منبع تنظیم سرعت در Torque Control | Cn | Cn-62 | 0 / 2 / 5 / 6 | تعیین مرجع سرعت در حالت کنترل گشتاور |
| حد سرعت مستقیم | Cn | Cn-63 | 0 تا fmax | محدودیت سرعت در جهت مستقیم |
| حد سرعت معکوس | Cn | Cn-64 | 0 تا fmax | محدودیت سرعت در جهت معکوس |
رجیسترهای مهم Modbus در اینورتر LS S100
| رجیستر | آدرس | نوع دسترسی | شرح |
|---|---|---|---|
| Run Command | 0001h | Read/Write | فرمان اجرای اینورتر |
| Frequency Command | 0002h | Read/Write | مرجع فرکانس اینورتر |
| Output Frequency | 0003h | Read | فرکانس خروجی واقعی |
| Output Current | 0004h | Read | جریان خروجی اینورتر |
| Fault Code | 0005h | Read | کد خطای فعال |
کدهای مهم خروجیهای دیجیتال در اینورتر ال اس S100
برای تنظیم عملکرد خروجیهای رلهای و ترانزیستوری در پارامترهای OU-31، OU-32 و OU-33 میتوان از کدهای زیر استفاده کرد:
| کد | عملکرد خروجی |
|---|---|
| 1 | FDT-1 |
| 2 | FDT-2 |
| 3 | FDT-3 |
| 4 | FDT-4 |
| 5 | اضافه بار |
| 6 | اضافه بار اینورتر |
| 8 | آلارم فن خنککننده |
| 9 | توقف موتور |
| 10 | اضافه ولتاژ |
| 11 | افت ولتاژ |
| 12 | افزایش دمای اینورتر |
| 13 | از بین رفتن دستور |
| 14 | Run بودن اینورتر |
| 15 | در حال توقف |
| 16 | کارکرد با سرعت ثابت |
| 19 | Speed Search |
| 29 | خروجی خطا |
| 31 | عملکرد مقاومت ترمزی |
| 28 | Timer Out |
| 38 | Fire Mode Active |
کدهای مهم خروجی آنالوگ در پارامتر OU-01
| مقدار | متغیر تخصیص داده شده به خروجی آنالوگ |
|---|---|
| 0 | فرکانس خروجی |
| 1 | جریان خروجی |
| 2 | ولتاژ خروجی |
| 3 | ولتاژ لینک DC |
| 4 | گشتاور خروجی |
| 5 | توان خروجی |
| 6 | ماکزیمم ولتاژ خروجی در بیباری |
| 7 | ماکزیمم ولتاژ خروجی در گشتاور نامی |
| 8 | فرکانس هدف |
| 9 | سطح فرکانس |
| 10 | سرعت فیدبک انکدر |
| 12 | مقدار مرجع PID |
| 13 | مقدار فیدبک PID |
| 14 | خروجی PID |
| 15 | مقدار ثابت |
مقادیر مهم مد کنترلی در پارامتر dr-09
| مقدار | مد کاری | توضیح |
|---|---|---|
| 0 | V/F | کنترل ساده ولتاژ به فرکانس برای کاربردهای عمومی مثل پمپ و فن |
| 2 | Slip Compensation | جبران لغزش برای بهبود پایداری سرعت در بار |
| 4 | Sensorless Vector | کنترل برداری بدون سنسور برای دقت و گشتاور بهتر |
مقادیر مهم پارامتر bA-07 برای منحنی V/F
| مقدار | نوع منحنی | کاربرد |
|---|---|---|
| 0 | V/F خطی | مناسب بارهای با گشتاور ثابت |
| 1 | V/F مربعی | مناسب فن و پمپ |
| 2 | V/F کاربر | تعریف دستی منحنی ولتاژ/فرکانس توسط کاربر |
مقادیر مهم پارامتر Ad-08 برای روش توقف
| مقدار | روش توقف | توضیح |
|---|---|---|
| 0 | Deceleration Stop | توقف با شیب کاهش سرعت |
| 1 | DC Braking Stop | توقف با تزریق جریان DC |
| 2 | Run Free Stop | توقف آزاد بر اساس اینرسی بار |
مقادیر مهم پارامتر Ad-07 برای روش راهاندازی
| مقدار | روش استارت | توضیح |
|---|---|---|
| 0 | ACC Start | راهاندازی معمولی با شیب شتاب |
| 1 | DC Braking Start | استفاده از تزریق DC در لحظه شروع حرکت |
مقادیر مهم پارامتر Ad-64 برای کنترل فن
| مقدار | حالت فن | توضیح |
|---|---|---|
| 0 | فعال در حین اجرا | فن فقط هنگام کارکرد اینورتر روشن میشود |
| 1 | همیشه روشن | فن با روشن شدن اینورتر فعال میشود |
| 2 | کنترل دمایی | فن بر اساس دمای هیتسینک روشن و خاموش میشود |
مقادیر مهم پارامتر Ad-09 برای محدودیت جهت گردش
| مقدار | جهت چرخش | توضیح |
|---|---|---|
| 0 | دوطرفه | حرکت در هر دو جهت مستقیم و معکوس مجاز است |
| 1 | فقط معکوس | حرکت فقط در جهت Reverse انجام میشود |
| 2 | فقط مستقیم | حرکت فقط در جهت Forward انجام میشود |
مقادیر مهم پارامتر dr-08 برای منبع تنظیم گشتاور
| مقدار | منبع | توضیح |
|---|---|---|
| 0 | Keypad | تنظیم گشتاور از طریق کیپد |
| 2 | Voltage Input | تنظیم گشتاور از طریق ورودی آنالوگ ولتاژی |
| 5 | Current Input | تنظیم گشتاور از طریق ورودی آنالوگ جریانی |
| 6 | RS-485 | تنظیم گشتاور از طریق شبکه ارتباطی |
| 12 | Pulse | تنظیم گشتاور از طریق پالس |
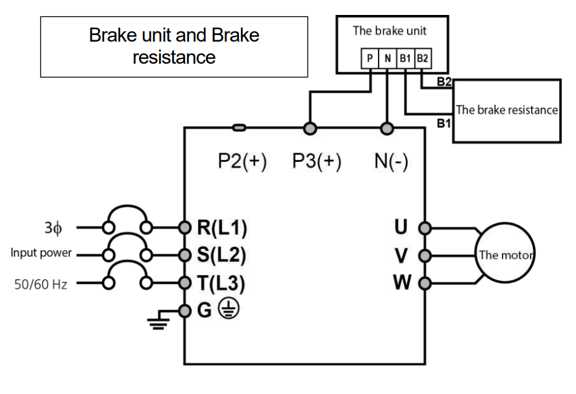
یونیت ترمز دینامیکی (DBU) و مقاومت ترمز در اینورتر LS S100
در کاربردهایی که موتور باید با سرعت بالا متوقف شود، بار اینرسی زیادی دارد، یا در زمان کاهش سرعت انرژی برگشتی از موتور به باس DC اینورتر بازمیگردد، استفاده از مقاومت ترمز و در برخی توانها یونیت ترمز دینامیکی (DBU) ضروری میشود.
| نوع ورودی | توان اینورتر (kW) | مقدار مقاومت (Ω) | توان مقاومت (W) |
|---|---|---|---|
| تکفاز 200V | 0.4 | 300 | 100 |
| تکفاز 200V | 0.75 | 150 | 150 |
| تکفاز 200V | 1.5 | 60 | 300 |
| تکفاز 200V | 2.2 | 50 | 400 |
| سهفاز 200V | 0.4 | 300 | 100 |
| سهفاز 200V | 0.75 | 150 | 150 |
| سهفاز 200V | 1.5 | 60 | 300 |
| سهفاز 200V | 2.2 | 50 | 400 |
| سهفاز 200V | 3.7 | 33 | 600 |
| سهفاز 200V | 4.0 | 33 | 600 |
| سهفاز 200V | 5.5 | 20 | 800 |
| سهفاز 200V | 7.5 | 15 | 1200 |
| سهفاز 200V | 11 | 10 | 2400 |
| سهفاز 200V | 15 | 8 | 2400 |
| سهفاز 400V | 0.4 | 1200 | 100 |
| سهفاز 400V | 0.75 | 600 | 150 |
| سهفاز 400V | 1.5 | 300 | 300 |
| سهفاز 400V | 2.2 | 200 | 400 |
| سهفاز 400V | 3.7 | 130 | 600 |
| سهفاز 400V | 4.0 | 130 | 600 |
| سهفاز 400V | 5.5 | 85 | 1000 |
| سهفاز 400V | 7.5 | 60 | 1200 |
| سهفاز 400V | 11 | 40 | 2000 |
| سهفاز 400V | 15 | 30 | 2400 |
| سهفاز 400V | 18.5 | 20 | 3600 |
| سهفاز 400V | 22 | 20 | 3600 |
| سهفاز 400V | 30 | 16.9 | 6400 |
| سهفاز 400V | 37 | 16.9 | 6400 |
| سهفاز 400V | 45 | 11.4 | 9600 |
| سهفاز 400V | 55 | 11.4 | 9600 |
| سهفاز 400V | 75 | 8.4 | 12800 |
💡 نکات مهندسی انتخاب مقاومت ترمز
- مقادیر جدول برای توانهای تا ۲۲ kW بر اساس گشتاور ترمز ۱۵۰٪ و چرخه کاری ۵٪ ED هستند؛ از ۳۰ kW به بالا مبنا ۱۰۰٪ گشتاور و ۱۰٪ ED است.
- در صورت افزایش چرخه کاری ترمز (٪ED) – مثلاً در کاربردهای پرتوقف یا سنگین – توان نامی مقاومت باید متناسب افزایش یابد (برای ED دو برابر ⇒ توان دو برابر).
- انتخاب مقاومت باید بر پایهی اهم، توان حرارتی، زمان توقف و تعداد ترمزگیریها انجام شود، نه فقط توان اینورتر.
- مقادیر جدول فقط برای DB Unit نوع A معتبرند؛ برای نوع B و C باید به دفترچه راهنمای اختصاصی مراجعه شود.
- انتخاب نادرست مقاومت ممکن است موجب اضافه ولتاژ (OV) یا افزایش دما در اینورتر شود.
- در کاربردهای سنگین (بالابر، جرثقیل، خطوط انتقال، ماشینآلات با اینرسی زیاد) انتخاب برک رزیستور دقیق حیاتی است.
- برای خرید و راهنمایی تخصصی، تیم الکترومارکت مرجع مناسبی برای انتخاب مقاومت آلومینیومی مناسب S100 است.
اگر در حال بررسی خرید اینورتر LS S100 یا انتخاب لوازم جانبی اینورتر LS هستید، توجه به مشخصات DB Unit و مقاومت ترمز نقش مهمی در افزایش ایمنی، بهبود عملکرد ترمزگیری و جلوگیری از آسیب به درایو دارد. استفاده از مقاومت ترمز آلومینیومی الکترومارکت مناسب برای اینورتر LS S100 بهخصوص در کاربردهای سنگین و صنعتی، باعث عملکرد مطمئنتر سیستم و افزایش عمر تجهیزات خواهد شد.
لینک خرید مقاومت ترمز آلومینیومی برای درایو ال اس S100
راهنمای کامل کدهای خطا، هشدار و عیبیابی اینورتر LS S100
برای عیبیابی کامل، لیست کدهای خطا و هشدارها در جداول زیر آورده شده است. این جداول شامل کد، نام، توضیح، علل احتمالی و راهحلهای عیبیابی هستند. برای موارد پیچیده، با کارشناسان الکترومارکت تماس بگیرید.
| کد خطا | عنوان نمایشگر | نوع خطا | شرح کوتاه | علتهای رایج | راهحل پیشنهادی |
|---|---|---|---|---|---|
| olt | Over Load | Latch | فعال شدن حفاظت اضافهبار موتور | بار موتور بیش از حد مجاز است، مقدار Trip پایین تنظیم شده | ظرفیت موتور و اینورتر را بررسی کنید، مقدار Pr.21 را افزایش دهید |
| ult | Under Load | Latch | فعال شدن حفاظت کمباری موتور | اتصال موتور و بار مشکل دارد، حد کمباری نامناسب تنظیم شده | اتصال بار را بررسی کنید، مقدار Underload را اصلاح کنید |
| oct | Over Current1 | Latch | افزایش جریان خروجی بیش از 200% جریان نامی | زمان شتاب/کاهش کوتاه، بار زیاد یا هرزگردی موتور | زمان Acc/Dec را افزایش دهید، اینورتر قویتر انتخاب کنید، از Speed Search استفاده کنید |
| ovt | Over Voltage | Latch | افزایش ولتاژ مدار DC داخلی بیش از حد مجاز | زمان Dec کوتاه، بار ژنراتوری، ولتاژ ورودی زیاد | زمان Deceleration را افزایش دهید، یونیت ترمز نصب کنید، ولتاژ ورودی را بررسی کنید |
| lut | Low Voltage | Level | کاهش ولتاژ DC زیر حد مجاز | افت ولتاژ ورودی، ضعف شبکه، خرابی کنتاکتور | ولتاژ ورودی را اندازهگیری کنید، منبع تغذیه را تقویت کنید، کنتاکتور را تعویض کنید |
| lv2 | Low Voltage2 | Latch | افت ولتاژ DC در حین کار | قطع فاز یا خرابی کنتاکتور | ورودی برق و سیمکشی را بررسی کنید، کنتاکتور را تعویض کنید |
| gft | Ground Trip | Latch | تشخیص اتصال زمین در خروجی اینورتر | اتصال زمین در کابل خروجی یا خرابی عایق موتور | کابلکشی خروجی و عایق موتور را تست کنید |
| eth | E-Thermal | Latch | فعال شدن حفاظت حرارتی الکترونیکی موتور | داغ شدن موتور، بار زیاد، تنظیم نامناسب حفاظت | بار را کاهش دهید، تنظیمات حرارتی را اصلاح کنید، از موتور مناسب استفاده کنید |
| pot | Out Phase Open | Latch | قطع شدن یکی از فازهای خروجی | خرابی کابل یا سیمکشی موتور | کنتاکتور خروجی و سیمکشی را بررسی کنید |
| ipo | In Phase Open | Latch | قطع شدن یکی از فازهای ورودی | خرابی سیمکشی یا کنتاکتور، مشکل DC Link | برق ورودی و سیمکشی را چک کنید، کنتاکتور و خازن را بررسی کنید |
| iol | Inverter OLT | Latch | اضافهبار یا گرمای بیش از حد خود اینورتر | بار بالا، تنظیم نامناسب Torque Boost | ظرفیت اینورتر را بررسی کنید، Torque Boost را کاهش دهید |
| nmh | No Motor Trip | Latch | عدم اتصال موتور در هنگام کار | موتور به اینورتر متصل نیست | اتصال موتور را بررسی کنید |
| oht | Over Heat | Latch | افزایش دمای هیتسینک اینورتر | تهویه نامناسب، خرابی فن، دمای محیط بالا | مسیر هوا را باز کنید، فن را تعویض کنید، دمای محیط را کاهش دهید |
| oc2 | Over Current2 | Latch | تشخیص جریان شدید یا اتصال کوتاه داخلی | اتصال کوتاه در خروجی یا خرابی IGBT | سیمکشی خروجی را بررسی کنید، خدمات فنی را مطلع کنید |
| ext | External Trip | Latch | دریافت سیگنال خطای خارجی | ورودی External فعال شده | ورودیهای چندمنظوره و سنسورهای خارجی را بررسی کنید |
| bx | BX | Level | بلوکه شدن خروجی از طریق ورودی کنترل BX | سیگنال BX فعال شده | منطق کنترلی و ورودی BX را بررسی کنید |
| hwt | H/W-Diag | Fatal | خطای سختافزاری (EEPROM یا CPU Watchdog) | خرابی سختافزار داخلی | دستگاه را خاموش کرده و به خدمات تخصصی ارجاع دهید |
| ntc | NTC Open | Latch | خرابی سنسور دمای IGBT | دمای بسیار پایین یا خرابی سنسور | سنسور و شرایط محیطی را بررسی کنید |
| fan | Fan Trip | Latch | خرابی فن خنککننده | فن خراب یا کانکتور قطع شده | فن و کانکتور را بررسی و در صورت نیاز تعویض کنید |
| pid | Pre-PID Fail | Latch | خطای عملکرد pre-PID | فیدبک PID کمتر از مقدار تعیینشده است | تنظیمات AP.34 تا AP.36 و ورودی فیدبک را بررسی کنید |
| xbr | Ext-Brake | Latch | فعال شدن خطای ترمز خارجی | عملکرد نامناسب ترمز خارجی | ورودی ترمز و پارامتر Ad.41 را بررسی کنید |
| sfb | Safety B Err | Latch | خطا در ورودی ایمنی B | ایراد در ورودی ایمنی B | سیمکشی و وضعیت ورودی ایمنی را چک کنید |
| sfa | Safety A Err | Latch | خطا در ورودی ایمنی A | ایراد در ورودی ایمنی A | سیمکشی و وضعیت ورودی ایمنی را چک کنید |
| lcr | Lost Command | Level | از بین رفتن فرمان Run یا فرکانس | از بین رفتن فرمان از منبع خارجی | کابل، شبکه کنترل و منبع فرمان را بررسی کنید |
| iot | IO Board Trip | Latch | اشکال در برد I/O یا کارت ارتباطی | قطع یا خرابی فیزیکی کارت I/O | اتصال فیزیکی و سلامت کارت را بررسی کنید |
| par | ParaWrite Trip | Latch | خطا هنگام نوشتن پارامتر | اتصال نامناسب کابل ارتباطی | کابل ارتباطی و اتصال کیپد را بررسی کنید |
| opt | Option Trip-1 | Latch | خطای ارتباط بین اینورتر و کارت آپشن | اشکال در کارت آپشن یا نصب نادرست | کارت آپشن و نحوه نصب آن را بررسی کنید |
🛠️ اگر به خدمات تخصصی تعمیر درایو یا تست سیستم نیاز دارید، تیم الکترومارکت آماده ارائه خدمات است.
جدول کامل کدهای هشدار اینورتر LS S100
| کد هشدار | عنوان روی نمایشگر | شرح هشدار | علت یا شرایط ایجاد | راهحل پیشنهادی |
|---|---|---|---|---|
| olw | Over Load | هشدار اضافهبار موتور | بار موتور وارد محدوده هشدار اضافهبار شده | بار را کاهش دهید؛ تنظیمات Pr.17 و خروجی هشدار را بررسی کنید |
| ulw | Under Load | هشدار کمباری موتور | بار موتور کمتر از حد مورد انتظار است | بار واقعی سیستم و پارامتر Pr.25 را بررسی کنید |
| iolw | INV Over Load | هشدار نزدیک شدن اینورتر به محدوده اضافهبار | اینورتر به محدوده حرارتی اضافهبار نزدیک شده | بار را کاهش دهید؛ تهویه و شرایط محیطی را بررسی کنید |
| lcw | Lost Command | هشدار از دست رفتن فرمان | فرمان از منبع خارجی ناپایدار یا قطع شده | کابلها، PLC، کارت ارتباطی و تنظیمات منبع فرمان را بررسی کنید |
| fanw | Fan Warning | هشدار مشکل در فن خنککننده | عملکرد فن دچار اختلال شده | فن و پارامتر Pr.79 را بررسی کنید |
| eran | Fan Exchange | هشدار رسیدن زمان تعویض فن | عمر فن به پایان نزدیک شده است | فن خنککننده را تعویض کنید |
| dbw | DB Warn %ED | هشدار افزایش درصد استفاده از مقاومت ترمز | مصرف ترمز بیشتر از حد تنظیمشده است | مقاومت ترمز، Duty Cycle و پارامتر Pr.66 را چک کنید |
| trer | Retry Tr Tune | هشدار خطا در تنظیم ثابت زمانی روتور | عملیات Auto Tune روتور با خطا مواجه شده | تنظیمات موتور و مقدار Dr.9 را بررسی کنید |
| slp | PID Sleep | ورود PID به حالت Sleep | شرایط فرآیند باعث فعال شدن حالت Sleep شده | پارامترهای PID و منطق کنترل را بررسی کنید |
جدول عیبیابی مشکلات رایج اینورتر LS S100
| مشکل | علتهای احتمالی | راهحل پیشنهادی |
|---|---|---|
| موتور نمیچرخد | منبع فرمان اشتباه است، RUN صادر نشده، برق ورودی قطع است، سیمکشی کنترل اشتباه است، فرکانس مرجع کمتر از حداقل است، موتور قفل است، بار زیاد است | منبع فرمان Run و فرکانس را بررسی کنید، ورودی R/S/T و خروجی U/V/W را چک کنید، سیمکشی کنترل را اصلاح کنید، بار را کاهش دهید |
| موتور برعکس میچرخد | ترتیب فاز خروجی اشتباه است، فرمان Forward/Reverse برعکس سیمبندی شده | ترتیب فاز U/V/W یا سیمکشی فرمان را اصلاح کنید |
| موتور فقط در یک جهت میچرخد | جلوگیری از چرخش معکوس فعال است، سیگنال جهت معکوس دریافت نمیشود | تنظیم Reverse Prevention و ورودی فرمان را بررسی کنید |
| موتور بیش از حد داغ میشود | بار زیاد است، دمای محیط بالا است، تهویه ضعیف است، فن موتور مشکل دارد | بار را کاهش دهید، زمان شتاب/کاهش سرعت را اصلاح کنید، تهویه و فن موتور را بررسی کنید |
| موتور در زمان شتابگیری یا زیر بار میایستد | بار خیلی زیاد است | بار را کاهش دهید یا از موتور/اینورتر قویتر استفاده کنید |
| موتور شتاب نمیگیرد یا شتاب خیلی کند است | مرجع فرکانس پایین است، بار زیاد است، زمان شتاب طولانی تنظیم شده، گشتاور راهاندازی کم است | مرجع فرکانس، پارامترهای موتور، زمان شتاب و سطح Stall Prevention را بررسی کنید |
| سرعت موتور نوسان دارد | تغییرات بار زیاد است، ولتاژ ورودی ناپایدار است، رزونانس رخ داده است | منبع تغذیه را پایدار کنید، تنظیم فرکانس خروجی را اصلاح کنید، در صورت نیاز تجهیزات قویتر انتخاب کنید |
| رفتار موتور با تنظیمات همخوان نیست | الگوی V/F نامناسب تنظیم شده |
الگوی V/F را متناسب با موتور تنظیم کنید |
| زمان توقف موتور زیاد است | تنظیم Decel نامناسب است، گشتاور کافی نیست، بار زیاد است | زمان کاهش سرعت و ظرفیت اینورتر/موتور را بررسی کنید |
| عملکرد در بار سبک مناسب نیست | فرکانس کریر بالا است، تنظیم V/F یا Torque Boost مناسب نیست |
Carrier Frequency را کاهش دهید و Torque Boost را اصلاح کنید |
| سیستم کنترل در زمان کار اینورتر دچار نویز میشود | نویز سوئیچینگ اینورتر به سیستم کنترل منتقل میشود | Carrier Frequency را کاهش دهید و فیلتر مناسب نصب کنید |
| کلید نشتی زمین عمل میکند | جریان نشتی زمین زیاد است، ارت نامناسب است، کابل موتور بلند است | ارت را اصلاح کنید، Carrier Frequency را کم کنید، کابل موتور را کوتاهتر کنید |
| موتور شدید میلرزد | ولتاژ ورودی نامتعادل است، عایق موتور مشکل دارد | ولتاژ فازها و وضعیت عایقی موتور را بررسی کنید |
| موتور صدای غیرعادی یا هوم دارد | رزونانس بین موتور و فرکانس خروجی یا کریر رخ داده | Carrier Frequency را تغییر دهید و از Frequency Jump استفاده کنید |
| موتور دچار Hunting میشود | نویز روی فرمان آنالوگ وجود دارد، کابل موتور خیلی بلند است | فیلتر ورودی آنالوگ را تنظیم کنید و طول کابل را کاهش دهید |
| موتور بعد از قطع خروجی کاملاً متوقف نمیشود | ترمز DC بهدرستی تنظیم نشده | پارامترهای DC Braking را اصلاح کنید |
| فرکانس خروجی به مقدار مرجع نمیرسد | فرکانس در محدوده Jump است، Upper Limit پایین است، Stall Prevention فعال شده | محدوده Jump و Upper Limit را بررسی کنید، در صورت نیاز بار را کاهش دهید |
| فن خنککننده نمیچرخد | تنظیمات کنترل فن اشتباه است | پارامتر کنترل فن را بررسی کنید |
- مشاوره تخصصی رایگان: تیم مجرب مهندسان الکترومارکت آماده ارائه مشاورههای فنی دقیق برای انتخاب دقیقترین و مناسبترین درایو بر اساس مشخصات آسانسور شما هستند.
- تأمین و فروش: الکترومارکت تضمین میکند که شما درایو ال اس S100اصلی و با کیفیت را با بهترین قیمت و در کوتاهترین زمان ممکن دریافت خواهید کرد.
- پشتیبانی فنی و خدمات پس از فروش: حتی پس از خرید، میتوانید روی پشتیبانی فنی و خدمات پس از فروش ما برای نصب، راهاندازی، عیبیابی و رفع مشکلات احتمالی حساب کنید.
- منابع آموزشی و مقالات تخصصی: برای گسترش دانش خود در زمینه درایوها، PLC ها، HMI ها و دیگر تجهیزات صنعتی، میتوانید به طور منظم به وبلاگ الکترومارکت سر بزنید و از مقالات آموزشی ما بهرهمند شوید.
 تماس با ما – الکترومارکت
تماس با ما – الکترومارکت الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست.
الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست. دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷
دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷  تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴
تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴ وبسایت:
وبسایت:  در دسترس برای مشاوره رایگان
در دسترس برای مشاوره رایگان