
راهنمای جامع استفاده از درایو Yaskawa V1000: پارامترها و تنظیمات کلیدی
ارائه شده توسط الکترومارکت
درایو Yaskawa V1000 به عنوان یکی از محبوبترین اینورترها در صنعت، به دلیل انعطافپذیری و قابلیتهای بینظیرش، برای کاربردهای متنوعی از پمپ و فن گرفته تا نوار نقاله و جرثقیل ایدهآل است. اگر به دنبال بهینهسازی عملکرد سیستمهای خود هستید، این راهنما به شما کمک میکند تا با تمامی جنبههای این درایو Yaskawa V1000 آشنا شوید و تنظیمات آن را به بهترین شکل ممکن انجام دهید. برای مشاوره تخصصی و خرید درایو Yaskawa V1000، با الکترومارکت تماس بگیرید.
مدلها و کاربردهای درایو Yaskawa V1000
درایو Yaskawa V1000 در سه مدل اصلی عرضه میشود:
-
تکفاز 200 ولت: با توان 100 وات تا 400 وات.
-
سه فاز 200 ولت: با توان 100 وات تا 15 کیلووات.
-
سه فاز 400 ولت: با توان 200 وات تا 15 کیلووات.
این درایوها عمدتاً در حالت “حلقه باز” (Loop Open) کار میکنند و با هر دو نوع موتور آسنکرون و سنکرون سازگارند. از کاربردهای رایج آنها میتوان به موارد زیر اشاره کرد:
-
کنترل پمپ و فن
-
سیستمهای نوار نقاله و کمپرسور
-
بالابرها و قلابهای جرثقیل
برای درک عمیقتر کاربردهای اینورترها و انتخاب بهترین گزینه برای نیازهای شما، پیشنهاد میکنیم مقاله راهنمای انتخاب اینورتر مناسب را در وبلاگ الکترومارکت مطالعه کنید.
نگاهی به سختافزار درایو Yaskawa V1000
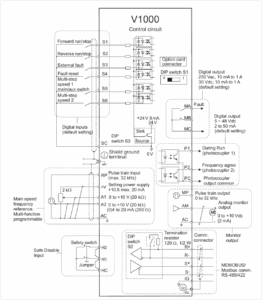
درایو Yaskawa V1000 با مجموعهای از ورودیها و خروجیهای کارآمد، طراحی شده تا حداکثر انعطافپذیری را در کنترل سیستمهای صنعتی ارائه دهد:
-
6 ورودی دیجیتال (1s تا 6s): برای دریافت فرمانهای مختلف.
-
1 ورودی قطار پالس: جهت اندازهگیری دقیق سرعت (مانند اتصال به انکودر).
-
2 ورودی آنالوگ: برای سیگنالهای کنترلی آنالوگ.
-
1 خروجی رلهای و 2 خروجی دیجیتال ترانزیستوری کلکتور باز: برای کنترل دستگاههای خارجی.
-
1 خروجی آنالوگ و 1 خروجی قطار پالس: جهت مانیتورینگ و فیدبک.
نکته مهم: دو ورودی 1H و 2H برای قطع اضطراری ارتباط موتور با IGBT تعبیه شدهاند. اگر از این قابلیت استفاده نمیکنید، حتماً 1H و 2H را به HC جمپر کنید تا IGBT فعال شود.
ورودی RP (قطار پالس ورودی) نیز قابلیتهای ویژهای دارد؛ مثلاً میتوانید آن را به یک انکودر ساده متصل کنید (با تنظیم H6-01=03) تا به عنوان فیدبک سرعت موتور عمل کند.

کار با کیپد درایو Yaskawa V1000
صفحه کلید درایو Yaskawa V1000 شامل یک نمایشگر LED پنج رقمی، هشت کلید کنترلی و چهار چراغ LED کوچک است. کلیدهای Run و Stop برای راهاندازی و توقف موتور به صورت مستقیم از روی کیپد استفاده میشوند.
در ادامه، عملکرد سایر کلیدها را مشاهده میکنید:
|
کلید |
عملکرد |
|
Reset |
برای ریست کردن خطاها؛ در حین تنظیم پارامترها، برای حرکت کرسر به سمت راست. |
|
Lo/RE |
انتخاب بین حالت Local (کنترل از طریق کیپد) یا Remote (کنترل از طریق ترمینالهای درایو). |
|
∧ (جهت بالا) |
حرکت بین پارامترها و افزایش مقادیر. |
|
∨ (جهت پایین) |
حرکت بین پارامترها و کاهش مقادیر. |
|
Enter |
انتخاب حالت، انتخاب پارامتر و ذخیره تغییرات. |
|
Esc |
بازگشت به منوی قبلی. |
نحوه ناوبری در منوها:
پس از روشن شدن درایو، نمایشگر 0.00F را نشان میدهد. با استفاده از کلیدهای ∧ یا ∨ میتوانید در منوهای مختلف حرکت کنید:
-
FOR/REV: جهت چرخش موتور را نمایش میدهد.
-
فرکانس خروجی/0.00: فرکانس فعلی خروجی (در حال کار) یا صفر (در حالت توقف).
-
جریان خروجی: جریان مصرفی موتور.
-
ولتاژ خروجی: ولتاژ اعمال شده به موتور.
-
Mon: ورود به منوی Monitor برای مشاهده پارامترهای
1-01Uتا8-10U(شامل مقادیر متغیرها، تاریخچه خطاها و اطلاعات درایو). -
Verify: نمایش پارامترهایی که مقادیرشان با تنظیمات پیشفرض کارخانه تفاوت دارند.
-
Setup: دسترسی به تنظیمات سریع برای راهاندازی.
-
PAr (Parameter): دسترسی کامل به تمامی پارامترهای تنظیمی درایو Yaskawa V1000.
-
ATun (Autotune): ورود به منوی اتوتیون موتور.

توجه داشته باشید: ویرایش پارامترها در منوهای Verify، Setup، Parameter و Autotune تنها زمانی امکانپذیر است که درایو متوقف باشد. اما میتوانید مقادیر Monitor (ولتاژ، جریان، فرکانس و…) را حتی در حین کار درایو نیز مشاهده کنید.
بازگشت به تنظیمات کارخانه در درایو Yaskawa V1000
برای بازگرداندن درایو Yaskawa V1000 به تنظیمات اولیه کارخانه، مراحل زیر را دنبال کنید:
-
وارد منوی PAr (Parameter) شوید.
-
پارامتر 1-03A را انتخاب و Enter کنید.
-
مقدار پیشفرض این پارامتر صفر است. عدد 2220 را وارد کرده و کلید Enter را فشار دهید.
-
پس از تکمیل فرآیند، تمامی پارامترها به مقادیر کارخانهای باز میگردند و مقدار 1-03A مجدداً به صفر تغییر میکند.
گروهبندی پارامترها در درایو Yaskawa V1000
یاسکاوا برای سهولت دسترسی، پارامترهای درایو Yaskawa V1000 را در گروههای مشخصی دستهبندی کرده است. در جدول زیر، نام و کاربرد هر گروه را مشاهده میکنید:
|
گروه پارامتر |
توضیح گروه |
|
A1 |
انتخاب روش کنترلی، نوع کاربرد، سطح دسترسی و پسورد درایو. |
|
2A |
تنظیم پارامترهای کاربری (User). |
|
1b |
تنظیم مرجع فرمان، مرجع سرعت، روش توقف و عملکردهای Local/Remote. |
|
2b |
تنظیمات مربوط به ترمز DC. |
|
3b |
تنظیمات مربوط به تابع Speed Search (جستجو و ردیابی سرعت). |
|
4b |
تنظیمات تایمرها. |
|
5b |
پارامترهای مربوط به کنترلکننده PID. |
|
6b |
فرکانس و مدت زمان حالت Dwell. |
|
8b |
تنظیمات مربوط به صرفهجویی در مصرف انرژی. |
|
1c |
تنظیم شتاب مثبت (Acc) و شتاب منفی (Dec). |
|
2c |
پارامترهای مرتبط با منحنی S-Curve. |
|
3c |
جبران لغزش موتور. |
|
4c |
جبران گشتاور موتور. |
|
6c |
تنظیمات فرکانس کریر (Carrier Frequency). |
|
1d |
تنظیم سرعتهای پلهای (Multi-step speeds). |
|
2d |
محدود کردن حداکثر و حداقل سرعت. |
|
3d |
تنظیم فرکانسهای Jump (برای جلوگیری از رزونانس). |
|
4d |
Hold کردن فرکانسهای درایو. |
|
7d |
تنظیم فرکانسهای Offset. |
|
1E |
الگوی منحنی F/V برای موتور 1. |
|
2E |
پارامترهای فنی موتور 1. |
|
5E |
تنظیمات مربوط به موتورهای سنکرون. |
|
6F |
پارامترهای کارت توسعه ارتباط سریال 1. |
|
7F |
پارامترهای کارت توسعه ارتباط سریال 2. |
|
1H |
تعریف عملکرد ورودیهای دیجیتال. |
|
2H |
تعریف عملکرد خروجیهای دیجیتال. |
|
3H |
تعریف عملکرد ورودیهای آنالوگ. |
|
4H |
تعریف عملکرد خروجیهای آنالوگ. |
|
5H |
پارامترهای ارتباط Modbus. |
|
6H |
تعریف ورودی و خروجیهای قطار پالس. |
|
1L |
پارامترهای حفاظت درایو و موتور. |
|
2L |
عملکرد درایو در زمان قطع لحظهای برق ورودی. |
|
3L |
پارامترهای مرتبط با Prevention Stall. |
|
4L |
پارامترهای تشخیص سرعت. |
|
5L |
ریست اتوماتیک خطاها. |
|
6L |
تشخیص اضافه گشتاور. |
|
8L |
حفاظت سختافزار. |
|
n1 |
Hunting Prevention (جلوگیری از لرزش). |
|
3n |
ترمز با لغزش زیاد. |
|
1O |
پارامترهای صفحه نمایش. |
|
2O |
فعال/غیرفعال کردن کلیدهای صفحه کلید. |
|
3O |
پارامترهای مربوط به کپی کردن پارامترها. |
|
1U |
نمایش وضعیت ترمینالها، ولتاژ، جریان، سرعت و… |
|
2U |
نمایش وضعیت درایو در زمان آخرین فالت. |
|
3U |
تاریخچه فالتهای درایو. |
|
4U |
نمایش وضعیت کارکرد درایو و فن. |
|
5U |
نمایش وضعیت مقادیر PID. |
برای اطلاعات بیشتر در مورد هر یک از این پارامترها و نحوه تنظیم آنها، میتوانید به مقالات تخصصیتر در وبلاگ الکترومارکت مراجعه نمایید.
انتخاب کاربرد در درایو Yaskawa V1000
درایو Yaskawa V1000 به شما اجازه میدهد تا کاربرد خاص خود (مانند پمپ، فن، جرثقیل و…) را از طریق پارامتر 1-06A انتخاب کنید. با این کار، چندین پارامتر دیگر به صورت خودکار برای آن کاربرد بهینه میشوند.
|
گزینه ها |
پارامتر |
|
00= کاربرد عمومی |
A1-06 |
|
01= پمپ تأمین آب |
|
|
02= نوار نقاله |
|
|
03= فن دمنده هوا |
|
|
04= فن سیستم HVAC |
|
|
05= کمپرسور |
|
|
06= قلاب جرثقیل – بالابر |
|
|
07= حرکت طولی یا عرضی جرثقیل |
|
|
08= نوار نقاله 2 |
|
|
15= تنظیمات اختیاری |
به عنوان مثال، اگر پارامتر 1-06A را روی 03= فن دمنده تنظیم کنید، نرمافزار “Yaskawa Drive Wizard” به صورت خودکار مقادیر پارامترهای 1-04b، 6-01c، 1-07E، 1-08E و 2-01L را تغییر میدهد. انتخاب 06= قلاب جرثقیل و بالابر نیز تغییرات بیشتری را اعمال میکند، از جمله تغییر پارامتر 1-02A از حالت F/V به کنترل برداری حلقه باز. برای دریافت مشاوره تخصصی در انتخاب و تنظیم درایو Yaskawa V1000 برای کاربردهای خاص، میتوانید با کارشناسان الکترومارکت تماس بگیرید.
روشهای کنترلی در درایو Yaskawa V1000
پارامتر 1-02A نوع روش کنترلی درایو Yaskawa V1000 را تعیین میکند:
-
روش F/V: (فرکانس به ولتاژ) – الگوی منحنی در گروه 1E تنظیم میشود. مناسب برای پمپ، فن، کمپرسور، و کاربردهایی که چندین موتور به صورت موازی به یک درایو متصل هستند.
-
روش کنترل برداری حلقه باز (Vector Control): مناسب برای بالابر و قلاب جرثقیل.
-
روش کنترل برداری حلقه باز برای موتور PM سنکرون: برای موتورهای سنکرون با روتور آهنربای دائمی.
پارامترهای گروه A
|
پارامتر |
توضیح پارامتر |
|
1-01A |
تعیین سطح دسترسی به پارامترهای درایو. |
|
1-02A |
انتخاب روش کنترلی درایو. |
|
1-03A |
بازگشت به تنظیمات کارخانه. |
|
1-04A |
پسورد درایو در اینجا ثبت میشود. |
|
1-05A |
وارد کردن پسورد. |
|
1-06A |
انتخاب نوع کاربرد درایو. |
|
A2-01 تا A2-32 |
پارامترهای کاربری (User Parameters). |
پارامترهای گروه 1b
این گروه به تنظیم مرجع فرمان، مرجع سرعت، روش توقف موتور، و عملکرد Local/Remote میپردازد.
|
پارامتر |
توضیح پارامتر |
|
1-01b |
مرجع تعیین سرعت (اول). |
|
1-02b |
مرجع فرمان درایو (اول). |
|
1-03b |
روش توقف موتور. |
|
1-04b |
فعال یا غیرفعال کردن حرکت در جهت معکوس. |
|
1-08b |
فعال یا غیرفعال کردن فرمان در زمان پارامتردهی. |
|
1-14b |
انتخاب چرخش فازها. |
|
1-15b |
مرجع تعیین سرعت در حالت Local (دوم). |
|
1-16b |
مرجع فرمان درایو در حالت Local (دوم). |
|
1-17b |
فعال یا غیرفعال بودن حرکت موتور پس از قطع و وصل برق. |
مرجع تعیین سرعت 1
پارامتر 1-01b چگونگی تعیین سرعت درایو را مشخص میکند:
|
گزینه |
پارامتر b1-01 |
|
0= سرعتهای حافظه |
استفاده از سرعتهای تنظیم شده در پارامترهای |
|
1= ورودیهای آنالوگ |
تعیین سرعت با ورودیهای آنالوگ |
|
2= ارتباط سریال |
تعیین سرعت از طریق ارتباط سریال Memobus. |
|
3= برد توسعه |
تعیین سرعت از طریق برد توسعه. |
|
4= ورودی قطار پالس |
تعیین سرعت از طریق ورودی قطار پالس ترمینال RP. |
اگر 1-01b را روی صفر تنظیم کنید، سرعت از طریق ورودیهای دیجیتال (که به عنوان Multi-step Speed Reference تنظیم شدهاند) انتخاب میشود. 16 سرعت از 1-01d تا 1-16d و یک سرعت Jog (با 1-17d) قابل انتخاب هستند.
مرجع فرمان درایو
پارامتر 1-02b روش دریافت فرمان حرکت و توقف درایو را تعیین میکند:
|
گزینه |
پارامتر b1-02 |
|
0= کلیدهای کیپد |
فرمان حرکت و توقف از طریق کلیدهای Run و Stop روی صفحه کلید درایو صادر میشود. |
|
1= ورودیهای دیجیتال |
فرمان حرکت از طریق ورودیهای دیجیتال (تنظیم شده برای Forward و Reverse). |
|
2= ارتباط سریال |
فرمان حرکت از طریق ارتباط سریال Memobus. |
|
3= کارت توسعه |
فرمان حرکت و توقف از طریق کارت توسعه دریافت میشود. |
روش توقف موتور
پارامتر 1-03b نحوه توقف موتور را پس از صدور فرمان توقف مشخص میکند:
|
گزینه |
پارامتر b1-03 |
|
0= کاهش سرعت |
توقف با کاهش سرعت و شتاب منفی. |
|
1= اینرسی بار |
توقف بر اساس اینرسی بار (ارتباط درایو با موتور قطع میشود و موتور به دلیل اصطکاک میایستد). مناسب برای فنها. |
|
2= ترمز DC |
توقف با تزریق جریان DC به سیمپیچهای موتور. |
|
3= اینرسی زمانبندی شده |
توقف بر اساس اینرسی بار و موتور در یک زمان محدود (تعیین شده توسط تایمر). |
|
9= موقعیتیابی ساده |
توقف بر اساس موقعیتیابی ساده. |
پارامترهای ترمز DC
پارامترهای 2-01b تا 2-04b برای کنترل عملکرد ترمز DC استفاده میشوند. این قابلیت، با تزریق جریان DC به سیمپیچهای موتور در ابتدای حرکت و در انتهای توقف، مانع از حرکت روتور میشود. مدت زمان تزریق باید محدود باشد (معمولاً یک ثانیه در ابتدا و یک ثانیه در انتها کافی است).
|
پارامتر |
توضیح پارامتر |
|
2-01b |
فرکانس موتور در زمان توقف برای شروع تزریق DC. |
|
2-02b |
مقدار % جریان تزریقی به موتور نسبت به جریان نامی درایو. |
|
2-03b |
مدت زمان تزریق جریان DC در ابتدای حرکت. |
|
2-04b |
مدت زمان تزریق جریان DC در زمان توقف. |
برای فعال کردن ترمز DC، پارامتر 2-03b باید برابر با 2 یا باشد.
پارامترهای Speed Search
گروه 3b شامل پارامترهای مربوط به تابع Speed Search است. این تابع به درایو امکان میدهد تا سرعت موتور را قبل از شروع کار تخمین بزند.
|
پارامتر |
توضیح پارامتر |
|
3-01b |
فعال یا غیرفعال کردن تابع Speed Search در زمان استارت. |
|
3-02b |
% جریان خروجی درایو (نسبت به جریان نامی) برای پایان جستجو. |
|
3-03b |
مدت زمان کاهش سرعت برای تابع Speed Search. |
|
3-05b |
مدت زمان تأخیر در شروع تابع، پس از قطع لحظهای برق. |
|
3-06b |
ضریب جریان اعمالی به موتور برای شروع تخمین سرعت. |
|
3-10b |
ضریب جبران برای سرعت تخمینی. |
|
3-14b |
فعال کردن جستجو و ردیابی سرعت در هر دو جهت. |
|
3-17b |
% جریان در حالتی که تابع جستجو و ردیابی سرعت، از نو شروع میشود. |
|
3-18b |
مدت زمان تابع جستجو و ردیابی سرعت در حالت شروع مجدد. |
|
3-19b |
تعداد دفعات شروع مجدد جستجوی سرعت. |
|
3-24b |
انتخاب روش جستجو و ردیابی سرعت. |
|
3-25b |
مدت وقفه بین جستجوهای تکراری. |
پارامترهای کنترل PID
مقادیر مربوط به کنترلکننده PID (تناسبی-انتگرالی-مشتقی) در گروه پارامترهای 5b تنظیم میشوند.
|
پارامتر |
توضیح پارامتر |
|
5-01b |
فعال یا غیرفعال کردن کنترل PID. |
|
5-02b |
بهره تناسبی (P). |
|
5-03b |
مدت زمان انتگرال. |
|
5-04b |
محدود کردن حداکثر خروجی انتگرالی. |
|
5-05b |
مدت زمان مشتقی. |
|
5-06b |
محدود کردن خروجی PID. |
|
5-07b |
تنظیم آفست برای PID. |
|
5-08b |
ثابت زمانی فیلتر خروجی PID. |
|
5-09b |
تعیین پلاریته برای خروجی PID. |
|
5-10b |
ضریب برای خروجی PID. |
|
5-11b |
عملکرد درایو در برابر خروجی PID با پلاریته معکوس. |
|
5-12b |
عملکرد درایو در زمانی که سیگنال فیدبک از بین میرود. |
|
5-13b |
مقدار سطح فیدبک برای تشخیص گم شدن فیدبک. |
|
5-14b |
مدت زمان تأخیر پس از گم شدن سیگنال فیدبک. |
|
5-15b |
فرکانس شروع تابع Sleep (برای پمپهای آب). |
|
5-16b |
مدت زمان تأخیر برای تابع Sleep. |
|
5-17b |
اعمال شتاب مثبت و منفی برای PID. |
|
5-18b |
فعال یا غیرفعال کردن یک مقدار به عنوان Set Point. |
|
b5-19 |
مقدار Set Point برای PID. |
|
5-20b |
انتخاب واحد برای مقدار Set Point. |
|
5-34b |
محدود کردن حداقل خروجی PID. |
|
5-35b |
محدود کردن مقدار ورودی برای PID. |
|
5-36b |
تعیین سطح حداکثری برای فیدبک PID. |
|
5-37b |
تعیین مدت زمان برای حداکثر فیدبک PID. |
|
5-38b |
نوع نمایش مقدار Set Point. |
|
5-39b |
تعداد ارقام برای نمایش Set Point. |
تابع Dwell در درایو Yaskawa V1000
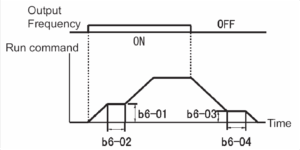
پارامترهای گروه 6b برای تنظیم تابع Dwell به کار میروند. این تابع باعث میشود که درایو در یک فرکانس خاص (که در 6-01b تنظیم میشود) برای مدت زمان 6-02b ثابت بماند، سپس به افزایش یا کاهش سرعت خود ادامه دهد. این پدیده هم در زمان افزایش سرعت و هم در زمان کاهش سرعت اتفاق میافتد.
|
پارامتر |
توضیح پارامتر |
|
6-01b |
فرکانس Dwell در زمان افزایش سرعت موتور پس از استارت. |
|
6-02b |
مدت زمان باقی ماندن در فرکانس Dwell در استارت. |
|
6-03b |
فرکانس Dwell در زمان کاهش سرعت در زمان توقف. |
|
6-04b |
مدت زمان باقی ماندن در فرکانس |
صرفهجویی در مصرف انرژی با درایو Yaskawa V1000
با پارامترهای گروه 8b میتوانید عملکرد صرفهجویی در مصرف انرژی را در درایو Yaskawa V1000 فعال کنید. به عنوان مثال، در یک فن دمنده، با کاهش ولتاژ خروجی در فرکانس ثابت، میتوانید همان سرعت را با جریان مصرفی کمتر حفظ کنید، که منجر به صرفهجویی در انرژی میشود. الکترومارکت خدمات بهینهسازی مصرف انرژی در سیستمهای صنعتی را نیز ارائه میدهد.
|
پارامتر |
توضیح پارامتر |
|
8-01b |
فعال یا غیرفعال کردن صرفهجویی در مصرف انرژی. |
|
8-02b |
ضریب صرفهجویی در حالت کنترل برداری. |
|
8-03b |
ثابت زمانی فیلتر. |
|
8-04b |
ضریب صرفهجویی در حالت F/V. |
|
8-05b |
مدت زمان فیلتر تشخیص قدرت و توان. |
|
8-06b |
محدود کردن ولتاژ برای جستجوی ولتاژ در حالت F/V. |
پارامترهای شتاب در درایو Yaskawa V1000
گروههای 1c و 2c به تنظیم شتاب مثبت (Acceleration) و شتاب منفی (Deceleration) و شکل منحنی شتاب میپردازند. شتاب مثبت به افزایش سرعت و شتاب منفی به کاهش سرعت اشاره دارد.
|
پارامتر |
توضیح پارامتر |
|
1-01C |
مدت زمان شتاب مثبت 1. |
|
1-02C |
مدت زمان شتاب منفی 1. |
|
1-03C |
مدت زمان شتاب مثبت 2. |
|
1-04C |
مدت زمان شتاب منفی 2. |
|
1-05C |
مدت زمان شتاب مثبت 3 (برای موتور شماره 2). |
|
1-06C |
مدت زمان شتاب منفی 3 (برای موتور شماره 2). |
|
1-07C |
مدت زمان شتاب مثبت 4 (برای موتور شماره 2). |
|
1-08C |
مدت زمان شتاب منفی 4 (برای موتور شماره 2). |
|
1-09C |
مدت زمان شتاب منفی برای حالت Stop Fast. |
|
1-10C |
انتخاب واحد زمانی برای شتاب. |
|
1-11C |
تعیین فرکانسی که در آن، نرخ شتاب 1 و 2، تعویض میگردد. |
پارامترهای گروه 2C برای تنظیم منحنی S-Curve استفاده میشوند. منحنیهای S شکل، حرکت نرمتری را نسبت به منحنیهای خطی ارائه میدهند.
|
پارامتر |
توضیح پارامتر |
|
2-01C |
نرخ شتاب در ابتدای شتاب مثبت (ثانیه). |
|
2-02C |
نرخ شتاب در انتهای شتاب مثبت (ثانیه). |
|
2-03C |
نرخ شتاب در ابتدای شتاب منفی (ثانیه). |
|
2-04C |
نرخ شتاب در انتهای شتاب منفی (ثانیه). |
جبران لغزش در درایو Yaskawa V1000
گروه 3c شامل پارامترهای جبران لغزش موتور است. در موتورهای آسنکرون، با افزایش بار، لغزش موتور (اختلاف بین سرعت روتور و سرعت میدان گردان استاتور) افزایش مییابد. این پارامترها به جبران این لغزش کمک میکنند.
|
پارامتر |
توضیح پارامتر |
|
3-01C |
درصد فرکانس خروجی که به عنوان جبران لغزش به کار میرود. |
|
3-02C |
تأخیر زمانی برای عملکرد جبران لغزش. |
|
3-03C |
محدود کردن جبران لغزش. |
|
3-04C |
فعال کردن جبران لغزش در حالت ژنراتوری. |
|
3-05C |
محدود کردن ولتاژ خروجی برای جبران لغزش. |
جبران گشتاور در درایو Yaskawa V1000
با پارامترهای گروه 4c میتوان گشتاور موتور را جبران کرد. افزایش ولتاژ در منحنی F/V باعث افزایش جریان و گشتاور موتور میشود. این قابلیت در کاربردهایی که نیاز به گشتاور راهاندازی بالا دارند یا در مواقعی که به دلیل کابلکشی طولانی افت ولتاژ داریم، مفید است.
|
پارامتر |
توضیح پارامتر |
|
4-01C |
ضریب جبران گشتاور. |
|
4-02C |
تأخیر زمانی برای جبران گشتاور (تأخیر 1). |
|
4-03C |
% جبران گشتاور در حالت استارت راستگرد. |
|
4-04C |
% جبران گشتاور در حالت استارت چپگرد. |
|
4-05C |
ثابت زمانی فیلتر جبران گشتاور. |
|
4-06C |
تأخیر زمانی برای جبران گشتاور (تأخیر 2). |
عملکرد ASR
ASR یا کنترل سرعت اتوماتیک، در گروه 5c قابل تنظیم است. این عملکرد زمانی استفاده میشود که از یکی از ورودیهای دیجیتال به عنوان فیدبک سرعت انکودر در حالت F/V استفاده میکنید (مثلاً با تنظیم H6-01=03).
|
پارامتر |
توضیح پارامتر |
|
5-01C |
ضریب 1 تناسبی ASR. |
|
5-02C |
مدت زمان انتگرال 1 برای ASR. |
|
5-03C |
ضریب 2 تناسبی ASR. |
|
5-04C |
مدت زمان انتگرال 2 برای ASR. |
|
5-05C |
محدود کردن حداکثر ASR. |
فرکانس سوئیچینگ IGBT در درایو Yaskawa V1000
پارامترهای گروه 6C برای تنظیم فرکانس کریر (Carrier Frequency) به کار میروند. این فرکانس، سرعت کلیدزنی IGBTها را کنترل میکند. انتخاب فرکانس بالا میتواند منجر به داغ شدن IGBTها و انتخاب فرکانس پایین باعث نویز موتور شود. به طور معمول، برای درایوهای کمقدرت 10KHz و برای درایوهای بزرگتر 5KHz توصیه میشود. برای تهیه انواع قطعات الکترونیک صنعتی، از جمله IGBT، به بخش محصولات در الکترومارکت مراجعه کنید.
|
پارامتر |
توضیح پارامتر |
|
6-01C |
انتخاب بین دو حالت Normal و Heavy Duty. |
|
6-02C |
انتخاب فرکانس کریر. |
|
6-03C |
حد بالای فرکانس کریر. |
|
6-04C |
حد پایین فرکانس کریر. |
|
6-05C |
بهره تناسبی برای فرکانس کریر. |
سرعتهای پلهای در درایو Yaskawa V1000
پارامترهای گروه 1d برای تعریف 17 فرکانس کاری درایو (سرعتهای پلهای) استفاده میشوند. 1-17d فرکانس Jog است و 16 فرکانس دیگر (1-01d تا 1-16d) توسط 4 ورودی دیجیتال (که در بخش 1H به عنوان Reference Stop-Multi تعریف شدهاند) قابل انتخاب هستند.
|
پارامتر |
توضیح پارامتر |
|
1-01d |
فرکانس 1 |
|
1-02d |
فرکانس 2 |
|
1-03d |
فرکانس 3 |
|
1-04d |
فرکانس 4 |
|
1-05d |
فرکانس 5 |
|
1-06d |
فرکانس 6 |
|
1-07d |
فرکانس 7 |
|
1-08d |
فرکانس 8 |
|
1-09d |
فرکانس 9 |
|
1-10d |
فرکانس 10 |
|
1-11d |
فرکانس 11 |
|
1-12d |
فرکانس 12 |
|
1-13d |
فرکانس 13 |
|
1-14d |
فرکانس 14 |
|
1-15d |
فرکانس 15 |
|
1-16d |
فرکانس 16 |
|
d1-17 |
فرکانس Jog |
|
Multi-step Speed Ref 1 |
Multi-step Speed Ref 2 |
Multi-step Speed Ref 3 |
Multi-step Speed Ref 4 |
فرکانس انتخابی |
|
فرکانس 1 |
||||
|
1 |
فرکانس 2 |
|||
|
1 |
فرکانس 3 |
|||
|
1 |
1 |
فرکانس 4 |
||
|
1 |
فرکانس 5 |
|||
|
1 |
1 |
فرکانس 6 |
||
|
1 |
1 |
فرکانس 7 |
||
|
1 |
1 |
1 |
فرکانس 8 |
|
|
1 |
فرکانس 9 |
|||
|
1 |
1 |
فرکانس 10 |
||
|
1 |
1 |
فرکانس 11 |
||
|
1 |
1 |
1 |
فرکانس 12 |
|
|
1 |
1 |
فرکانس 13 |
||
|
1 |
1 |
1 |
فرکانس 14 |
|
|
1 |
1 |
1 |
فرکانس 15 |
|
|
1 |
1 |
1 |
1 |
فرکانس 16 |
محدود کردن فرکانسها در درایو Yaskawa V1000
پارامترهای گروه 2d برای محدود کردن مقادیر فرکانس درایو به کار میروند. لازم به ذکر است که مقادیر حداقل و حداکثر فرکانس و ولتاژ خروجی اصلی درایو در گروه 1E تنظیم میشوند و پارامترهای 2d نسبتی از این مقادیر اصلی هستند.
|
پارامتر |
توضیح پارامتر |
|
2-01d |
% حداکثر فرکانس مرجع نسبت به |
|
2-02d |
% حداقل فرکانس مرجع نسبت به |
|
d2-03 |
% حداقل فرکانس مرجع، هنگامی که یکی از ورودیهای آنالوگ برای تنظیم سرعت استفاده میشود. |
فرکانسهای Jump در درایو Yaskawa V1000
برخی ماشینآلات در فرکانسهای خاصی دچار رزونانس یا تشدید میشوند که میتواند به موتور آسیب برساند. فرکانسهای Jump، فرکانسهایی هستند که درایو از آنها اجتناب میکند. هنگامی که درایو به این فرکانسها نزدیک میشود، در یک باند مجاز، سرعت را تغییر میدهد تا رزونانس کاهش یابد (شرط: d3-01 ≥ d3-02 ≥ d3-03).
|
پارامتر |
توضیح پارامتر |
|
3-01d |
فرکانس Jump شماره یک. |
|
3-02d |
فرکانس Jump شماره دو. |
|
3-03d |
فرکانس Jump شماره سه. |
|
3-04d |
محدوده باند مجاز برای دور شدن از فرکانس Jump. |
پارامترهای موتور در درایو Yaskawa V1000
گروه E به تنظیم منحنی F/V و وارد کردن پارامترهای موتور اختصاص دارد. 1E و 2E برای موتور شماره یک، و 3E و 4E برای موتور شماره دو هستند. درایو Yaskawa V1000 این قابلیت را دارد که به چند موتور مختلف متصل شود (موتورها به صورت جداگانه و با کنتاکتور به خروجی درایو وصل میشوند). انتخاب بین موتورها یا تنظیمات مربوط به آنها توسط یکی از ورودیهای دیجیتال انجام میشود. پارامترهای گروه 5E نیز برای موتورهای سنکرون با روتور آهنربای دائمی (PM) تنظیم میگردند.
تنظیم منحنی F/V
با استفاده از پارامترهای گروه 1E، میتوانید منحنی F/V (فرکانس به ولتاژ) را برای موتور شماره یک تنظیم کنید. شکل این منحنی تأثیر زیادی بر عملکرد و گشتاور خروجی درایو دارد. اگر پارامتر 1-03E را روی F تنظیم کنید، میتوانید منحنی را به صورت دستی تنظیم نمایید.
|
پارامتر |
توضیح پارامتر |
|
1-01E |
مقدار ولتاژ ورودی درایو (برق شهر). |
|
1-03E |
انتخاب نوع منحنی F/V. |
|
1-04E |
ماکسیمم فرکانس خروجی درایو. |
|
1-05E |
ماکسیمم ولتاژ خروجی درایو. |
|
1-06E |
فرکانس برق ورودی درایو (برق شهر). |
|
1-07E |
فرکانس نقطه وسط منحنی F/V. |
|
1-08E |
ولتاژ نقطه وسط منحنی F/V. |
|
1-09E |
حداقل فرکانس خروجی درایو. |
|
1-10E |
حداقل ولتاژ خروجی درایو. |
|
1-11E |
فرکانس نقطه وسط شماره 2 در منحنی F/V. |
|
1-12E |
ولتاژ نقطه وسط شماره 2 در منحنی F/V. |
|
1-13E |
ولتاژ برق ورودی درایو (برق شهر). |
نکته: اگر پارامترهای 1-01E تا 1-03E را مقداردهی کنید، نیازی به تنظیم 1-4E تا 1-13E نیست. اما اگر 1-03E روی F تنظیم شود، باید مقادیر 1-04E تا 1-13E را به صورت دستی وارد کنید.
پارامترهای موتور شماره یک (آسنکرون)
پارامترهای موتور آسنکرون شماره یک در گروه 2E قرار دارند. مقادیر 2-01E تا 2-04E را از پلاک موتور بخوانید و وارد کنید. مقادیر 2-05E تا 2-12E توسط فرآیند اتوتیون محاسبه خواهند شد.
|
پارامتر |
توضیح پارامتر |
|
2-01E |
جریان نامی موتور (A). |
|
2-02E |
لغزش موتور در بار نامی (Hz). |
|
2-03E |
جریان موتور در حالت بیباری (A). |
|
2-04E |
تعداد قطبهای موتور. |
|
2-05E |
مقاومت اهمی استاتور. |
|
2-06E |
اندوکتانس نشتی موتور. |
|
2-07E |
ضریب اشباع آهن (شماره یک). |
|
2-08E |
ضریب اشباع آهن (شماره دو). |
|
2-09E |
% تلفات مکانیکی موتور. |
|
2-10E |
مقدار تلفات آهنی موتور (W). |
|
2-11E |
توان نامی موتور (KW). |
|
2-12E |
ضریب اشباع آهن (شماره سه). |
پارامترهای موتور PM (Permanent Magnet)
پارامترهای مربوط به موتورهای PM (معروف به موتورهای گیرلس یا سنکرون با روتور آهنربای دائمی) در گروه 5E تنظیم میشوند.
|
پارامتر |
توضیح پارامتر |
|
E5-01 |
انتخاب یک موتور PM از لیست تولیدات یاسکاوا. برای موتورهای دیگر، کد FFFF را وارد کنید. |
|
5-02E |
توان نامی موتور PM. |
|
5-03E |
جریان نامی موتور PM. |
|
5-04E |
تعداد قطبهای موتور. |
|
5-05E |
مقاومت اهمی استاتور. |
|
5-06E |
اندوکتانس محور d. |
|
5-07E |
اندوکتانس محور q. |
|
5-09E |
ثابت ولتاژ القایی 1. |
|
5-24E |
ثابت ولتاژ القایی 2. |
ورودیهای دیجیتال در درایو Yaskawa V1000
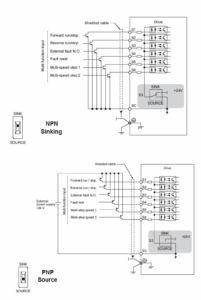
با پارامترهای گروه 1H، عملکرد ورودیهای دیجیتال 1S تا 6S را تعریف میکنید. میتوانید اعدادی بین صفر تا F9 را در پارامترهای 1-01H تا 1-06H وارد کنید که هر یک عملکرد خاصی را به آن ورودی اختصاص میدهند.
|
پارامتر |
توضیح پارامتر |
مقدار پیش فرض |
|
1-01H |
تعریف عملکرد ورودی دیجیتال 1S |
40= راستگرد |
|
1-02H |
تعریف عملکرد ورودی دیجیتال 2S |
41= چپگرد |
|
1-03H |
تعریف عملکرد ورودی دیجیتال 3S |
24= فالت خارجی |
|
1-04H |
تعریف عملکرد ورودی دیجیتال 4S |
14= ریست |
|
H1-05 |
تعریف عملکرد ورودی دیجیتال S5 |
3 = Multi Step Speed 1 |
|
H1-06 |
تعریف عملکرد ورودی دیجیتال S6 |
4 = Multi Step Speed 2 |
جدول زیر، برخی از مهمترین عملکردها و کدهای متناظر آنها را برای پارامترهای 1H نشان میدهد:
|
عملکرد |
مقدار عددی درون 1H |
|
انتخاب Local یا Remote |
1 |
|
Multi Step Speed Reference 1 |
3 |
|
Multi Step Speed Reference 2 |
4 |
|
Multi Step Speed Reference 3 |
5 |
|
Multi Step Speed Reference 4 |
32 |
|
انتخاب Jog |
6 |
|
بدون استفاده |
F |
|
راستگرد – حرکت |
40 |
|
چپگرد – حرکت |
41 |
|
ریست نمودن فالت |
14 |
|
انتخاب بین موتور 1 یا 2 |
16 |
خروجیهای دیجیتال در درایو Yaskawa V1000
پارامترهای گروه 2H برای تنظیم عملکرد خروجیهای دیجیتال 1P و 2P و همچنین رله خروجی درایو مورد استفاده قرار میگیرند.
|
پارامتر |
توضیح پارامتر |
مقدار پیش فرض |
|
H2-01 |
تعریف عملکرد رله خروجی MA-B-C |
E = Fault |
|
2-02H |
تعریف عملکرد خروجی ترانزیستوری 1P |
0 = Run |
|
2-03H |
تعریف عملکرد خروجی ترانزیستوری 2P |
2 = رسیدن به یک فرکانس خاص |
در جدول زیر، چندین عملکرد مختلف که میتوانید توسط پارامترهای 2H انتخاب کنید، آورده شده است:
|
عملکرد |
مقدار عددی درون 2H |
|
خروجی در زمان Run فعال میگردد |
|
|
خروجی به محض رسیدن به فرکانس صفر، فعال میگردد |
1 |
|
سرعت درایو، به مقدار نهایی رسیده است. |
2 |
|
درایو هیچ فالتی ندارد و آماده به کار است |
6 |
|
درایو دچار فالت شده است. |
E |
|
خروجی بدون استفاده است |
F |
|
خروجی تایمر |
12 |
|
موتور شماره 2 انتخاب شده است |
C1 |
|
درایو فعال شده و موتور آماده حرکت است. |
38 |
ورودیهای آنالوگ در درایو Yaskawa V1000
با استفاده از پارامترهای گروه 3H، عملکرد ورودیهای آنالوگ را در درایو Yaskawa V1000 تنظیم کنید.
|
پارامتر |
توضیح پارامتر |
|
3-01H |
تعیین سطح ولتاژ برای ورودی آنالوگ 1A. |
|
3-02H |
تعریف عملکرد ورودی آنالوگ 1A. |
|
3-03H |
ضریب برای ورودی آنالوگ 1A. |
|
3-04H |
مقدار بایاس برای ورودی آنالوگ 1A. |
|
3-09H |
تعیین سطح ولتاژ یا جریان ورودی آنالوگ 2A. |
|
3-10H |
تعریف عملکرد ورودی آنالوگ 2A. |
|
3-11H |
ضریب برای ورودی آنالوگ 2A. |
|
3-12H |
مقدار بایاس برای ورودی آنالوگ 2A. |
|
3-13H |
ثابت زمانی فیلتر برای ورودی آنالوگ. |
در جدول زیر، چند گزینه قابل انتخاب برای پارامترهای 3-02H و 3-10H آورده شده است:
|
توضیح |
مقدار انتخابی برای H3-02 و H3-10 |
|
ورودیهای 1A یا 2A به عنوان فیدبک برای کنترلر PID استفاده شود. |
B |
|
ورودیهای 1A یا 2A به عنوان Set Point برای کنترلر PID استفاده شود |
C |
|
ورودی برای دمای موتور و PTC |
E |
|
بدون استفاده |
F |
خروجیهای آنالوگ در درایو Yaskawa V1000
عملکرد خروجی آنالوگ AM توسط پارامترهای گروه 4H تنظیم میگردد.
|
پارامتر |
توضیح پارامتر |
|
4-01H |
متغیری که قرار است توسط این خروجی نشان داده شود را تعیین کنید. |
|
4-02H |
ضریب مربوط به خروجی آنالوگ AM. |
|
4-03H |
سطح صفر را برای متغیر خروجی تعیین میکند. |
نکته: متغیرهای درایو در گروه 1U قرار دارند. به عنوان مثال، اگر میخواهید فرکانس خروجی درایو را توسط خروجی آنالوگ AM نمایش دهید، باید مقدار 102 را در پارامتر 4-01H وارد کنید، زیرا فرکانس خروجی درایو در پارامتر 1-02U قرار دارد.
قطار پالس ورودی و خروجی در درایو Yaskawa V1000
ترمینال RP مربوط به قطار پالس ورودی و ترمینال MP مربوط به قطار پالس خروجی است. از پارامترهای گروه 6H برای تنظیم این دو ورودی و خروجی استفاده میشود.
|
پارامتر |
توضیح پارامتر |
|
H6-01 |
0= از ورودی قطار پالس برای کنترل سرعت درایو استفاده شود 1= از ورودی قطار پالس RP به عنوان فیدبک PID استفاده شود 2= از ورودی قطار پالس RP به عنوان Set Point PID استفاده شود. 3= از ورودی قطار پالس به عنوان یک انکودر ساده استفاده شود |
|
6-02H |
مقیاسبندی ورودی RP قطار پالس. |
|
6-03H |
بهره برای ورودی قطار پالس RP. |
|
6-04H |
بایاس برای ورودی قطار پالس RP. |
|
6-05H |
مدت زمان فیلتر برای ورودی قطار پالس RP. |
|
6-06H |
تعریف عملکرد خروجی قطار پالس MP. |
|
6-07H |
مقیاسبندی برای خروجی قطار پالس MP. |
پارامترهای حفاظتی در درایو Yaskawa V1000
پارامترهای گروه L برای حفاظت موتور و درایو به کار میروند. ایمنی در سیستمهای درایو از اهمیت بالایی برخوردار است. برای تهیه تجهیزات حفاظت الکتریکی، میتوانید به بخش محصولات در الکترومارکت مراجعه کنید.
|
پارامتر |
توضیح پارامتر |
|
1-01L |
تعیین نوع موتور و نوع خنک شدن موتور برای خطای اضافه بار حرارتی. |
|
1-02L |
مدت زمان عملکرد خطای اضافه بار. |
|
1-03L |
تعیین عملکرد درایو پس از اعلام هشدار اضافه حرارت. |
|
1-04L |
تعیین عملکرد درایو پس از اعلام خطای اضافه حرارت. |
|
1-05L |
مدت زمان فیلتر برای ورودی آنالوگ PTC. |
|
1-13L |
فعال یا غیرفعال کردن حفاظت اضافه بار حرارتی در زمان قطع لحظهای برق. |
|
2-01L |
عملکرد درایو در زمان قطع لحظهای برق ورودی. |
|
2-02L |
مدت زمان مجاز برای قطع لحظهای برق ورودی. |
|
2-04L |
مدت زمان لازم برای بازیابی ولتاژ پس از قطع لحظهای برق ورودی. |
|
2-05L |
حداقل مقدار ولتاژ باس DC برای اعلام خطای کاهش ولتاژ. |
|
L3-01 |
فعال یا غیرفعال کردن عملکرد جلوگیری از توقف موتور زیر بار زیاد در زمان شتاب مثبت. |
|
3-02L |
% جریان مجاز برای عملکرد Prevention Stall در زمان شتاب مثبت. |
|
3-03L |
% حداقل جریان در زمان شتاب مثبت برای جلوگیری از توقف موتور. |
|
3-04L |
فعال یا غیرفعال کردن Prevention Stall در زمان شتاب منفی. |
|
3-05L |
فعال یا غیرفعال کردن Prevention Stall در زمان کار عادی. |
|
3-06L |
% جریان مجاز برای Prevention Stall در حالت کار عادی. |
|
3-11L |
فعال یا غیرفعال کردن جلوگیری از ایجاد خطای اضافه ولتاژ. |
|
3-17L |
مقدار ولتاژ باس DC دلخواه برای حالت جلوگیری از خطای اضافه ولتاژ. |
|
5-01L |
تعداد دفعات ریاستارت اتوماتیک فالت. |
|
5-02L |
عملکرد رله خروجی فالت در زمان ریاستارت اتوماتیک. |
|
5-04L |
مدت زمان بین وقوع خطا تا ریست شدن اتوماتیک فالت. |
|
5-05L |
انتخاب نوع عملکرد ریست اتوماتیک فالت. |
|
7-01L |
محدود کردن مقدار گشتاور در جهت راستگرد. |
|
7-02L |
محدود کردن مقدار گشتاور در جهت چپگرد. |
|
7-03L |
محدود کردن گشتاور در حالت ژنراتوری راستگرد. |
|
7-04L |
محدود کردن گشتاور در حالت ژنراتوری چپگرد. |
|
7-06L |
ثابت زمانی انتگرالی برای محدود کردن گشتاور. |
|
7-07L |
روش محدود کردن گشتاور در زمان شتاب مثبت و منفی. |
|
8-01L |
حفاظت مقاومت ترمز داخلی درایو. |
|
8-02L |
مقدار اضافه حرارت درایو برای اعلام هشدار. |
|
8-03L |
عملکرد درایو در زمان اعلام هشدار اضافه حرارت درایو. |
|
8-05L |
حفاظت در برابر قطع فاز ورودی درایو. |
|
8-07L |
حفاظت در برابر قطع فاز خروجی درایو. |
|
8-09L |
فعال کردن خطای ارت فالت. |
|
8-10L |
تعیین نحوه عملکرد فن خنک کننده درایو. |
|
8-11L |
مدت زمان وقفه در قطع فن خنک کننده درایو. |
|
8-12L |
تعیین دمای هوای محیط بهکارگیری درایو. |
|
8-15L |
تعیین عملکرد خطای اضافه بار در سرعت کم. |
|
8-29L |
فعال کردن خطای بالانس نبودن جریان خروجی. |
|
8-35L |
تعیین نوع نصب درایو در تابلو. |
|
8-38L |
فعال کردن کاهش فرکانس کریر در سرعت کم. |
|
8-40L |
مدت زمان کاهش فرکانس کریر پس از رسیدن به سرعت عادی. |
|
8-41L |
اعلام هشدار در مورد اینکه جریان خروجی درایو از %150 فراتر رفته است. |
Hunting Prevention
هنگامی که بار روی موتور کم است، ممکن است موتور دچار لرزش شود. برای کاهش این لرزش، از عملکرد Hunting Prevention استفاده میشود. پارامترهای گروه 1n برای این منظور به کار گرفته میشوند.
|
پارامتر |
توضیح پارامتر |
|
1-01n |
فعال یا غیرفعال کردن Hunting Prevention. |
|
1-02n |
ضریب برای عملکرد Hunting Prevention. |
|
1-03n |
ثابت زمانی. |
|
1-05n |
ضریب برای حرکت در جهت معکوس. |
پارامترهای صفحه کلید و نمایشگر در درایو Yaskawa V1000
گروههای 1O، 2O، و 4O مربوط به صفحه نمایشگر و صفحه کلید روی درایو هستند.
|
پارامتر |
توضیح پارامتر |
|
O1-02 |
تعیین پارامتر نمایشی در زمان روشن شدن درایو. |
|
1-03O |
واحد اندازهگیری برای مقادیر نمایش داده شده. |
|
1-11O |
موقعیت نقطه ممیز در صفحه نمایش. |
|
2-01O |
فعال یا غیرفعال کردن کلید Reset/Local روی صفحه کلید. |
|
2-02O |
فعال یا غیرفعال کردن کلید Stop روی صفحه کلید. |
|
O2-05 |
تعیین عملکرد کلید Enter هنگام تنظیم فرکانس از طریق کیپد. |
|
2-06O |
عملکرد درایو در مورد حذف صفحه کلید از روی درایو. |
|
O2-07 |
جهت چرخش موتور هنگام کنترل از طریق صفحه کلید. |
|
2-09O |
تعیین منطقه بهکارگیری درایو (برخی پارامترها تغییر میکنند). |
اتوتیون موتور در درایو Yaskawa V1000
اتوتیون (Autotune) قابلیتی است که به درایو امکان میدهد پارامترهای خاص موتور را (که روی پلاک موتور موجود نیستند) مانند مقاومت اهمی سیمپیچها، اندوکتانس نشتی، اندوکتانس اصلی و نقاط اشباع در هسته آهنی را محاسبه کند. پارامترهای گروه 1T مربوط به این فرآیند هستند.
|
پارامتر |
توضیح پارامتر |
|
1-00T |
انتخاب موتور شماره یک یا دو برای اتوتیون. |
|
1-01T |
انتخاب نوع اتوتیون – گردان یا ساکن. |
|
1-02T |
توان نامی موتور (KW). |
|
1-03T |
ولتاژ نامی موتور (V). |
|
1-04T |
جریان نامی موتور (A). |
|
1-05T |
فرکانس نامی موتور (Hz). |
|
1-06T |
تعداد قطبهای موتور. |
|
1-07T |
سرعت نامی موتور (RPM). |
|
1-11T |
مقدار تلفات آهنی موتور. |
پارامترهای Monitor در درایو Yaskawa V1000
پارامترهای گروه U برای نمایش وضعیتهای مختلف درایو استفاده میشوند:
-
گروه 1U: نمایش مقادیر متغیرهای داخلی درایو (ولتاژ، جریان، فرکانس، توان و…).
-
گروه 2U: نمایش وضعیت داخلی درایو در زمان آخرین فالت.
-
گروه 3U: نگهداری تاریخچه فالتهای رخ داده.
-
گروه 4U: نمایش کارکرد درایو و سختافزار آن (مفید برای تعمیر و نگهداری).
-
گروه 5U: مشاهده مقادیر متغیرهای PID.
-
گروه 6U: نمایش مقادیر متغیرهای کنترلر.
گروه 1U
|
پارامتر |
توضیح پارامتر |
|
1-01U |
نمایش فرکانس مرجع. |
|
1-02U |
نمایش فرکانس خروجی درایو. |
|
1-03U |
نمایش جریان خروجی درایو. |
|
1-04U |
نمایش روش کنترلی انتخاب شده برای درایو. |
|
1-05U |
نمایش سرعت موتور. |
|
1-06U |
نمایش ولتاژ خروجی. |
|
1-07U |
نمایش ولتاژ باس DC. |
|
1-08U |
نمایش توان خروجی درایو. |
|
1-09U |
نمایش مقدار گشتاور مرجع. |
|
1-10U |
نمایش وضعیت ترمینالهای ورودی. |
|
1-11U |
نمایش وضعیت رله و ترانزیستورهای خروجی. |
|
1-12U |
نمایش وضعیت داخلی درایو. |
|
1-13U |
نمایش ولتاژ ورودی آنالوگ 1A. |
|
1-14U |
نمایش جریان یا ولتاژ آنالوگ ورودی 2A. |
|
1-16U |
نمایش فرکانس خروجی پس از استارت نرم. |
|
1-18U |
نمایش کد خطای OPE. |
|
1-19U |
نمایش کد خطای ارتباط سریال Modbus. |
|
1-24U |
نمایش تعداد پالسها ورودی قطار پالس RP. |
گروه 2U (آخرین فالت)
|
پارامتر |
توضیح پارامتر |
|
2-01U |
فالت درایو در حال حاضر. |
|
2-02U |
فالت قبلی درایو. |
|
2-03U |
فرکانس مرجع در زمان فالت قبلی. |
|
2-04U |
فرکانس خروجی درایو در زمان فالت قبلی. |
|
2-05U |
جریان خروجی درایو در زمان فالت قبلی. |
|
2-06U |
سرعت موتور در زمان فالت قبلی. |
|
2-07U |
ولتاژ خروجی درایو در زمان فالت قبلی. |
|
2-08U |
ولتاژ باس DC در زمان فالت قبلی. |
|
2-09U |
توان خروجی درایو در زمان فالت قبلی. |
|
2-11U |
وضعیت ترمینالهای دیجیتال ورودی در زمان فالت قبلی. |
|
2-12U |
وضعیت ترمینالهای دیجیتال خروجی در زمان فالت قبلی. |
|
2-14U |
مدت کارکرد درایو در زمان وقوع فالت قبلی. |
گروه 3U (تاریخچه فالت)
|
پارامتر |
توضیح پارامتر |
|
3-01U |
کد تازهترین فالت – آخرین فالت. |
|
3-02U |
کد یکی به آخرین فالت. |
|
3-03U تا 3-10U |
کد آخرین هشت فالت پس از 3-02U. |
|
3-11U |
کارکرد درایو در زمان آخرین فالت. |
|
3-12U |
کارکرد درایو در زمان یکی به آخرین فالت. |
|
3-13U تا 3-20U |
کارکرد درایو برای آخرین هشت فالت پس از 3-02U. |
گروه 4U (کارکرد درایو)
|
پارامتر |
توضیح پارامتر |
|
4-01U |
کل مدت کارکرد درایو. |
|
4-02U |
تعداد دفعات کارکرد درایو. |
|
4-03U |
مدت کارکرد فن خنک کننده درایو. |
|
4-05U |
% عمر خازن. |
|
U4-07 |
% عمر IGBT. |
گروه 5U (مقادیر PID)
|
پارامتر |
توضیح پارامتر |
|
5-01U |
نمایش مقدار فیدبک PID. |
|
5-02U |
نمایش مقدار ورودی PID. |
|
5-03U |
نمایش مقدار خروجی PID. |
|
5-04U |
نمایش مقدار Set Point برای PID. |
جدول کامل انتخاب مقاومت ترمز برای V1000 (بر اساس دیتاشیت Yaskawa)
جدول زیر بر اساس مشخصات رسمی Yaskawa برای duty cycle 10% (100-second interval) است. برای 3% duty cycle، مقاومتهای کوچکتری موجود است. گشتاور ترمز تقریبی ذکر شده.
| مدل درایو (CIMR-V) | HP (200V/400V) | مقاومت اهمی (Ω) | توان نامی (W) | گشتاور ترمز تقریبی (%) | پارت نامبر Yaskawa |
|---|---|---|---|---|---|
| VU2A0001BAA | 0.125 HP | 100 | 20 | 20 | ERF-100 |
| VU2A0002BAA | 0.25 HP | 100 | 20 | 20 | ERF-100 |
| VU2A0004BAA | 0.5 HP | 100 | 20 | 20 | ERF-100 |
| VU2A0005BAA | 0.75 HP | 100 | 20 | 20 | ERF-100 |
| VU2A0007BAA | 1 HP | 100 | 20 | 20 | ERF-100 |
| VU2A0009BAA | 1.5 HP | 100 | 40 | 20 | ERF-200 |
| VU2A0011BAA | 2 HP | 100 | 40 | 20 | ERF-200 |
| VU2A0013BAA | 3 HP | 100 | 40 | 20 | ERF-200 |
| VU2A0015BAA | 5 HP | 100 | 80 | 20 | ERF-400 |
| VU2A0018BAA | 7.5 HP | 100 | 80 | 20 | ERF-400 |
| VU2A0022BAA | 10 HP | 100 | 100 | 20 | ERF-500 |
| VU2A0024BAA | 15 HP | 100 | 100 | 20 | ERF-500 |
| VU4A0001BAA | 0.5 HP (400V) | 200 | 20 | 15 | ERF-100 |
| VU4A0002BAA | 1 HP | 200 | 20 | 15 | ERF-100 |
| VU4A0004BAA | 2 HP | 200 | 40 | 15 | ERF-200 |
| VU4A0005BAA | 3 HP | 200 | 40 | 15 | ERF-200 |
| VU4A0008BAA | 5 HP | 200 | 80 | 15 | ERF-400 |
| VU4A0010BAA | 7.5 HP | 200 | 80 | 15 | ERF-400 |
| VU4A0012BAA | 10 HP | 200 | 100 | 15 | ERF-500 |
| VU4A0014BAA | 15 HP | 200 | 100 | 15 | ERF-500 |
| VU4A0018BAA | 20 HP | 200 | 200 | 15 | ERF-1000 |
| VU4A0022BAA | 25 HP | 200 | 200 | 15 | ERF-1000 |
نکته: برای مدلهای خاص یا duty cycle متفاوت، با الکترومارکت تماس بگیرید. این جدول برای نصب پنل جداگانه (vented NEMA 1) طراحی شده.
الکترومارکت مقاومتهای سازگار را با قیمت مناسب تامین میکند.
نکته مهم: انتخاب مقاومت ترمز مناسب برای درایو شما حیاتی است. الکترومارکت مجموعهای از مقاومتهای ترمز با توانها و مقاومتهای مختلف را برای تضمین عملکرد ایمن و بهینه ارائه میدهد. برای مشاوره و انتخاب مقاومت ترمز مناسب، میتوانید با کارشناسان ما در الکترومارکت تماس بگیرید یا به صفحه انتخاب مقاومت ترمز در وبلاگ الکترومارکت مراجعه کنید.
جدول کامل لیست خطاهای (Faults, Alarms و Errors) درایو Yaskawa V1000
درایو V1000 خطاها را به سه دسته تقسیم میکند: Faults (خطاهای عمده که خروجی را قطع میکنند و موتور coast to stop میشود)، Alarms (هشدارهای جزئی که عملیات ادامه مییابد اما نیاز به بررسی دارد) و Errors (خطاهای تنظیماتی که نیاز به ریست دارند). خطاها روی LED operator نمایش داده میشوند و ALM LED روشن میماند.
اصول عیبیابی:
- Fault Reset: با خاموش/روشن کردن درایو یا فشار دکمه RESET ریست کنید. اگر تکرار شد، علت را بررسی کنید.
- نکته: برای PM motors، پارامتر A1-02=5 را چک کنید. از MEMOBUS/Modbus برای کدهای دقیق استفاده کنید.
جدول کامل خطاها (Faults و Alarms اصلی)
| کد خطا | نوع | توضیح (Display Text) | علت احتمالی | راهحل پیشنهادی |
|---|---|---|---|---|
| OC | Fault | Overcurrent | اتصال کوتاه خروجی، overload موقت، acceleration خیلی سریع | موتور را جدا کنید و بدون بار تست کنید. زمان C1-01 را افزایش دهید. |
| OV | Fault | Overvoltage | کاهش سرعت سریع، regenerative energy زیاد | مقاومت ترمز اضافه کنید. زمان deceleration را افزایش دهید (C1-02). |
| UV | Fault | Undervoltage | ولتاژ ورودی کم، اتصال ضعیف | ولتاژ منبع را چک کنید. سیمکشی را بررسی کنید. |
| PF | Fault | Power Fault | مشکل منبع تغذیه، surge voltage | فیلتر AC اضافه کنید. منبع را چک کنید. |
| GF | Fault | Ground Fault | اتصال به زمین در خروجی | کابل موتور را چک کنید. عایق را تست کنید. |
| LF | Fault | Output Phase Loss | از دست رفتن فاز خروجی | اتصالات U/T1, V/T2, W/T3 را بررسی کنید. |
| OH1 | Fault | Heatsink Overheat | دمای سینک حرارتی بالا | فن را تمیز کنید. تهویه را بهبود ببخشید. |
| OH2 | Fault | Motor Overheat | دمای موتور بالا (PTC) | سنسور PTC را چک کنید. بار را کاهش دهید. |
| OH3 | Fault | OH Pre-Alarm | هشدار قبل از overheat | دما را نظارت کنید (U2-09). |
| OS | Fault | Overspeed | سرعت موتور بیش از حد (PM motors) | پارامتر n8-45 را تنظیم کنید. |
| SC | Fault | Soft Charge Fault | مشکل مدار soft charge | خازنها را چک کنید. با Yaskawa تماس بگیرید. |
| rF | Fault | Braking Resistor Fault | overheat مقاومت ترمز | مقاومت را تعویض کنید. duty cycle را چک کنید. |
| EF0 | Fault | External Fault | ورودی EF از ترمینال | سیگنال خارجی را قطع کنید. |
| EF1-EF7 | Fault | External Multi-Function | faults خارجی از H1-01 تا H1-07 | اتصالات را بررسی کنید. |
| bb | Fault | Baseblock | بلوک پایه (در حین switch) | نرمال است، منتظر بمانید. |
| dnE | Fault | Drive Disabled | درایو غیرفعال | پارامتر b1-01 را چک کنید. |
| PUF | Fault | Power Unit Fault | مشکل واحد قدرت | درایو را تعویض کنید. |
| CCF | Fault | Control Circuit Fault | مشکل مدار کنترل | با الکترومارکت تماس بگیرید. |
| CPn | Fault | Control Power Fault | تغذیه کنترل قطع | منبع را چک کنید. |
| FBl | Fault | FB (Feedback) Error | خطای فیدبک (encoder) | اتصال encoder را بررسی کنید. |
| FNo | Fault | Frequency Reference Missing | مرجع فرکانس از دست رفته | منبع مرجع را چک کنید (b1-01). |
| FbE | Fault | Feedback Error | خطای فیدبک سرعت | پارامتر n5-01 را تنظیم کنید. |
| HBB | Fault | Holding Brake Fault | مشکل ترمز نگهدارنده | زمانبندی ترمز را چک کنید (b1-10). |
| CoF | Fault | Option Communication Fault | خطای ارتباط گزینه | کابل ModBus را چک کنید. |
| CE | Fault | MEMOBUS/Modbus Comm Error | خطای ارتباط | baud rate (n3-21) را چک کنید. |
| CrE | Fault | CRC Error | خطای CRC در ارتباط | دادهها را دوباره بفرستید. |
| PEr | Fault | MEMOBUS/Modbus Parity Error | خطای parity | تنظیمات parity (n3-23) را چک کنید. |
| oFA | Fault | Option Frequency Ref Error | خطای مرجع فرکانس گزینه | گزینه را ریست کنید. |
| oPr | Fault | Operator Connection Fault | مشکل اتصال operator | کابل operator را چک کنید. |
| Uv1 | Alarm | Undervoltage (Main Circuit) | هشدار undervoltage | ولتاژ را نظارت کنید. |
| Uv2 | Alarm | Control Power Supply Fault | هشدار تغذیه کنترل | منبع را چک کنید. |
| Uv3 | Alarm | Soft Charge Circuit Fault | هشدار soft charge | خازنها را تست کنید. |
| ov2 | Alarm | Overvoltage (Soft Charge) | هشدار overvoltage | regenerative را کاهش دهید. |
| ov3 | Alarm | Overvoltage (Main Circuit) | هشدار overvoltage | مقاومت ترمز اضافه کنید. |
| MnF | Alarm | Maintenance Time Reached | زمان نگهداری رسیده | فن/خازن را چک کنید (U2-15). |
| PASS | Alarm | Auto-Tuning Pass | اتوتیونینگ موفق | – |
| FAIL | Error | Auto-Tuning Fail | اتوتیونینگ ناموفق | پارامترها را چک کنید و تکرار کنید. |
| OPE01 | Error | Parameter Setting Error | خطای تنظیم پارامتر | E1-03 (V/f) را چک کنید. |
| OPE02 | Error | Carrier Frequency Setting Error | خطای فرکانس حامل | C6-02 را در محدوده مجاز بگذارید. |
| OPE03 | Error | Control Mode Selection Error | خطای انتخاب mode | A1-02 را چک کنید (V/f یا OLV). |
| OPE08 | Error | Operator Power Supply Fault | خطای تغذیه operator | operator را تعویض کنید. |
| OPE10 | Error | V/F Pattern Setting Error | خطای الگوی V/f | E1-04 تا E1-11 را بررسی کنید. |
| OPE11 | Error | Sequence Input Setting Error | خطای ورودی sequence | H1-01 را چک کنید. |
| oPE16 | Error | Hardware Error | خطای سختافزاری | با الکترومارکت تماس بگیرید. |
برای تعمیرات تخصصی اینورتر و درایوهای صنعتی AC و DC با برندهای معتبر مانند ABB، Delta، LS، Santerno و غیره، به خدمات حرفهای الکترومارکت اعتماد کنید! اطلاعات بیشتر در: تعمیرات اینورتر و درایوهای صنعتی
الکترومارکت به عنوان یک منبع معتبر و تخصصی در حوزه تأمین تجهیزات اتوماسیون صنعتی، آماده ارائه خدمات جامع به شما عزیزان است. ما به شما کمک میکنیم تا بهترین درایو Yaskawa V10004 را برای نیازهای خاص پروژه خود انتخاب کنید. خدمات ما شامل:
- مشاوره تخصصی رایگان: تیم مجرب مهندسان الکترومارکت آماده ارائه مشاورههای فنی دقیق برای انتخاب دقیقترین و مناسبترین درایو بر اساس مشخصات آسانسور شما هستند.
- تأمین و فروش: الکترومارکت تضمین میکند که شما درایو Yaskawa V1000 اصلی و با کیفیت را با بهترین قیمت و در کوتاهترین زمان ممکن دریافت خواهید کرد.
- پشتیبانی فنی و خدمات پس از فروش: حتی پس از خرید، میتوانید روی پشتیبانی فنی و خدمات پس از فروش ما برای نصب، راهاندازی، عیبیابی و رفع مشکلات احتمالی حساب کنید.
- منابع آموزشی و مقالات تخصصی: برای گسترش دانش خود در زمینه درایوها، PLC ها، HMI ها و دیگر تجهیزات صنعتی، میتوانید به طور منظم به وبلاگ الکترومارکت سر بزنید و از مقالات آموزشی ما بهرهمند شوید.
 تماس با ما – الکترومارکت
تماس با ما – الکترومارکت الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست.
الکترومارکت با سالها تجربه در زمینه مشاوره، فروش و تعمیر انواع اینورتر، آماده خدمترسانی به شماست. دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷
دفتر مرکزی: شهریار خیابان شهید رزاق دوست پلاک ۱۷  تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴
تلفن تماس: ۰۹۱۲۲۶۵۹۱۵۴ وبسایت:
وبسایت:  در دسترس برای مشاوره رایگان
در دسترس برای مشاوره رایگان