عملکرد کنترل PID و توصیف ساده پی ای دی کنترل در الکترومارکت
PID control function and its simple description
چند مثال کاربردی
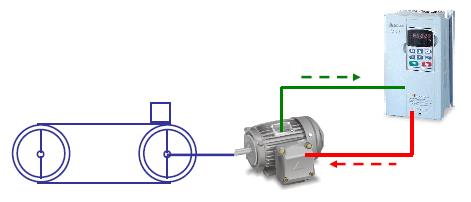
کنترل سرعت با استفاده از PID
Speed PID Control
کنترل سرعت با استفاده از PID CONTROL (کنترل PID)برای حفظ سرعت ثابت یک موتور صرفنظر از تغییر بار بر یک موتور مورد استفاده قرار میگیرد.
حسگر بازخورد یک انکودر متصل به کارت PG است که کنترل سرعت را برنامهریزی میکند.
در واقع کنترل سرعت و دقت در کنترل سرعت در مد کاری کلوز لوپ یا همان حلقه بسته درایو های فرکانسی نیز یک نوع PID پیشرفته است که در درایو های AC و همچنین در سروو موتور ها در مد پوزیشن کنترل استفاده میشود.
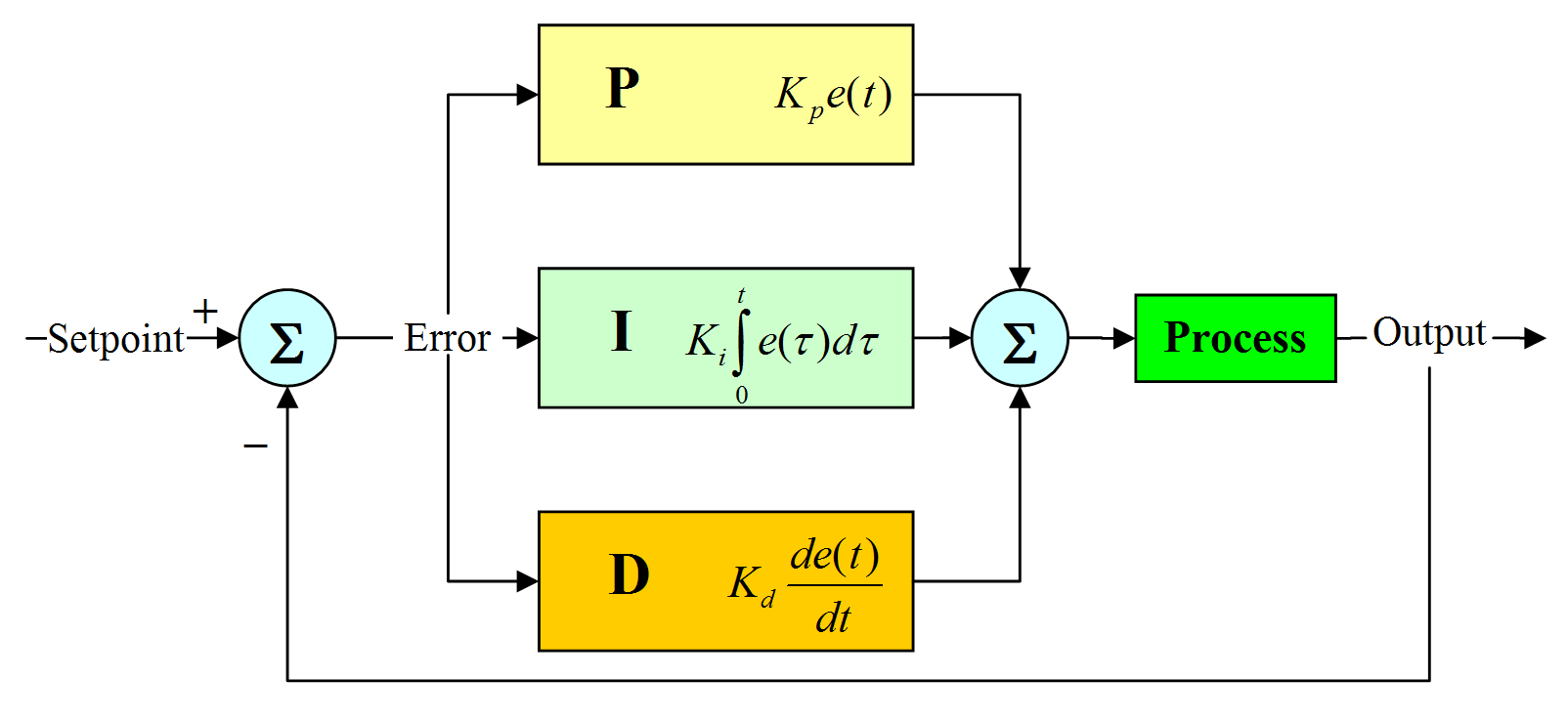
ویژگیهای کنترل PID
کنترل P:
میزان عملیات تولیدی را با انحراف متناسب میسازد.
اما شما نمیتوانید فقط با استفاده از کنترل P، انحراف را روی صفر تنظیم کنید.
کنترل I:
میزان عملیاتی را ایجاد میکند که با انحراف ترکیب میشود.
و برای هماهنگی مقدار بازخورد با مقدار هدف بکار میرود.
بههرحال، کنترل I برای تغییرات سریع مناسب نیست.
کنترل D:
میزان عملیاتی را ایجاد میکند که از انحراف به دست آمده باشد و میتواند بلافاصله نسبت به تغییرات سریع واکنش نشان دهد.
استفاده از کنترل PID
- روش ورودی مقدار هدف PID را انتخاب کنید
- روش ورودی بازخورد PID را انتخاب کنید
- بازخورد PID مثبت یا منفی را انتخاب کنید
- بهره PID را تنظیم کنید
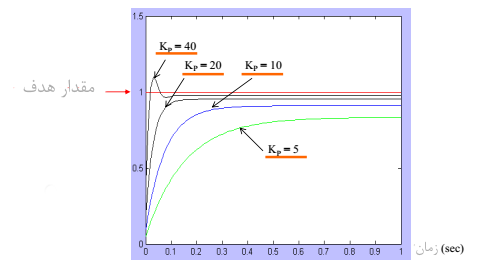
چگونگی تنظیم بهره P
بهره P یک مقدار متناسب است.
مقدار انحراف با نسبت فعالسازی سیستم کنترل افزایش خواهد یافت.
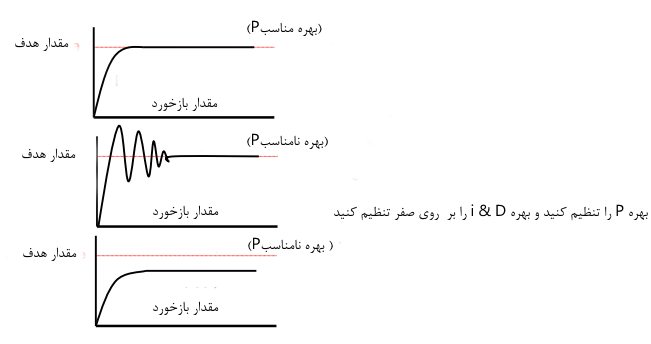
نتیجۀ تنظیم بهره P
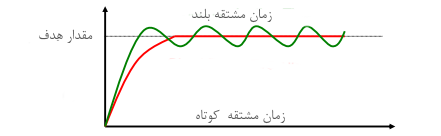
چگونگی تنظیم بهره D
اگر لرزش اتفاق بیفتد، در زمانی که سیکل لرزش کوتاه باشد، و این سیکل تقریباً با زمان مشتق یکسان باشد، عملکرد دیفرانسیل بسیار قدرتمند خواهد بود. کوتاه کردن زمان مشتق، لرزش را فرو مینشاند.
امیدوارم که مفید بوده باشه و سعی میکنم در روز های آینده مطالب ویژه تر و متفاوت تری براتون بزارم موفق و پیروز باشید.
محبت و دانش را به اشتراک بگذاریم
سلام لطفا اگر امکان داره مطلب فوق رو کاملا مفصل توضیح بدید چون در مورد تنظیم درایو های کنترل سرعت آسانسور بسیار بسیار کاربردی هست، ممنون
با سلام
با تشکر از مطلبی که به اشتراک گذاشتید
توضیحات ارائه شده می توانست بسیار دقیقتر ارائه گردد در گام اول برای تنظیم P توضیحات خوب بود اما در گامهای بعدی خیر . اینکه در گام بعدی سایر ضرایب باید در چه وضعیتی باشند و … . همچنین گرافها دارای توضیحات مناسبی نبودند.
سلام و تبریک سال نو
از شما به خاطر مطلب مفید تان تشکر می کنم و از این مطلب استفاده کردم.و نحوه تنظیم ضریب p را یادگرفتم.
با خواندن این مطلب لذت بردم
می تونم از شما بخواهم که نحوه تنظیم این ضرایب i, d را و در حالت کلی الگوریتم و روش کلی برای بدست آوردن بهترین این ضرایب i,p,d برای یک سیستم را به صورت عملی بیان فرمایید.