درایو V1000 یاسکاوا yaskawa + راهنمای کاربردی آن به زبان فارسی بخش دوم
Guide to using the yaskawa V1000 drive part2
درایو v1000 یاسکاوا
سلام خدمت دوستان عزیز الکترومارکتی
در قسمت قبل سعی کردیم سخت افزار درایو v1000 یاسکاوا و بعضی از پارامترها رو توضیح دهیم و در این مقاله این بحث رو کامل میکنیم.
مرجع فرمان درایو v1000 یاسکاوا
در جدول زیر ، روشهای انتخابی برای مرجع فرمان درایو نشان داده شدهاند که در پارامتر b1-02 تنظیم میشوند.
| گزینه | پارامتر |
| 0= فرمان حرکت و توقف توسط کلیدهای Run و Stop روی صفحهکلید درایو صادر میشود. |
b1-02 |
| 1= فرمان حرکت توسط ورودیهای دیجیتال که برای عملکرد forward و
Reverse تنظیم میشوند، صادر میگردد. |
|
| 2= فرمان حرکت توسط ارتباط سریال Memobusصادر میشود. | |
| 3= فرمان حرکت و توقف توسط کارت توسعه دریافت میشود. |
روش توقف موتور
پارامتر b1-03 روش توقف موتور را پس از اینکه فرمان توقف صادر شد ، تعیین میکند.
| گزینه | پارامتر |
| 0= توقف از طریق کاهش سرعت و شتاب منفی | b1-03 |
| 1= توقف بر اساس اینرسی بار که در این حالت ارتباط درایو با موتور قطع میشود و موتور بر اساس اینرسی بار و بر اثر اصطکاک متوقف میشود.این روش برای فنها مناسب است |
|
| 2= توقف از طریق ترمز –که در این روش یک جریان dcبه سیمپیچهای موتور تزریق میشود تا موتور را متوقف سازد. | |
| 3= توقف بر اساس اینرسی بار و موتور که در یک زمان محدود توسط تایمر مشخص میشود | |
| 9= توقف بر اساس یک موقعیتیابی ساده |
پارامترهای ترمز dc درایو v1000 یاسکاوا
پارامترهای b2-01 تا b2-04 ترمز dc را کنترل میکنند.
در ابتدای شروع حرکت موتور و در انتهای آن در زمانی که سرعت موتور کاملاً کم میشود، میتوان با استفاده از تزریق جریان dc در سیمپیچهای موتور از حرکت روتور ممانعت کرد.
جریان DC باید برای مدت محدودی اعمال شود و نباید خیلی طولانی باشد.
معمولاً زمان یک ثانیه در ابتدای حرکت و یک ثانیه در انتهای توقف ، کافی است.
| توضیحات | پارامتر |
| فرکانس موتور در زمان توقف آن برای شروع تزریق dc | b2-01 |
| مقدار % جریان تزریقی به موتور نسبت به جریان نامی درایو | b2-02 |
| طول مدت تزریق جریان dcدر ابتدای حرکت | b2-03 |
| طول مدت تزریق جریان dcدر ابتدای حرکت | b2-04 |
برای فعال شدن ترمز dcباید پارامتر 2 یا b2-03=0 باشد.
پارامترهای Speed Search درایو v1000 یاسکاوا
پارامترهای گروه b3 به تابع speed مربوط میشوند.
درایو بر اساس این تابع میتواند سرعت موتور را شناسایی و برآورد کند و از همان سرعت شناسایی شده ادامه افزایش یا کاهش دور را ادامه دهد.
اسپید سرچ چیست؟
در مورد این تابع میتوان یک فن را مثال زد قبل از استارت موتور فن به حالت لخت در حالت چرخش است و این چرخش حاصل گردش هوا در پرههای فن است.
در بعضی از مواقع این گردش و اینرسی عدد بالایی دارد که اگر مد Speed Search غیرفعال باشد بعد از استارت اینورتر سعی میکند دور موتور را از فرکانس صفر شروع کند.
این عامل باعث افزایش جریان بالایی میشود اما در حالت فعال بودن مد Speed Search درایو سرعت چرخش موتور را محاسبه میکند و از اون سرعت به بعد ادامه کار میدهد.
قابلیت Speed Search در اکثر درایوهای حرفهای وجود دارد.
| توضیحات | پارامتر |
| فعال یا غیرفعال کردن تابع speed search در هنگام استارت | b3-01 |
| درصد جریان خروجی درایو نسبت به جریان نامی درایو در پایان جستوجو | b3-02 |
| طول مدت کاهش سرعت برای تابع speed search | b3-03 |
| طول مدت تأخیر در شروع تابع پس از قطع برق به صورت آنی | b3-05 |
| ضریب مربوط به جریان واردشده به موتور برای شروع برآورد سرعت | b3-06 |
| ضریب جبران برای سرعت برآورد شده | b3-10 |
| جستوجوی سرعت در هر دو جهت را فعال میکند. | b3-14 |
| درصد جریان در حالتی که تابع جستوجوی سرعت دوباره شروع میشود | b3-17 |
| مدت زمان تابع جستوجوی سرعت در حالت شروع مجدد جستوجو | b3-18 |
| تعداد دفعات شروع مجدد جستجوی سرعت | b3-19 |
| تعیین روش جستوجوی سرعت | b3-24 |
| مدت زمان وقفه بین جستجوهای تکراری | b3-25 |
پارامترهای کنترل PID درایو v1000 یاسکاوا
در گروه پارامترهای b5 میتوانید مقادیر مربوط به کنترلر PID را تنظیم کنید.
| توضیحات | پارامتر |
| فعال یا غیرفعال کردن PID | b5-01 |
| بهره تناسبی P | b5-02 |
| طول مدت انتگرال | b5-03 |
| محدود کردن حداکثر خروجی PID | b5-04 |
| مشتق زمانی | b5-05 |
| محدود کردن خروجی PID | b5-06 |
| تنظیم آفست برای PID | b5-07 |
| مقدار ثابت زمانی فیلتر خروجی PID | b5-08 |
| مشخص نمودن پلاریتۀ خروجی PID | b5-09 |
| ضریب خروجی PID | b5-10 |
| عملکرد درایو در مقابل خروجی PIDهمراه با پلاریته معکوس | b5-11 |
| عملکرد درایو در زمان از بین رفتن سیگنال فیدبک | b5-12 |
| میزان سطح فیدبک برای شناسایی از بین رفتن فیدبک | b5-13 |
| طول مدت تأخیر پس از بین رفتن سیگنال فیدبک | b5-14 |
| فرکانس شروع تابع ) Sleepبرای پمپهای آب( | b5-15 |
| طول مدت تأخیر برای تابع SLEEP | b5-16 |
| شتاب مثبت و منفی برای PID صورت پذیرد | b5-17 |
| فعال یا غیرفعال کردن یک مقدار به عنوان set point | b5-18 |
| مقدار set pointبرای PID | b5-19 |
| تعیین واحد برای set point | b5-20 |
| محدود کردن کمترین خروجی PID | b5-34 |
| محدود کردن مقدار ورودی برای PID | b5-35 |
| تعیین بیشترین سطح برای فیدبک PID | b5-36 |
| تعیین مدت زمان بیشترین فیدبک PID | b5-37 |
| نوع نمایش مقدار set point | b5-38 |
| تعداد ارقام برای نمایش set point | b5-39 |
تابع Dwell
پارامترهای گروه b6 در انتخاب و تنظیم تابع Dwell بکار میروند.
بر اساس این تابع ، زمانی که سرعت موتور از کمترین مقدار به بیشترین مقدار در حال افزایش است، در فرکانس خاصی که در b6-01 تنظیم میشود برای مدت b6-02 ثابت میماند و سرعت آن پس از زمان اندکی، دوباره افزایش مییابد.
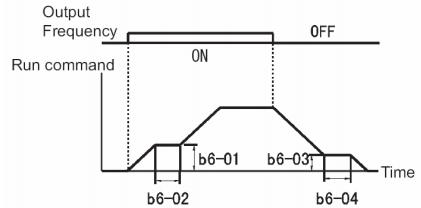
در زمان کاهش سرعت نیز چنین حالتی را داریم.
| توضیحات | پارامتر |
| فرکانس Dwell در زمانی که سرعت موتور بعد از استارت افزایش مییابد | b6-01 |
| مدت زمان قرارگیری در فرکانس Dwell در حین استارت | b6-02 |
| فرکانس Dwell در زمان کاهش سرعت در حین توقف | b6-03 |
| مدت زمان قرارگیری در فرکانس b6-03 در زمان کاهش سرعت | b6-04 |
صرفهجویی در مصرف انرژی
پارامترهای گروه b8 برای تنظیم اقدامات صرفهجویی در مصرف انرژی مورد استفاده قرار میگیرند.
به عنوان مثال یک فن دمنده را در نظر بگیرید.
سرعت موتور این فن در زمانی که در حال کار است، تابعی از فرکانس خروجی درایو میباشد.
اگر فرکانس را ثابت در نظر بگیریم و ولتاژ کاری فن را کاهش دهیم، بازهم موتور فن، با همان سرعت اما با جریان مصرفی کمتری کار خواهد کرد، این یک مثال ساده از صرفهجویی در مصرف انرژی است.
| توضیحات | پارامتر |
| فعال یا غیرفعال کردن صرفهجویی در مصرف انرژی | b8-01 |
| ضریب صرفهجویی در حالت کنترل برداری | b8-02 |
| ثابت زمانی فیلتر | b8-03 |
| ضریب صرفهجویی در حالت v/f | b8-04 |
| مدتزمان فیلتر شناسایی قدرت و توان | b8-05 |
| محدود کردن ولتاژ برای جستجوی ولتاژ در حالت v/f | b8-06 |
پارامترهای مربوط به شتاب
پارامترهای موجود در گروههای C1 و C2 به تنظیم شتاب مثبت و شتاب منفی و شکل منحنی شتاب مربوط میباشند.
افزایش سرعت از یک فرکانس به فرکانس بالاتر را شتاب مثبت Acceleration و کاهش سرعت از یک مقدار به فرکانس پایینتر را شتاب منفی Deceleration مینامند .
| توضیحات | پارامتر |
| طول مدت شتاب مثبت 1 | C1-01 |
| طول مدت شتاب منفی 1 | C1-02 |
| طول مدت شتاب مثبت 2 | C1-03 |
| طول مدت شتاب منفی 2 | C1-04 |
| طول مدت شتاب مثبت 3 (برای موتور شماره 2) | C1-05 |
| طول مدت شتاب منفی 3 (برای موتور شماره 2) | C1-06 |
| طول مدت شتاب مثبت 4(برای موتور شماره 2) | C1-07 |
| طول مدت شتاب منفی 4 (برای موتور شماره 2) | C1-08 |
| طول مدت شتاب منفی برای حالت fast stop | C1-09 |
| تعیین مقدار واحد زمانی برای شتاب | C1-10 |
| تعیین فرکانسی که در آن نرخ شتاب 1 و 2 تغییر میکنند | C1-11 |
منحنی s- curve
پارامترهای گروه C2 به تنظیم منحنی s-curve مربوط میشوند.
| توضیحات | پارامتر |
| نرخ شتاب در آغاز شتاب مثبت (ثانیه) | C2-01 |
| نرخ شتاب در پایان شتاب مثبت (ثانیه) | C2-02 |
| نرخ شتاب در آغاز شتاب منفی (ثانیه) | C2-03 |
| نرخ شتاب در پایان شتاب منفی (ثانیه) | C2-04 |

منحنیهایی که به شکل s هستند ، نسبت به منحنیهای خطی حرکت یکنواخت تری را ایجاد میکنند.
جبران لغزش درایو v1000 یاسکاوا
پارامترهای گروه c3 برای جبران لغزش موتور مورد استفاده قرار میگیرند.
در موتورهای آسنکرون، سرعت روتور از سرعت میدان چرخشی استاتور کمتر است .
هرچقدر بار بر روی محور موتور افزایش یابد، مقدار لغزش نیز افزایش خواهد یافت.
| توضیحات | پارامتر |
| چه میزانی از فرکانس خروجی به عنوان جبران لغزش به کار میرود | C3-01 |
| تأخیر زمانی برای عملکرد جبران لغزش | C3-02 |
| محدود کردن جبران لغزش | C3-03 |
| فعال کردن جبران لغزش در حالت ژنراتوری | C3-04 |
| محدود کردن ولتاژ خروجی برای جبران لغزش | C3-05 |
جبران گشتاور درایو v1000 یاسکاوا
در منحنی v/f اگر مقدار ولتاژ کمی افزایش یابد ، جریان عبوری از موتور و گشتاور موتور نیز به همان نسبت افزایش خواهد یافت.
در برخی از موارد،بهتر است که گشتاور راهاندازی را بیشتر از گشتاور کار عادی موتور قرار دهیم.
همچنین در جاهایی که فاصله موتور تا درایو خیلی زیاد باشد،از این عملکرد برای جبران افت ولتاژ در کابل استفاده میشود.
| توضیحات | پارامتر |
| ضریب جبران گشتاور | C4-01 |
| زمان تأخیر برای جبران گشتاور (تأخیر 1) | C4-02 |
| درصد جبران گشتاور در حالت استارت راستگرد | C4-03 |
| درصد جبران گشتاور در حالت استارت چپگرد | C4-04 |
| زمان ثابت فیلتر جبران گشتاور | C4-05 |
| زمان تأخیر برای جبران گشتاور (تأخیر 2) | C4-06 |
عملکرد ASR
ASR یا عملکرد کنترل سرعت اتوماتیک با پارامترهای گروه c5 تنظیم میشود.
ASR در زمانی که از یکی از ورودیهای دیجیتال به عنوان انکودر فیدبک سرعت در حالت v/f استفاده میشود قابل استفاده است (H6-01=3).
| توضیحات | پارامتر |
| ضریب 1تناسبی ASR | C5-01 |
| طول مدت انتگرال 1برای ASR | C5-02 |
| ضریب 2تناسبی ASR | C5-03 |
| طول مدت انتگرال 2برای ASR | C5-04 |
| محدود کردن حداکثر ASR | C5-05 |
فرکانس سوئیچینگIGBT
پارامترهای گروه C6 برای تنظیم عملکرد فرکانس حامل بکار میروند.
| توضیحات | پارامتر |
| انتخاب بین دو حالت Normal و Heavy duty | C6-01 |
| انتخاب فرکانس حامل | C6-02 |
| حد بالای فرکانس حامل | C6-03 |
| حد پایین فرکانس حامل | C6-04 |
| بهره تناسبی برای فرکانس حامل | C6-05 |
فرکانس حامل ،فرکانس کلید زنی igbt ها است.
اگر این فرکانس را خیلی بالا انتخاب کنید ،igbt ها گرم میشوند.
اگر این فرکانس را خیلی پایین انتخاب کنید، موتور با صدای نویز کار میکند.
آن معمولاً برای درایوهای توان پایین ، روی 10 KHz و برای درایوهای بزرگتر بر روی 5KHz تنظیم میشود.
سرعت پلهای
پارامترهای گروه d1 برای معرفی 17 فرکانس کاری درایو مورد استفاده قرار میگیرند.
یکی از این فرکانسها (d1-17) فرکانس Jog است، و 16 فرکانس دیگر که از d1-01 تا d1-16 میباشد را میتوان توسط 4 ورودی دیجیتال،انتخاب کرد.
ورودیهای دیجیتال در بخش H1 تنظیم میشوند.
اگر 4 ورودی را به صورت Multi-Stop Reference تعریف کنید، فرکانس طبق جدول زیر انتخاب میشود.
| توضیحات | پارامتر |
| فرکانس 1 | d1-01 |
| فرکانس 2 | d1-02 |
| فرکانس 3 | d1-03 |
| فرکانس 4 | d1-04 |
| فرکانس 5 | d1-05 |
| فرکانس 6 | d1-06 |
| فرکانس 7 | d1-07 |
| فرکانس 8 | d1-08 |
| فرکانس 9 | d1-09 |
| فرکانس 10 | d1-10 |
| فرکانس 11 | d1-11 |
| فرکانس 12 | d1-12 |
| فرکانس 13 | d1-13 |
| فرکانس 14 | d1-14 |
| فرکانس 15 | d1-15 |
| فرکانس 16 | d1-16 |
| فرکانس jog | d1-17 |
| مرجع سرعت 1
چندمرحلهای |
مرجع سرعت 2
چندمرحلهای |
مرجع سرعت 3
چندمرحلهای |
مرجع سرعت 4
چندمرحلهای |
فرکانس انتخابی |
| فرکانس 1 | ||||
| 1 | فرکانس 2 | |||
| 1 | فرکانس 3 | |||
| 1 | فرکانس 4 | |||
| 1 | فرکانس 5 | |||
| 1 | 1 | فرکانس 6 | ||
| 1 | 1 | فرکانس 7 | ||
| 1 | 1 | 1 | فرکانس 8 | |
| 1 | فرکانس 9 | |||
| 1 | 1 | فرکانس 10 | ||
| 1 | 1 | فرکانس 11 | ||
| 1 | 1 | 1 | فرکانس 12 | |
| 1 | 1 | فرکانس 13 | ||
| 1 | 1 | 1 | فرکانس 14 | |
| 1 | 1 | 1 | فرکانس 15 | |
| 1 | 1 | 1 | 1 | فرکانس 16 |
محدود کردن فرکانسها
در گروه d2 پارامترهایی برای محدود کردن مقادیر فرکانسهای درایو وجود دارند.
اما مقادیر حداقل و حداکثر فرکانس و ولتاژ خروجی درایو در گروه E1 تنظیم میشوند و پارامترهای d2 نسبتی از مقادیر موجود در E1 میباشند.
| توضیحات | پارامتر |
| درصد حداکثر مقدار فرکانس مرجع نسبت به E1-04 | d2-01 |
| درصد حداقل مقدار فرکانس مرجع نسبت به E1-04 | d2-02 |
| درصد حداقل فرکانس مرجع در زمانی که یکی از ورودیهای آنالوگ برای تنظیم سرعت مورد استفاده قرار میگیرد. |
d2-03 |
فرکانسهای Jump
برخی ماشینها یا دستگاهها هستند که در یک فرکانس خاص دچار رزونانس میشوند.
این پدیده میتواند موجب لرزش موتور شود، به موتور آسیب بزند یا حتی از جای خودش جدا کند.
فرکانسهای Jump فرکانسهایی هستند که موتور یا مجموعه دستگاه در آن دچار رزونانس میشوند.
هنگامی که درایو به این فرکانسها میرسد سعی میکند تا در یک باند مجاز از این فرکانس دور شود و رزونانس را کاهش دهد.
d3-0≥ d3-02≥ d3-03
| توضیحات | پارامتر |
| فرکانس Jump شماره یک | d3-01 |
| فرکانس Jump شماره دو | d3-02 |
| فرکانس Jump شماره سه | d3-03 |
| محدوده باند مجاز برای فاصله گرفتن از فرکانس Jump | d3-04 |
پارامترهای موتور درایو v1000 یاسکاوا
گروه E به تنظیم منحنی v/f و وارد کردن پارامترهای موتور مربوط میباشد .
گروه E1 و E2 به موتور شماره یک، و گروه E3 و E4 به موتور شماره دو مربوط میشود.
در درایو V1000 و چندین مدل دیگر از درایوها ، اتصال موتورهای مختلف به یک درایو امکان پذیر است.
موتورها به طور جداگانه و توسط کنتاکتور ، به خروجی درایو متصل میشوند.
انتخاب موتور شماره یک یا دو، و یا تنظیمات یک و دو توسط یکی از ورودیهای دیجیتال که برای این کار برنامهریزی میشود، انجام میشود.
پارامترهای گروه E5 نیز با روتور آهنربای دائمی برای موتورهای سنکرون تنظیم میشود.
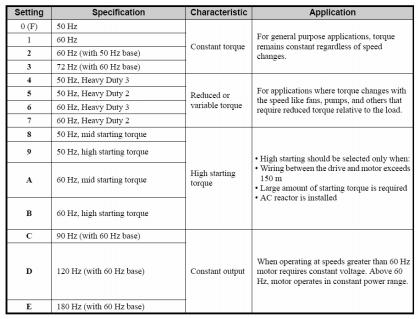
تنظیم منحنی v/f
با استفاده از پارامترهای گروه E1 میتوان منحنی v/f را برای موتور شماره یک تنظیم کرد.
شکل منحنی v/f دارای تأثیر زیادی بر عملکرد موتور و گشتاور خروجی درایو میباشد.
اگر E1-03 را بر روی F تنظیم کنید، میتوانید منحنی را خودتان تنظیم نمایید.
| توضیحات | پارامتر |
| مقدار ولتاژ ورودی درایو (برق شهر) | E1-01 |
| انتخاب نوع منحنی v/f | E1-03 |
| حداکثر فرکانس خروجی درایو | E1-04 |
| حداقل ولتاژ خروجی درایو | E1-05 |
| فرکانس برق ورودی درایو (برق شهر) | E1-06 |
| فرکانس حد واسط منحنی v/f | E1-07 |
| ولتاژ حد واسط منحنی v/f | E1-08 |
| حداقل فرکانس خروجی درایو | E1-09 |
| حداقل ولتاژ خروجی درایو | E1-10 |
| فرکانس حد واسط شماره 2در منحنی v/f | E1-11 |
| ولتاژ حد واسط شماره 2در منحنی v/f | E1-12 |
| ولتاژ برق ورودی درایو (برق شهر) | E1-03 |
اگر پارامترهای E1-01 تا E1-03 را در گروه E1 مقداردهی کنید، نیازی به تنظیم E1-4 تا E1-13 نیست.
اما اگر مقدار E1-03 را بر روی F تنظیم کنید، در این صورت باید مقادیر E1-04 تا E1-13 را مقداردهی نمایید.

پارامترهای موتور شماره یک
پارامترهای موتور آسنکرون شماره یک در گروه E2 جای دارند.
پارامترهای E2-01 تا E2-04 را از روی پلاک موتور بخوانید و وارد کنید.
پارامترهای E2-05 تا E2-12 نیز توسط اتوتیون محاسبه میشوند.
| توضیحات | پارامتر |
| جریان نامی موتور (A) | E2-01 |
| لغزش موتور در بار نامی (HZ) | E2-02 |
| جریان موتور در حالت بدون بار (A) | E2-03 |
| تعداد قطبهای موتور | E2-04 |
| مقاومت اهمی استاتور | E2-05 |
| اندوکتانس نشتی موتور | E2-06 |
| ضریب اشباع آهن (شماره یک) | E2-07 |
| ضریب اشباع آهن (شماره دو) | E2-08 |
| درصد تلفات مکانیکی موتور | E2-09 |
| میزان تلفات آهنی موتور (W) | E2-10 |
| توان نامی موتور (KW) | E2-11 |
| ضریب اشباع آهن (شماره سه) | E2-12 |
پارامترهای موتور PM
پارامترهای موتور PM که با نام موتور گیرلس یا موتور سنکرون با روتور آهنربای دائمی شناخته میشوند، در گروه E5 تنظیم میگردند.
| توضیحات | پارامتر |
| انتخاب یک موتور PMاز فهرست تولیدات یاسکاوا اگر میخواهید موتور دیگری را انتخاب میکنید، باید کد FFFF را وارد نمایید |
E5-01 |
| توان نامی موتور PM | E5-02 |
| جریان نامی موتورPM | E5-03 |
| تعداد قطبهای موتور | E5-04 |
| مقاومت اهمی استاتور | E5-05 |
| اندوکتانس محور d | E5-06 |
| اندوکتانس محور q | E5-07 |
| ثابت ولتاژ القایی 1 | E5-09 |
| ثابت ولتاژ القایی 2 | E5-24 |
ورودیهای دیجیتال
برای تنظیم عملکرد ورودیهای دیجیتال S1 تا S6 از پارامترهای گروه H1 استفاده میشود.
در پارامترهای H1-01 تا H1-06 میتوانید اعداد بین صفر تا 9F را وارد کنید که هر کدام از آنها عملکرد خاصی را برای آن ورودی دیجیتال، تعریف میکنند.
| مقدار پیشفرض | توضیح | پارامتر |
| 40= راستگرد | تعریف عملکرد ورودی دیجیتال S1 | H1-01 |
| 41= چپگرد | تعریف عملکرد ورودی دیجیتال S2 | H1-02 |
| 24= فالت خارجی | تعریف عملکرد ورودی دیجیتال S3 | H1-03 |
| 14= راهاندازی مجدد | تعریف عملکرد ورودی دیجیتال S4 | H1-04 |
| 3=1 سرعت چندمرحلهای | تعریف عملکرد ورودی دیجیتال S5 | H1-05 |
| 4=2 سرعت چندمرحلهای | تعریف عملکرد ورودی دیجیتال S6 | H1-06 |
در جدول زیر ، تعدادی از عملکردهای مهم و اعداد متناظر با آنها که در پارامترهای H1 وارد میشوند، نشان داده شده است.
| عملکرد | مقدار عددی H1 |
| انتخاب Local یا Remote | 1 |
| Multi Step Speed Reference 1 | 3 |
| Multi Step Speed Reference 2 | 4 |
| Multi Step Speed Reference 3 | 5 |
| Multi Step Speed Reference 4 | 32 |
| انتخاب Jog | 6 |
| بلا استفاده | F |
| راستگرد- حرکت | 40 |
| چپگرد- حرکت | 41 |
| تنظیم مجدد فالت | 14 |
| انتخاب بین موتور 1 یا 2 | 16 |
خروجیهای دیجیتال
پارامترهای گروه H2 برای تنظیم عملکرد خروجیهای دیجیتال P1 و P2، و رله خروجی درایو به کار میروند.
| مقدار پیشفرض | توضیحات | پارامتر |
| Fault =E | تعریف عملکرد خروجی رلهای MA-B-C | H2-01 |
| Run =0 | تعریف عملکرد خروجی ترانزیستوری P1 | H2-02 |
| 2= دستیابی به یک فرکانس خاص | تعریف عملکرد خروجی ترانزیستوری P2 | H2-03 |
در جدول زیر چند عملکرد مختلف که توسط پارامترهای H2 میتوانید انتخاب کنید، نشان داده شده است.
| عملکرد | مقدار عددی H2 |
| خروجی در زمان Run فعال میشود | |
| خروجی به محض رسیدن به فرکانس صفر، فعال میشود | 1 |
| سرعت درایو ، به مقدار نهایی رسیده است | 2 |
| درایو دارای هیچ فالتی نیست و میتواند کار کند | 6 |
| درایو دچار فالت شده است | E |
| خروجی بلا استفاده است | F |
| خروجی تایمر | 12 |
| موتور شماره 2 انتخاب شده است | 1C |
| درایو فعال شده و موتور آماده بهکار است | 38 |
ورودیهای آنالوگ
با استفاده از پارامترهای گروه H3، عملکرد ورودیهای آنالوگ را تنظیم کنید.
| توضیحات | پارامتر |
| تعیین سطح ولتاژ برای ورودی آنالوگ A1 | H3-01 |
| تعریف عملکرد ورودی آنالوگ A1 | H3-02 |
| ضریب برای ورودی آنالوگ A1 | H3-03 |
| مقدار بایاس برای ورودی آنالوگ A1 | H3-04 |
| تعیین سطح ولتاژ یا جریان ورودی آنالوگ A2 | H3-09 |
| تعریف عملکرد ورودی آنالوگ A2 | H3-10 |
| ضریب برای ورودی آنالوگ A2 | H3-11 |
| مقدار بایاس برای ورودی آنالوگ A2 | H3-12 |
| ثابت زمانی برای فیلتر ورودی آنالوگ | H3-13 |
درجدول زیر، چند نمونه از گزینههایی که در پارامترهای H3-02 و H3-10 میتوان انتخاب کرد، نشان داده شده است.
| توضیحات | مقدار انتخابی برای H3-10 و H3-02 |
| ورودیهای A1 یا A2 به عنوان فیدبک برای کنترلر PID بکار میروند | B |
| ورودیهای A1 یا A2 به عنوان set point برای کنترلر PID بکار میروند | C |
| ورودی برای دمای موتور و PTC | E |
| بلااستفاده | F |
خروجیهای آنالوگ
عملکرد خروجی آنالوگ AM از طریق پارامترهای گروه H4 تنظیم میشود.
| توضیحات | پارامتر |
| متغیری که توسط این خروجی نشان داده میشود را تعیین میکند | H4-01 |
| ضریب مربوط به خروجی آنالوگ AM | H4-02 |
| سطح صفر را برای متغیر خروجی تعیین میکند | H4-03 |
متغیرهای درایو در گروه U1 جای میگیرند.
مقادیر ولتاژ و فرکانس و جریان و توان و گشتاور و سرعت و … را میتوانید در این گروه مشاهده کنید.
هنگامی که میخواهید پارامتر H4-01 را تنظیم کنید، به عنوان مثال اگر قرار است فرکانس خروجی درایو را توسط خروجی آنالوگ AM نشان دهید باید مقدار عددی 102 را در پارامتر H4-01 وارد کنید، به دلیل اینکه فرکانس خروجی درایو در پارامتر U1-02 قرار دارد.
قطار پالس ورودی و خروجی
ترمینال RP به قطار پالس ورودی، و ترمینال MP به قطار پالس خروجی مربوط است.
پارامترهای گروه H6 برای تنظیم این دو ورودی و خروجی ، بکار میروند.
| توضیحات | پارامتر |
| 0= ورودی قطار پالس برای کنترل سرعت درایو بکار میرود | H6-01 |
| 1= ورودی قطار پالس RP به عنوان فیدبک PID مورد استفاده قرار میگیرد | |
| 2= ورودی قطار پالس RP به عنوان PID set point بکار میرود | |
| 3= ورودی قطار پالس به عنوان یک انکودر ساده بکار میرود | |
| مقیاس بندی ورودی RP قطار پالس | H6-02 |
| بهرۀ ورودی قطار پالس RP | H6-03 |
| بایاس ورودی قطار پالس RP | H6-04 |
| مدت زمان فیلتر برای ورودی قطار پالس RP | H6-05 |
| تعریف عملکرد خروجی قطار پالس MP | H6-06 |
| مقیاس بندی خروجی قطار پالس MP | H6-07 |
پارامترهای حفاظتی درایو v1000 یاسکاوا
پارامترهای گروه L برای حفاظت موتور و درایو مورد استفاده قرار میگیرد.
| توضیحات | پارامتر |
| تعیین نوع موتور و خنک شدن موتور برای خطای آوردلود حرارتی | L1-01 |
| طول مدت عملکرد خطای اضافهبار | L1-02 |
| تعیین عملکرد درایو پس از اعلام هشدار اضافه حرارت | L1-03 |
| تعیین عملکرد درایو پس از اعلام خطای اضافه حرارت | L1-04 |
| طول مدت فیلتر برای ورودی آنالوگ PTC | L1-05 |
| فعال یا غیرفعال کردن حفاظت آورلود حرارتی در زمان قطع آنی برق | L1-13 |
| عملکرد درایو در زمان قطع آنی برق ورودی | L2-01 |
| مدت زمان مجاز برای قطع لحظهای برق ورودی | L2-02 |
| مدت زمان لازم برای بازیابی ولتاژ پس از قطع لحظهای برق ورودی | L2-04 |
| کمترین مقدار ولتاژ باس dcبرای اعلام خطای کاهش ولتاژ | L2-05 |
| فعال یا غیرفعال کردن عملکرد جلوگیری از توقف موتور تحت آورلود در زمان شتاب مثبت | L3-01 |
| درصد جریان مجاز برای عملکرد Stall Preventation در زمان شتاب مثبت | L3-02 |
| درصد حداقل میزان جریان در زمان شتاب مثبت برای جلوگیری از توقف موتور | L3-03 |
| فعال یا غیرفعال کردن Stall Preventation در زمان شتاب منفی | L3-04 |
| فعال یا غیرفعال کردن Stall Preventation در زمان کار عادی | L3-05 |
| درصد جریان مجاز برای Stall Preventation در زمان کار عادی | L3-06 |
| فعال یا غیرفعال کردن جلوگیری از ایجاد خطای اضافه ولتاژ | L3-11 |
| مقدار ولتاژ باس dcدلخواه در زمان جلوگیری از خطای اضافه ولتاژ | L3-17 |
| تعداد دفعات ری استارت خودکار فالت | L5-01 |
| عملکرد رله خروجی فالت در زمان ری استارت اتوماتیک | L5-02 |
| طول مدت بین وقوع خطا تا تنظیم مجدد فالت بهطور خودکار | L5-04 |
| انتخاب نوع عملکرد برای تنظیم مجدد فالت بهطور خودکار | L5-05 |
| محدود کردن مقدار گشتاور در جهت راستگرد | L7-01 |
| محدود کردن مقدار گشتاور در جهت چپگرد | L7-02 |
| محدود کردن گشتاور در حالت ژنراتوری راستگرد | L7-03 |
| محدود کردن گشتاور در حالت ژنراتوری چپگرد | L7-04 |
| ثابت زمانی انتگرالی برای محدود کردن گشتاور | L7-06 |
| روش محدود کردن گشتاور در زمان شتاب مثبت و منفی | L7-07 |
| حفاظت از مقاومت ترمز داخلی درایو | L8-01 |
| مقدار اضافه حرارت درایو برای اعلام هشدار | L8-02 |
| عملکرد درایو در زمان اعلام هشدار اضافه حرارت درایو | L8-03 |
| حفاظت در برابر قطع فاز ورودی درایو | L8-05 |
| حفاظت در برابر قطع فاز خروجی درایو | L8-07 |
| فعال کردن خطای ارت فالت | L8-09 |
| تعیین شیوه عملکرد فن خنککننده درایو | L8-10 |
| طول مدت وقفه در هنگامی که فن خنککننده درایو متوقف شده باشد | L8-11 |
| تعیین دمای هوای محیطی که درایو در آن کار میکند | L8-12 |
| تعیین عملکرد خطای اضافه بار در سرعت پایین | L8-15 |
| فعال کردن خطای عدم توازن جریان خروجی | L8-29 |
| تعیین نوع نصب درایو در تابلو | L8-35 |
| فعال کردن کاهش فرکانس حامل در سرعت پایین | L8-38 |
| طول مدت کاهش فرکانس حامل پس از رسیدن به سرعت عادی | L8-40 |
| اعلام هشدار در زمان بیشتر شدن جریان خروجی درایو از %150 | L8-41 |
Hunting Prevention
زمانی که بار روی موتور کم باشد، احتمال لرزش موتور بیشتر میشود.
به منظور کاهش این لرزش، از عملکرد Hunting Prevention و از پارامترهای گروه n1 استفاده میشود.
| توضیحات | پارامتر |
| فعال یا غیرفعال کردن Hunting Prevention | n1-01 |
| ضریب عملکرد Hunting Prevention | n1-02 |
| ثابت زمانی | n1-03 |
| ضریب حرکت در جهت معکوس | n1-05 |
پارامترهای صفحهکلید و نمایشگر درایو v1000 یاسکاوا
پارامترهای گروه O1 و O2 و O4 به صفحه نمایشگر و صفحهکلید موجود روی درایو مربوط میشوند.
| توضیحات | پارامتر |
| در زمانی که برق ورودی درایو برقرار باشد،کدام پارامتر بر روی صفحهنمایش نشان داده شود | O1-02 |
| واحد اندازهگیری برای مقادیری که روی صفحه نشان داده میشوند | O1-03 |
| جایی که نقطه ممیز در صفحهنمایش قرار میگیرد . | O1-11 |
| فعال یا غیرفعال کردن کلید Local/Reset روی صفحهکلید | O2-01 |
| فعال یا غیرفعال کردن کلید stop روی صفحهکلید | O2-02 |
| تعیین عملکرد کلید Enter در زمان تنظیم فرکانس با استفاده از این کلید. | O2-05 |
| عملکرد درایو برای حذف صفحهکلید از روی درایو | O2-06 |
| جهت چرخش موتور در زمانی که برای کنترل موتور از صفحهکلید استفاده میشود | O2-07 |
| تعیین نقطه بهکارگیری درایو بعضی پارامترها تغییر خواهند کرد. | O2-09 |
اتوتیون موتور توسط درایو v1000 یاسکاوا
برخی از پارامترهای موتور بر روی پلاک موتور قابل مشاهده است، اما میتوان برخی دیگر را از طریق اتوتیون به دست آورد.
درایو میتواند به وسیله اتوتیون، مقاومت اهمی سیم پیچها ،اندوکتانس نشتی موتور، اندوکتانس اصلی موتور، نقاط اشباع در هسته آهنی و …. را محاسبه کند.
پارامترهای موجود در گروه T1 برای اتوتیون موتور بکار میروند.
| توضیح | پارامتر |
| انتخاب موتور شماره یک یا شماره دو برای اتوتیون | T1-00 |
| انتخاب نوع اتوتیون – گردان یا ساکن | T1-01 |
| توان نامی موتور (kw) | T1-02 |
| ولتاژ نامی موتور(V) | T1-03 |
| جریان نامی موتور (A) | T1-04 |
| فرکانس نامی موتور (Hz) | T1-05 |
| تعداد قطبهای موتور | T1-06 |
| سرعت نامی موتور (RPM) | T1-07 |
| میزان تلفات آهنی موتور | T1-11 |
پارامترهای Monitor درایو v1000 یاسکاوا
پارامترهای گروه U1 به نمایش مقادیر متغیرهای داخلی درایو مانند ولتاژ و جریان و فرکانس و توان و .. مربوط میشوند .
پارامترهای گروه U2 به وضعیت داخلی درایو در زمان وقوع آخرین فالت برای درایو مربوط میشوند.
پارامترهای گروه U3 سابقه چند فالت که برای درایو اتفاق افتاده را نشان میدهند.
پارامترهای گروه U4 به کارکرد درایو و سخت افزار آن مربوط میشوند و برای تعمیر و نگهداری درایو مورد استفاده قرار میگیرند.
در پارامترهای گروه U5، مقادیر متغیرهای PID قابلمشاهده هستند.
گروه U6،مقادیر متغیرهای کنترلر را نشان میدهد.
گروه U1
| توضیحات | پارامتر |
| نشاندهنده فرکانس مرجع است | U1-01 |
| نشاندهنده فرکانس خروجی درایو است | U1-02 |
| نشاندهنده جریان خروجی درایو است | U1-03 |
| نشاندهنده روش کنترلی انتخاب شده برای درایو است | U1-04 |
| نشاندهنده سرعت موتور است | U1-05 |
| نشاندهنده ولتاژ خروجی است | U1-06 |
| نشاندهنده ولتاژ باس dc است | U1-07 |
| نشاندهنده توان خروجی درایو است | U1-08 |
| نشاندهنده مقدار گشتاور مرجع است | U1-09 |
| نشاندهنده وضعیت ترمینالهای ورودی است | U1-10 |
| نشاندهنده وضعیت رله و ترانزیستور های خروجی است | U1-11 |
| وضعیت داخلی درایو | U1-12 |
| ولتاژ ورودی آنالوگ A1 | U1-13 |
| جریان یا ولتاژ آنالوگ ورودی A2 | U1-14 |
| فرکانس خروجی پس از استارت نرم | U1-16 |
| کد خطای OPE | U1-18 |
| کد خطای ارتباط سریال Modbus | U1-19 |
| تعداد پالسهای ورودی قطار پالس RP | U1-24 |
گروه U2
| توضیحات | پارامتر |
| فالت کنونی درایو | U2-01 |
| فالت قبلی درایو | U2-02 |
| فرکانس مرجع برای فالت قبلی | U2-03 |
| فرکانس خروجی درایو برای فالت قبلی | U2-04 |
| جریان خروجی درایو در حالت فالت قبلی | U2-05 |
| سرعت موتور در حالت فالت قبلی | U2-06 |
| ولتاژ خروجی درایو در حالت فالت قبلی | U2-07 |
| ولتاژ باس dc در حالت فالت قبلی | U2-08 |
| توان خروجی درایو در حالت فالت قبلی | U2-09 |
| وضعیت ترمینالهای دیجیتال ورودی در حالت فالت قبلی | U2-11 |
| وضعیت ترمینالهای دیجیتال خروجی در حالت فالت قبلی | U2-12 |
| مدت زمان کارکرد درایو در زمان وقوع فالت قبلی | U2-14 |
گروه U4
| توضیحات | پارامتر |
| کل زمان کارکرد درایو | U4-01 |
| تعداد دفعات کارکرد درایو | U4-02 |
| مدت زمان کارکرد فن خنککننده درایو | U4-03 |
| درصد عمر خازن | U4-05 |
| درصد عمر igbt | U4-07 |
گروه U5
| توضیحات | پارامتر |
| نشاندهنده مقدار فیدبک PID است | U5-01 |
| نشاندهنده مقدار ورودی PID است | U5-02 |
| نشاندهنده مقدار خروجی PID است | U5-03 |
| نشاندهنده مقدار set point برای PID است. | U5-04 |
با تشکر از مطالعه شما دوستان عزیز.
انتهای قسمت پایانی راهنمای فارسی درایو V1000 یاسکاوا yaskawa
با ما همراه باشید.
الکترومارکت مشاوره فروش نصب و تعمیر انواع اینورتر، سافت استارتر،درایو دی سی، اجرای انواع پروژه های اتوماسیون صنعتی





واقعا عالی بود،تشکر
بسیار عالی. کامل و جامع بود این مقاله ممنون میشم pdf ایمیل بشه واسم که بتونم بیشتر بهره ببرم
با سلام و خسته نباشید
مقاله جامع و مفیدی بود واقعا خسته نباشید فقط کاش pdfهم داشت ک بتونیم ازش استفاده کنیم
با تشکر
سلام واقعا عالی بود خسته نباشید
اگر میشد فایل pdf هر دو قسمت مقاله رو میذاشتید عالی بود
اقای خیلی عالی و خوب کامل توضیح دادین فقط ای کاش pdf جهت دانلود داشت ممنونم
سلام ممنون از مطلب کامل و پرمحتوای شما. امکان ارسال PDF و ذخیره کردنش رو هم لطفا بهش اضافه کنید .
سلام، خیلی عالی بود
میشه pdf مقاله رو برای من mail کنیدو ممنون میشم
سلام، لطفا pdfمقاله را برای بنده نیز ارسال فرمائید. با تشکر از توجه شما
سلام، پارامتر o2-09 ،بکارگیری درایو در کشورهای مختلف مثل چین و آمریکا و ژاپن و… را نشان میدهد. مگر چه تفاوتهایی در راه اندازی در نقاط مختلف می تواند وجود داشته باشد؟
بصورت پیش فرض در درایوی که کار می کردم چین انتخاب شده بود.زمانی که آن را به آمریکا تغییر دادم، دیگر نتوانستم پارامتر o2-09 را ببینم.
جناب مهندس رجبی عزیز لطفا راهنمایی بفرمائید.
واقعا عالی بود
توضیحات کامل و جامع بود
بسیار سپاس گذارم
فقط اگه pdf داشت که بشه ذخیره کرد خیلی بهتر بود
سلام باتشکر از دیدگاهتون .pdf مقاله را به ایمیلتان میفرستم.