.
کنترل کننده های دور موتور یا اینورتر
Engine speed controllers or inverters how to act
کنترل کننده های دور موتور چیست؟
درایو یا اینورتر فرکانس متغییر و یا کنترل کننده دور موتور برای تنظیم دور الکتروموتورهای Ac استفاده میگردد.
اینورتر ها وظیفه “ کنترل دور موتور ” را بر عهده دارند.
کنترل کننده های دور موتور قادرند:
دور موتور را از صفر تا دور نامی موتور و حتی درصدی بالاتر بطور پیوسته تغییر دهند.
VFD
کاربرد اینورتر
تنظیم دقیق دور در الکتروموتورها علاوه بر منعطف نمودن پروسه های صنعتی ، در کاربردهای زیادی منجر به صرفه جوئی انرژی هم میگردد.
علاوه بر آن اینورتر ها جریان راه اندازی از شبکه را صفر میکند.
اینورتر ها میتوانند موتور را بطور نرم و کاملا کنترل شده استارت و استپ نمایند (soft start & soft stop).
زمان استارت و استپ را میتوان بدقت تنظیم نمود (acceleration & deceleration).
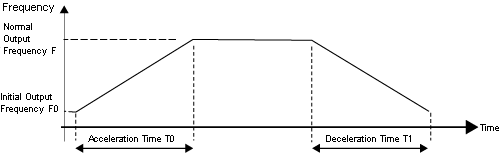
این زمانها میتوانند کسری از ثانیه و یا صدها دقیقه باشد.
توانائی کنترل کننده های دور موتور
کاربرد های اینورتر موتور چیست
در استارت و استپ نرم موجب کاهش قابل ملاحظه تنشهای مکانیکی در کوپلینگ ها و سایر ادوات دوار میگردد.
اولین وسیله تبدیل انرژی الکتریکی به انرژی مکانیکی موتورهای DC بودند.
موتورهای DC با وجود مزایایی چون کنترل آسان،سریع و دقیق گشتاور
و همچنین پاسخ بسیار سریع دینامیکی برای تغییرات سرعت بودند
ولی با پیدایش الگوریتم های جدید روی اینورتر های AC دیگر مورد استقبال قرار نمیگیرند.
موتورهای DC معایب زیر رادارند:
-
نیاز به تعمیر و نگهداری مکرر
-
قیمت بالا
-
نیاز به انکودر یاتاکومتر برای فیدبک سرعت
امروزه با توجه به پیشرفت تکنولوژی موتورهای الکتریکی AC و مزایایی از قبیل :
- اندازه کوچکتر
- قدرت بیشتر در مقایسه با موتورهای DC هم اندازه
- طراحی ساده و قیمت ارزان
- سبک و مقاوم در برابر ضربه
توصیه میشود در ادامه مطالعه شود: اینورتر DC تمام دیجیتال سانترنو + معرفی ویژه و کاربردی پارامترهای اصلی
همزمان با پیشرفت و فزونی کاربرد موتورهای AC
تکنولوژی کنترل کننده های دور موتور AC نیز دستخوش تغییرات شگرفی شده اند.
بطوریکه اینورتر های AC قابلیت موتورهای AC را تکمیل کرده اند.
در کاربردهای صنعتی غالباً می خواهیم که موتورها در سرعت و گشتاور دلخواهمان کارکنند ،
بنابراین برای کنترل سرعت و گشتاور موتور از کنترل کننده های دور موتور استفاده می کنیم .
اینورتر ها تجهیزاتی هستند از قطعات الکترونیکی مانند:
تریستورها ، IGBT و خازن ساخته شدند که از آنها برای کنترل ولتاژ و کنترل فرکانس استفاده می شود.
علاوه براین در کاردبرهایی مانند جرثقیل ها ،
آسانسورها و کاربرد های صنعتی که عدم وجود ضربه در راه اندازی و توقف موتور از اهمیت ویژه ای برخوردار است،
استفاده از اینورتر اجتناب ناپذیر می شود.
مقایسه عملکرد سافت استارتر با کنترل کننده های دور موتور
راه انداز نرم یا سافت استارتر:
- راه انداز نرم یا سافت استارتر در صنعت برای راه اندازی الکتروموتور بکار میرود و دراین حالت بیشترین جریان راه اندازی حدود ۲٫۵ برابر جریان حالت عادی موتور است منحنی راه اندازی با یک شیب مناسب و قابل انتخاب است.
- در سافت استارتر ها ازکلید های استاتیکی (SSR) استفاده میشود که درتوان های پایین از ترایاک و در توان های بالا از یک جفت تریستور بصورت معکوس و موازی استفاده میشود.
- در راه انداز نرم تغییر ولتاژ وجود دارد و در واقع با کنترل ولتاژ سینوسی ورودی در هردو نیم سیکل مثبت و منفی ولتاژ خروجی با همان فرکانس ورودی میشود.
- از یک راه انداز نرم میشود تعداد زیادی موتور را با ایجاد یک مدار فرمان مناسب راه اندازی کرد به طور مثال تعداد ۱۰ دستگاه موتور یا بیشتر را میشود با یک راه انداز نرم استارت کرد.
- در راه انداز نرم امکان افزایش دور موتور بیشتر از دور نامی وجود ندارد.
«کلیدهای استاتیکی یاهمان SSR درجریان های مختلف دربازار وجود دارد»
توصیه میشود در ادامه مقاله فوق مطالعه شود: 13 ویژگی و قابلیت در استفاده از سافت استارتر ها برای راه اندازی موتور
کنترل کننده های دور موتور یا اینورتر ها
Engine speed controllers or inverters
- راه اندازی الکتروموتور با کمترین جریان راه اندازی حدود جریان عادی موتور با یک منحنی تقریبا خطی قابل انتخاب.
- اینورتر بهترین راه انداز نرم موتور ولی با قیمتی بیش از دو برابر راه انداز نرم (سافت استارتر)
- از اینورتر یا کنترل دور در صنعت بطور عموم برای موتورهایی که کنترل سرعت لازم است استفاده میشود
- تغییرات دور موتور در اینورتر با تغییر فرکانس ایجاد میشود لذا امکان افرایش فرکانس خروجی تا چندین برابر فرکانس ورودی وجود دارد
- بطور معمول دراینورتر ها از ترانزیستور های IGBT در قدرت های بالا استفاده میشود و در قدرت های پایین از ترانزیستور های MOSFET هم قدرت استفاده میشود.
در مجموع سافت استارتر همانطور که از نامش پیداست تنها در هنگام راه اندازی یک الکتروموتور کاربرد دارد.
حذف صدمات مکانیکی الکتروموتور ها
الکتروموتورها به دلیل جریان کشی ۶ تا ۸ برابر جریان نامی در هنگام راه اندازی صدمات زیادی می بینند .
بطوریکه عمده استهلاک الکتروموتورها در هنگام راه اندازی می باشد.
بوسیله سافت استارتر یا کنترل کننده های دور موتور راه اندازی از طریق افزایش کنترل شده فرکانس یا ولتاژ انجام می گیرد و با این کار Energy Saving نیز صورت می گیرد.
کنترل کننده های دور موتور محدود به زمان راه اندازی نمی باشد .
و در هر لحظه می توان بوسیله سیگنالهای کنترلی که معمولا ۴~۲۰ mA می باشد سرعت الکتروموتور را کنترل نمود.
کنترل کننده های دور موتور قابلیت های بسیار زیادی دارند از قبیل :
راه اندازی نرم موتور، چپگرد و راستگرد کردن موتور و تغییر دور موتور،حفاظت کامل از الکتروموتور،کنترل گشتاور موتور،کنترل موقعیت یا پوزیشن موتور.
و البته قیمت بالاتری نیز دارد.
نصب اینورتر روی کمپرسور اسکرو به منظور کاهش استهلاک و کاهش مصرف انرژی
حال آنکه سافت استارتر فقط برای راه اندازی نرم موتور و حفاظت از موتور استفاده میشود.
در ادامه توصیه میشود مقاله فوق را مطالعه فرمایید: فرق اینورتر و سافت استارتر – بخش اول
روشهای متداول کنترل سرعت و گشتاور موتورهای DC
موتورهای DC دو محدوده کنترل سرعت دارند:
ناحیه اول : با ثابت نگه داشتن جریان تحریک و تغییر ولتاژ آرمیچر از صفر تا مقدار نامی ، سرعت از صفر تا مقدار نامی تغییر می کند در این محدوده گشتاور ثابت می ماند.
ناحیه دوم : با ثابت نگه داشتن ولتاژ آرمیچر و کاهش جریان تحریک می توان به سرعت هایی بیشتر از سرعت نامی دست یافت در این حالت با افزایش سرعت ، گشتاور کاهش می یابد ، این محل تضعیف میدان (field weakening) نامیده می شود.
در محدوده گشتاور ثابت ، با افزایش سرعت توان به صورت خطی افزایش می یابد، بعداز سرعت نامی ،
توان ثابت می ماند و گشتاور به صورت نمایی کاهش می یابد.
بنابراین در اینورتر های DC با کنترل متغیر های حقیقی جریان تحریک و ولتاژ آرمیچر ، سرعت و گشتاور را کنترل میکنند.
با بهره گیری از عملکرد اینورتر های DC ، تکنولوژی کنترل کننده های دور موتور AC توسعه پیدا کرد،
و روشهای کنترل اسکالر ، کنترل برداری و کنترل مستقیم گشتاور معرفی شدند.
روش کنترل اسکالر:
Scalar control method
این روش را درصنعت با عناوینی نظیر مدولاسیون عرض پالس (PWM) ، کنترل فرکانس V/F یا VVVF کنترل برداری که قبلاً کنترل میدانی یا (FOC) می شناسند .
نخست ولتاژ AC به ولتاژ DC تبدیل شده،
سپس بوسیله مدولاتور، دنباله پالسی از ولتاژ با فرکانس متغیر به موتور ارسال می شود.
در این روش مقدار V/F ثابت است بنابراین با افزایش فرکانس ،
ولتاژ افزایش می یابد و در نهایت همانطوری که مشاهده می شود ،
در این حالت کنترلی روی گشتاور موتور وجود ندارد.
و تغییرهای کنترلی ولتاژ و فرکانس هستند که بطور غیر مستقیم موتور را کنترل می کنند.
به علت عدم استفاده از فیدیک ، کنترلی روی موفقیت یا سرعت شافت موتور وجود ندارد.
همچنین استفاده از مدولاتور باعث ایجاد تاخیر در پاسخ به گشتاور به سرعت می شود.
برای درک کامل مبحث وکتور کنترل توصیه میشود مقاله فوق مطالعه شود: الگوریتم وکتور کنترل + نحوه عملکرد اینورتر
روش کنترل برداری شار:
Flux vector control method
برای نزدیک شدن به الگویی کنترلی نظیر درایوهای DC ،
متغیرهای کنترلی در موتورهای القایی باید حقیقی باشند در روش اسکالر ،
متغیرهای کنترلی غیر حقیقی هستند در صورتی که در این روش سعی بر آن شده تا متغیرهای حقیقی موتور (شار و گشتاور موتور) کنترل شود.
برای کنترل بردار شار و گشتاور موتور، جریان موتور باید قابل کنترل باشد اما در این موتورها کنترل سیستمی روی جریان موتور وجود ندارد.
از طرفی جریان موتور تابعی ازجریان استاتور است که بنابراین با استفاده از محاسبات ریاضی پیچیده با توجه به وجود این رابطه بین جریان موتور و جریان استاتور،
شار موتور قابل کنترل هستند در ضمن با استفاده از فیدیک،می توان موقعیت و سرعت موتور را کنترل کرد.
با وجود دقت در سرعت و پاسخ سریع به تغییرات گشتاور ، احتیاج به فیدبک و مدولاتور از معایب این درایوها است.
روش کنترل مستقیم گشتاور (DTC)
Direct torque control
کنترل مستقیم گشتاور یا DTC پیشرفته ترین تکنولوژی کنترل موتورهای AC است که توسط شرکت ABB ارائه شده است این تکنولوژی جایگزین روشهای متداول مانند روش اسکالر و کنترل برداری شار در حلقه باز و بسته شده است.
اساس کار DTC
اساس کار DTC بر پایه تئوری کنترل جهت میدان موتورهای القایی بنا شده است شار استاتور و گشتاور ،
تغییرهای کنترلی DTC هستند ، محاسبه وضعیت موتور ،
بوسیله یک سیگنال پروسسور دیجیتال (DSP) سرعت بالا انجام می شود
بطوریکه این محاسبات در مدل نرم افزاری موتور ۴۰۰۰۰ بار در ثاینه صورت می پذیرد.
با توجه سرعت بالای محاسبات و مقایسه مقادیر واقعی با مقادیر مرجع هر عمل سوئیچینگ جداگانه بررسی می شود و هنگام تغییرات دینامیک مانند بارهای ناگهانی عمل سوئیچینگ بهینه می شود.
چرا روش کنترل مستقیم گشتاور (DTC)
در این روش علاوه بر اینکه متغیرهای کنترلی ، حقیقی می باشند پردازش نرم افزاری بسیار سریع و عدم نیاز به انکودر و مدولاتور قابل توجه است.
ویژگی های درایو با پاسخ گشتاور سریع حدود ۱۰ برابر سریعتر از درایوها و موتور های DC و سایر درایوهای AC است.
دقت سرعت دینامیکی در این درایوها ۸ برابر بهتر از یک درایو AC می باشد.
نخست بلوک گشتاور را توضیح می دهیم :
مرحله اول اندازه گیری جریان ولتاژ موتور است در مرحله بعد این ولتاژ و جریان به بلوک Adaptive motor model داده میشود در این بلوک مدار معادلی برای موتور در نظر گرفته شده است این بلوک برای اینکه از روی مقادیر ولتاژ جریان و موقعیت سوئیچ های موتور بتواند مقادیر شار و گشتاور موتور را به دست آورد نیاز به پارامترهای ذاتی موتور
مانند : مقاومت استاتور ضریب اشباع و اندوکتانس القایی دارد که در ابتدای کار و توسط عمل Auto tuning اندازه گیری می شوند.
مقادیر گشتاور شار به دست آمده از بلوک Motor model هر ۲۵ میکرو ثانیه یکبار با مقادیر مرجع مقایسه می شوند و بهترین موقعیت سوئیچ های قدرت انتخاب می شوند با توجه به اینکه مانند روش مدلاتور الگوی از پیش تعیین شده ای وجود ندارد ،
نسبت به روش های کنترل برداری ۳۰% تغییر حالت های سوئیچ ها کمتر است و بنابراین تلفات کمتری روی IGBT خواهیم داشت و علاوه بر آن بدون انکودر به سرعت پاسخ گشتاوری معادل ۲ میل ثانیه خواهیم رسید.
در مرحله پنج خروجی بلوک سرعت ، از یک محدود کننده عبور می کند و ورودی این محدود کننده می توان از یک مرجع خارجی تغذیه شود.
در مرحله ششم کنترلر سرعت ( شامل PID و مقایسه کننده سرعت ) سرعت واقعی را با سرعت مرجع مقایسه می کند.
مزایای کنترل سیستم گشتاور (DTC) :
The benefits of torque control DTC
- پاسخ سریع به تغییرات گشتاور: در لحظات گذرای بار ، زمان افت سرعت کاهش می یابد و در نتیجه پروسه بهتر کنترل شده و محصولات باکیفیت بالاتر عرضه می شوند.
- کنترل گشتاور در فرکانس پایین: این مزیت بخصوص در کاربردهایی چون جرثقیل ها و آسانسورها که بار به راه اندازی و توقف منظم و نرم نیاز دارد، قابل توجه می باشد.
- گشتاور خطی : افزایش گشتاور بصورت خطی در کاربردهایی چون Winder
- دقت سرعت دینامیک: بعد از تغییر ناگهانی بار ، موتور می تواند با سرعت قابل ملاحظه ای به حالت پایدار برگردد.
ترمز الکتریکی
Electric Brake
هدف این تکنولوژی ارائه راه کارهای عملی برای کاهش انرژی تلف شده در عمل ترمز گیری و برگشت این انرژی به صورت الکتریکی به شبکه است.
ناحیه های چهار گانه سرعت و گشتاور
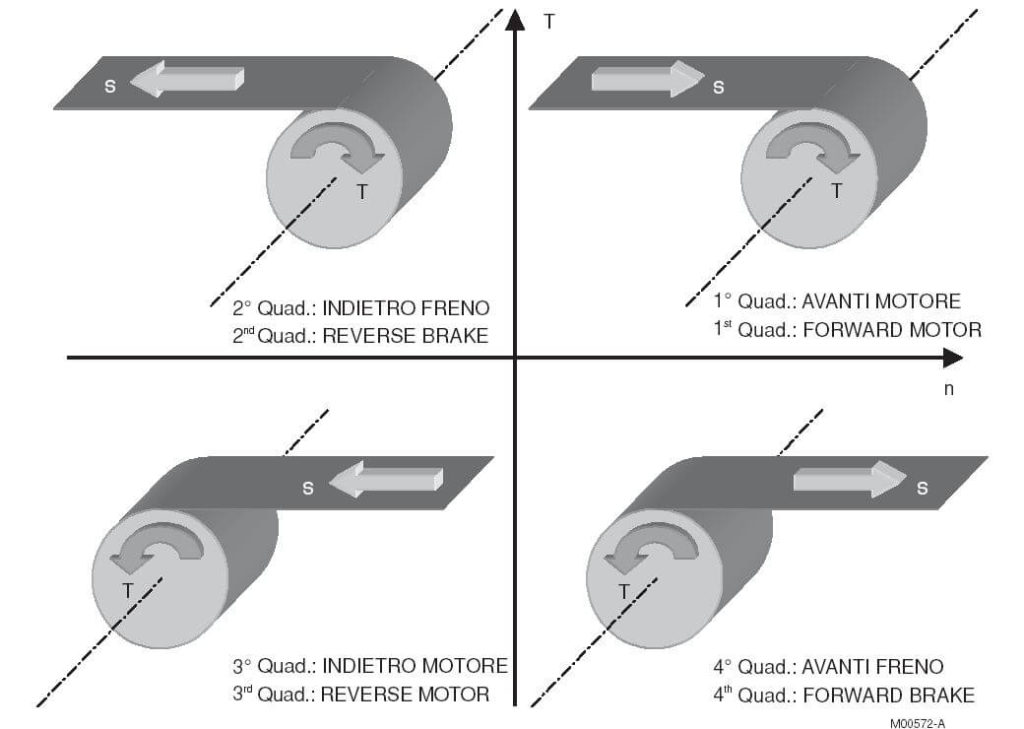
کاربرد درایو براساس سرعت و گشتاور به سه دسته اصلی تقسیم می شود:
- بهترین کاربرد مشترک درایوهای AC در ناحیه I و III است در این ناحیه سرعت و گشتاور هم جهت هستند و جهت توان از داریو به موتور است مانند فن ها و پمپ ها
- ناحیه II: در این حالت جهت توان از کنترل کننده های دور موتور به موتور ، یا برعکس است.
در صنایع زیادی برای توقف اضطراری ماشینها از این ناحیه کاربرد دارد. - ناحیه IV : آسانسورها و جرثقیل از این کاربردها هستند و بعضی از ماشینهای دیگر مانند برش ، خم ، پیچش و دستگاه تست موتور که نیاز به تکرار سرعت و تغییر گشتاور دارند در این ناحیه جهت توان از درایو به موتور و یا برعکس است .
راه کارهای ترمز الکتریکی کنترل کننده های دور موتور:
کنترل کننده های دور موتور AC پیشرفته شامل یکسو ساز خط برای تبدیل ولتاژ AC و DC هستند سپس اینورتر ولتاژ DC را به ولتاژ AC با فرکانس دلخواه ، برای تغذیه موتور تبدیل می کند
ترمز شار ( Motor flux Braking)
تکنولوژی ترمز شار بر پایه تلفات موتور بنا شده .
هنگام ترمزگیری ، شار موتور و در نتیجه جریان مغناطیسی کننده موتور افزایش می یابد با این روش موتور به سرعت از حالت ترمز به حالت موتوری باز می گردد افزایش جریان به معنای افزایش تلفات موتور می باشد و هرچه انرژی ترمز بیشتر باشد تلفات بیشتر است.
ترمز چاپر و ترمز مقاومتی :
کنترل کننده های دور موتور AC از یکسوساز ۱۸،۱۲،۶ پالس جهت انتقال توان از شبکه به bus- DC استفاده می کنند اگر در ناحیه II و IV جهت توان از موتور به کنترل کننده های دور موتور باشد خازن DC شارژ شده و ولتاژ bus- DC افزایش می یابد به منظور جلوگیری از افزایش ولتاژ bus- DC دو راه وجود دارد .
- کنترل افزایش ولتاژ : در این روش گشتاور ترمز گیری محدود می شود تاسطح ولتاژ ثابت بماند.
- ترمز چاپر : به این روش انرژی ترمز به مقاومت ترمز brake resistor در شکل شماتیک روش اسکالر داده شده و به صورت گرما هدر میرود.

ترمز الکتریکی
هنگامی که عمل ترمز گیری صورت می پذیرد موتور درحالت ژنراتوری عمل کرده و انرژی درجهت عکس به جریان می افتد در روش های فوق این انرژی به صورت گرما هدر می رود.
اما به کمک تکنولوژی ترمز الکتریکی ، انرژی معکوس نخست از AC به DC سپس از DC به AC تبدیل شده و به کمک فیلتر LCL به صورت فاز به خط انتقال برمی گردد.
سازگاری الکترو مغناطیسی
E.M.C Electromagnetic complicity
تمام تجهیزات الکتریکی بنا به کارکرد خود ، تشعشعات الکترومغناطیسی فرکانس بالا و فرکانس پائین تولید می کنند.
EMC بر این اساس بنا شده است که این تشعشعات از حد مجاز خود تجاوز نکند مطابق شکل زیر برای کنترل تشعشعات دو فاکتور مصونیت و میزان تشعشع ، بایستی در نظر گرفته شود.
EMC رنج تا GHZ 400 را شامل می شود و به بخش بالای GHZ 2 فرکانس بالا و زیر GHZ 2 فرکانس پایین تقسیم می شود.
منبع انتشار امواج فرکانس بالا ، مبدل های فرکانس شامل عناصر قدرت با سوئیچینگ سریع هستند مانندIGBT و منبع انتشار امواج فرکانس پایین ، هارمونیک های ولتاژ می باشد.
تشعشعات بالای۲ GHZ برای انسان مضرند و بازگشت هارمونیک ها به شبکه آسیب می رساند.
تجهیزات الکتریکی در مقابل فرکانس های پائین و بالای غیر معمول بایستی مصونیت داشته باشند و این فرکانس ها نباید در عملکرد آنها تاثیری داشته باشند.
توصیه میشود در ادامه مطالعه شود: اصلاح ضریب توان و فیلتر هارمونیکی
تشعشع : Emission
حد نشر فرکانس های بالا (ناشی از سوئیچینگ سریع تجهیزات قدرت) برای هر وسیله الکتریکی باید قابل قبول باشد تا بر روی عملکرد سایر تجهیزات الکتریکی تاثیری نداشته باشد.
راه کارهای EMC :
بطور معمول کنترل کننده های دور موتور از مصونیت خوبی برخوردارند، مگر اینکه امواج الکترومغناطیس شده از تجهیزات داخلی کنترل کننده های دور موتور بر روی عملکرد سایر قسمت های درایو تاثیر منفی بگذارند.
بنابراین آنچه در طراحی و کاربرد کنترل کننده های دور موتور بایستی مد نظر قرار گیرد، محدود کردن نشر امواج الکترو مغناطیس است .
جلو گیری از نشر (conductive Emission)
- استفاده از فیلترینگ RFI برای تداخل فرکانس بالا
- استفاده از جرقه گیر در رله ها و کنتاکتورها و شیرها برای کاهش جرقه ای ناشی از سوئیچینگ
- استفاده از حلقه های فریت در نقاط اتصال کابل های قدرت
توصیه میشود در ادامه مطالعه شود: اسپیک (نوسانات شدید)ولتاژ بالا (DV/ DT) و حفاظت موتور
جلو گیری از نشر ناشی از تشعشع Radia ted emission
- بکارگیری محفظه فلزی (تابلو برق) رنگ نشده و بدون خوردگی که تمام صفحات آن به زمین وصل شده و بطور کامل آب بندی شده باشد.
- استفاده از کابلهای و سیم های شیلددار و بکار بردن روشهای سیم کشی مناسب برای جلوگیری از تداخل.
- انتخاب و نصب تجهیزات فرعی ، روشهای صحیح سیم کشی داخلی ، توجه زیاد به مساله ارتینگ و بطور کلی دقت در راهنمای همراه با اینورتر برای نصب آن
کنترل کننده های دور موتور متناوب (AC Drive)
با استفاده از تکنولوژی الکترونیک قدرت یا ادوات کلیدزنی نیم رسانای قدرت، بهره وری و کیفیت فرایندهای صنعتی مدرن بهبود فزاینده ای یافته است.
تخمین زده می شود که با استفاده از الکترونیک قدرت، حدود ۱۵ تا ۲۰ درصد امکان صرفه جوئی انرژی الکتریکی وجود دارد.
هم چنین با پیشرفت سریع و کاهش مداوم قیمت ها در عرصه الکترونیک قدرت زمینه برای حضور گسترده آنها در کاربردهای صنعتی، حمل و نقل و حتی خانگی فراهم می گردد.
نیروی محرک بیشتر پمپ ها، فن ها و یا هر وسیله ای که نیاز به نیروی گرداننده خارجی دارد، معمولاً توسط موتورهای القائی تامین می شود که در دور ثابت کار میکنند.
برای همین در سالهای اخیر با پیشرفت های انجام گرفته در زمینه تکنولوژی الکترونیک قدرت ، استفاده از موتورهای القائی همراه با کنترل کننده دور موتور AC DRIVE یا کنترل کننده های دور موتور رو به گسترش است.
کنترل کننده های دور موتور ابزار هایی هستند که توان ورودی با ولتاژ و فرکانس ثابت را به توان خروجی با ولتاژ و فرکانس متغیر تبدیل میکنند.
باید توجه کرد که دور یک موتور تابعی از فرکانس منبع تغذیه آن است.
به همین جهت یک کنترل کننده های دور موتور نخست برق شبکه را به ولتاژ DC تبدیل کرده و سپس آنرا با استفاده از یک اینورتر مجددا به ولتاژ AC با فرکانس و ولتاژ متغیر تبدیل میکند.
در یک درایو ولتاژ پائین قسمت اینورتر متشکل از سوئیچهای قدرتی است که با سوئیچ زنی متناوب سیگنال خروجی با فرکانس مورد نظر را تولید می کنند.
این کلیدها در سالهای اخیر تغییرات تکنولوژیک زیادی پیدا کرده اند.
با ورود سوئیچهای قدرتی مانند IGBT که هم توانایی کار در قدرت های بالا و هم سرعت بالای سوئیچ زنی را توأماً به همراه دارد،
زمینه برای طراحی درایوهای با قیمت مناسب و کارایی بهتر فراهم شد.
مزایای استفاده از کنترل کننده های دور موتورهای الکتریکی:
- عمر مفید بالا (به دلیل استفاده از مدارات الکترونیک قدرت)
- توانائی درایو در بازگرداندن انرژی مصرفی در ترمزهای مکانیکی و یا مقاومت های الکتریکی به شبکه
- کاهش جریان راه انداز کشیده شده از شبکه (جریان راه اندازی کمتر از ۱۰ درصد جریان نامی می شود)
- کاهش مصرف انرژی در سیستم های دارای فن (در گذشته با وجود موتور های دور ثابت، کنترل جریان سیال با دمپرها صورت می گرفت)
- کاهش تنش های الکتریکی (به دلیل راه اندازی و توقف نرم) و در پی آن کاهش تنش های مکانیکی و این خود باعث کاهش هزینه های تعمیر و نگهداری می شود.
- افزایش دامنه تغییرات ممکن برای سرعت موتور نسبت به روش های مکانیکی
- اضافه شدن امکانات نرم افزاری برای مدیریت عملکرد کنترل دور
روش های کنترل سرعت در درایو های AC
کنترل کننده های دور موتور انواع مختلفی دارند و قیمت آنها علاوه بر اینکه برای چه توانی استفاده می شود،
وابسته به نوع تکنولوژی بکار رفته در ساختمان آنها می باشد.
تکنولوژی به کار رفته، روش های کنترل سرعت را در درایوها تعیین می کند.
ساده ترین روش کنترل موتورهای AC روش تثبیت نسبت ولتاژ به فرکانس (یا کنترل V/F ثابت) میباشد.
اینک این روش، بطور گسترده در کاربردهای صنعتی مورد استفاده قرار می گیرد.
این روش از نوع اسکالر بوده و بصورت حلقه باز با پایداری مطلوب عمل می کند.
مزیت این روش سادگی آن است.
در مقابل، این شیوه برای کاربردهای با پاسخ سریع مناسب نمی باشند.
روبوتها و ماشینهای ابزار نمونه هائی از کاربردهای با دینامیک بالا هستند.
در این کاربردها روشهای کنترلی برداری استفاده میشود.
در روشهای کنترلی برداری با تفکیک مولفه های جریان استاتور به دو مولفه گشتاور ساز و فلو ساز، و کنترل آنها با استفاده از رگولاتورهای PI ترتیبی داده میشود که موتور AC نظیر موتور DC کنترل شود.
و تمام مزایای موتور DC از جمله پاسخ گشتاور سریع در موتورهای AC نیز در دسترس خواهد بود.
علاوه بر دو روش فوق
روشهای دیگری مانند کنترل با استفاده از نمونه برداری از جریان تحریک که یک روش حلقه بسته است (FCC)
و هم چنین روش کنترل گشتاور و … وجود دارد که در درایوها به کارگرفته می شود.
کنترل کننده های دور موتور :
کنترل کننده های دور موتورهای الکتریکی هر چند که ادوات پیچیده ای هستند.
ولی چون در ساختمان آنها از مدارات الکترونیک قدرت استاتیک استفاده می شود
و فاقد قطعات متحرک می باشند، از عمر مفید بالائی برخوردار هستند .
مزیت دیگر کنترل کننده های دور موتور توانائی آنها در عودت دادن انرژی مصرفی در ترمزهای مکانیکی و یا مقاومت های الکتریکی به شبکه می باشد .
در چنین شرائطی با استفاده از کنترل کننده های دور مدرن می توان از اتلاف این نوع انرژی جلوگیری نمود .
بطوریکه در برخی کاربردها قیمت انرژی بازیافت شده از این طریق ، در کمتر از یکسال معادل هزینه سرمایه گذاری سیستم بازیافت انرژی می شود .
کنترل کننده های دور موتور انواع مختلفی دارند.
قیمت کنترلرها وابسته به نوع تکنولوژی بکار رفته در ساختمان آنها میباشد.
-
روش تثبیت نسبت ولتاژ به فرکانس (یا کنترل V/ F ثابت) :
ساده ترین روش کنترل موتورهای AC روش تثبیت نسبت ولتاژ به فرکانس میباشد.
اینک این روش، بطور گسترده در کاربردهای صنعتی مورد استفاده قرار میگیرد.
این نوع کنترلرها از نوع اسکالر بوده و بصورت حلقه باز با پایداری خوب عمل میکنند.
مزیت این روش سادگی سیستم های کنترلی آن است.
در مقابل این نوع کنترلرها برای کاربردهای با پاسخ سریع مناسب نمی باشند. -
روش کنترل برداری :
روبوتها و ماشینهای ابزار نمونه هائی از کاربردهای با دینامیک بالا هستند.
در این کاربردها روش های کنترلی برداری استفاده میشود.
در روش های کنترلی برداری با تفکیک مولفه های جریان استاتور به دو مولفه تورک ساز و فلو ساز، و کنترل آنها با استفاده از رگولاتورهای PI ترتیبی داده میشود که موتور AC نظیر موتور DC کنترل شود.
و تمام مزایای موتور DC از جمله پاسخ گشتاور سریع در موتورهای AC نیز در دسترس خواهد بود. -
روش کنترل مستقیم گشتاور (Direct Torque Control):
پاسخ گشتاور در روشهای برداری حدود ۱۰ – ۲۰msو
- در روشهای کنترل مستقیم گشتاور (Direct Torque Control ) این زمان حدود ۵ ms است
درایو های AC دور متغیر ، سیستمهای کنترل سرعت موتور های AC می باشند.
درایو های AC (کنترل کننده های دور موتور) هم سرعت موتور های القایی و هم سرعت موتور های سنکرون را با تنظیم فرکانس تغذیه ی موتور کنترل می کنند.
درایو های AC با عناوین:
درایو های تنظیم سرعت (ASD) ، یا درایو های تنظیم فرکانس (AFD) ، یا درایو های فرکانس متغیر (UFD)، یا درایو سرعت متغیر (VSD) و یا همه مبدل های فرکانس(FC) یا کنترل کننده های دور موتور نیز شناخته می شوند.
اولین موتور AC در سال ۱۸۹۹ طراحی شد.
موتور های AC با استفاده از القای الکترومغنا طیسی انرژی الکتریکی را به انرژی مکانیکی تبدیل می کنند موتورهای AC دارای:
- سرعت ثابت، که با فرکانس تغذیه معین می شوند.
- گشتاور ثابت
می باشند .
در ادامه توصیه میشود مطالعه شود: مقایسه بدنه ۷ نوع از رایج ترین الکتروموتور های استفاده شده در صنعت
همیشه سرعت ثابت در تمامی پروسه ها وکاربردها مناسب نیست.
و لازم است که بتوان سرعت را متناسب با نیاز تغییر داد.
کنترل پروسه و کاهش مصرف انرژی دو دلیل اولیه برای استفاده از کنترل کننده های دور موتور می باشد.
کنترل کننده های دور موتور در اصل برای کنترل پروسه ساخته شدند ،
اما کاهش مصرف انرژی نیز به همان میزان دارای اهمیت است.
ذخیره ی انرژی با استفاده از کنترل کننده های دور موتور :
مصرف انرژی اغلب در کنترل کننده های دور موتور کمتر از کاربردهای سرعت ثابت است.

پمپ ها و فن ها دارای بیشترین استفاده در صنعت و متقابلا بیشترین مصرف انرژی را در یک سیستم صنعتی در بر میگیرند.
در صورتیکه یک فن با سرعت ثابت کار کند،
ممکن است که جریان هوا گاهی اوقات بیشتر از مقدار مورد نیاز باشد.
جریان هوای اضافی را می توان با یک دمپر محدود نمود اما مفیدتر آن است
که بتوان جریان هوا را با تنظیم سرعت موتور تنظیم نمود.
تنظیم سرعت بعنوان وسیله ای جهت کنترل پروسه :
موارد زیر فواید کنترل پروسه با استفاده از کنترل کننده های دور موتور می باشند :
- عملکرد هموارتر (S moother)
- کنترل افزایش شتاب
- سرعتهای مختلف برای هر پروسه
- جبران سازی تغییرات در متغیرهای پروسه
- امکان عملکرد آرام (کند) به منظور Setup
- تنظیم سرعت تولید
- مکان یابی دقیق Positions control
- کنترل گشتاور و یا Tension
مثال:
کنترل کننده های دور موتور عملکرد یک نواخت تری در مقایسه با کارکرد های دمپر ثابت دارد.
برای مثال در یک ایستگاه انتقال فاضلاب ،فاضلاب از طریق لوله های ، تحت نیروی گرانشی ،
به یک چاه منتقل می شود و از این پخش به پروسه تصفیه پمپ می شود.
در صورت استفاده از پمپ های سرعت ثابت ، پمپ ها به گونه ای تنظیم می شوند.
در صورتیکه مایع داخل چاه به حد بالای مشخصی رسید استارت شده
و در صورتیکه سطح آن به حد پایین رسیده استپ شوند.
این روشن ، خاموش شدن های پیوسته پمپ ها موجب کشیده شدن جریان الکتریکی بالا هنگام استارت موتور و در نتیجه ایجاد تنشهای گرمایی و الکترو مغناطیسی در موتور و تجهیزات کنترل قدرت میگردد.
پمپ ها و لوله ها تحت فشارهای مکانیکی و هیدرولیکی قرار می گیرند.
پروسه تصفیه فاضلاب دارای مجموعه ای از تنشها در طول انتقال فاضلاب می باشد .
در صورت استفاده از اینورتر ها ، پمپ ها بصورت پیوسته کار می کنند.
سرعت آنها با افزایش سطح مایع در چاه افزوده می شود.
بدین ترتیب جریان ورودی با جریان خروجی متناسب گشته و پروسه بصورت یکنواخت انجام می گیرد.
تکنولوژی الکترونیک قدرت و کنترل کننده های دور موتور
تکنولوژی الکترونیک قدرت (Power Electronics) ، بهره وری و کیفیت فرایندهای صنعتی مدرن را بی وقفه بهبود میبخشد.
امروزه با کمک همین تکنولوژی امکان استفاده از منابع انرژی غیرآلاینده بازیافتی (ReneWable Energy ) ،
نظیر باد و فتو ولتائیک فراهم شده است.
تخمین زده میشود که :
با استفاده از الکترونیک قدرت، حدود ۱۵ تا ۲۰ درصد امکان صرفه جوئی انرژی الکتریکی وجود دارد.
در واقع با کاهش بی وقفه قیمت ها در عرصه الکترونیک قدرت،
زمینه برای حضور آنها در کاربردهای صنعتی، حمل ونقل و حتی خانگی فراهم میگردد.
سخن پایانی //
مزیت های استفاده از کنترل کننده های دور موتور
مزایای استفاده از کنترل کننده های دور موتور هم در بهبود بهره وری تولید و هم در صرفه جویی مصرف انرژی در کاربرد های نظیر فن ها ، پمپ ها ، کمپرسور ها و دیگر محرکه های کارخانجات ، در سال های اخیر کاملا مستند سازی شده است.
کنترل کننده های دور موتور کاملا قادرند مشخصه های بار را با مشخصه های موتور تطبیق دهند.
اینورتر ها توان راکتیو ناچیزی از شبکه دریافت می کنند .
لذا نیازی به تابلو های اصلاح ضریب و خازن ها ندارند.
در زیر به مزایای استفاده از کنترل دور موتور اشاره شده است :
- در صورت استفاده از کنترل کننده های دور موتور در مقایسه با کنترلرهای مکانیکی ، در کنترل جریان سیالات ، بطور موثری در مصرف انرژی صرفه جویی حاصل میشود.
این صرفه جویی علاوه بر پیامدهای اقتصادی آن موجب کاهش آلاینده های محیطی نیز میشود. - کنترل کننده های دور موتور قادرند موتور را نرم راه اندازی کنند و این ویژگی موجب میشود علاوه بر جلوگیری از تنش های الکتریکی روی شبکه ، از شوک های مکانیکی به بار نیز جلوگیری شود.
این شوک های مکانیکی میتوانند باعث استهلاک سریع قسمتهای مکانیکی ، بلبرینگ ها و کوپلینگ ها ، گیربکس.نهایتا قسمتهایی از بار شوند.
راه اندازی نرم هزینه های نگهداری را کاهش داده و به افزایش عمر مفید محرکه ها و قسمت های دوار منجر خواهد شد . - جریان دریافتی از شبکه در هنگام راه اندازی موتور با استفاده از درایو 0% جریان اسمی موتور است.
(البته در کاربردهایی مثل جرثقیل و آسانسور امکان دارد مکش جریان راه اندازی حاصل شود) - در صورتی که نیاز بار ایجاب کند با استفاده از کنترل کننده دور ، موتور میتواند در سرعت های پایین با گشتاور 100% کار کند.
- کار در سرعت های کم منجر به کاهش هزینه های تعمیر و نگهداشت ادواتی نظیر بلبرینگ ها ، شیر های تنظیم کننده و دمپر ها خواهد شد .
- یک اینورتر فرکانس متغییر قادر است رنج تغییرات دور را ، نسبت به سایر روش های مکانیکی تغییر دور ، به میزان قابل توجهی افزایش دهد.(اگر در سیستم های مکانیکی شما 10 نقطه برای تنظیم سرعت موتور داشته باشین با نصب یک اینورتر رو همان موتور میتوانید به میزان 100% قابلیت تعیین سرعت داشته باشید و این دقت عملکرد اوپراتور و ماشین رو بسیار افزایش میدهد)علاوه بر آن از مسایلی چون لرزش و تنش های مکانیکی نیز جلوگیری خواهد شد .
- کنترل کننده های دور مدرن امروزی با قابلیت های ویژه نرم افزاری قوی خود قادرند راه حل های متناسبی برای کاربردهای مختلف صنعتی ارائه دهند.
دانلود فایل کنترل کننده های دور موتور یا اینورتر ها چگونه عمل میکنند




سلام خدا قوت
آیا با اینورتر میشه هر یک ثانیه دور موتور رو چپ و راست کرد،
ممنون از پاسخگویی
با سلام
ایا می شود یک کمپرسور اسکرال سه فاز ۳۸۰ ولت را بوسیله VFD با جریان تک فاز ۲۲۰ ولت راه اندازی کرد؟؟
ایا کاهش گشتاور خواهیم داشت؟
توان نامی کمپرسور ۳.۵ اسب بخار است. درایور چند کیلو وات باید باشد؟؟؟
شما درایور مناسب این کاربرد را دارین؟
سلام و وقت بخیر
بنده برای پروژه کارشناسیم قرار هست یک کنترل کننده موتور القایی با روش شار ثابت رو پیاده سازی کنم، میخواستم بدونم منبعی هست که بگه دقیقا برای این مدار چه قطعاتی رو باید تهیه کنم؟ ممنون میشم راهنمایی کنین.
باتشکر
درود و روز بخیر
آیا این امکان وجود داره با توجه به اینکه برق کشور ما ۵۰ هرتز هست، برای ایجاد دور بیشتر و بهره وری بیشتر از موتور فرکانس کاری موتور را به بالاتر از ۵۰ هرتز برد؟
یعنی میخوام بگم اگر فرکانس ورودی ما در برق ورودی ۵۰ هست آیا این امکان وجود داره که برای موتور این فرکانس به بالاتر قرار داد مثلا ۶۰ هرتز؟ و اگر میشه کلا تا چه مقدار میتونیم از فرکانس ورودی بالاتر بریم وایا موتور ما آسیب نمیبینه اینکار اصلا مجاز هستیم بکنیم؟
سلام
میشه با اینورتر فرکانس خروجی رو تا سه هزار هرتز بالا برد ولی موتور هایی که طراحی شدن برای فرکانس ۵۰ باید در همان بازه ازشون استفاده کرد طبق تجربه تا فرکانس ۷۰ اگر دچار افزایش جریان در موتور نشوید میتوان فرکانس رو بالا برد. اگر نیاز به فرکانس کاری بالاتر دارین موتور هایی هستند که طراحی شدن برای فرکانس های ۱۰۰ و ۲۰۰ و ۳۰۰ و ۴۰۰ هرتز.
با سلام
من وقتی دور موتور یه تجهیز رو به مثال ۷۰ میدم این یعنی توی یه بازه زمانی دور موتور بهد۷۰ باید برسه یا اینکه نه زور زدن موتور به ۷۰ رسوندیم ک کار بیشتری ازش بخوایم؟؟
در لحظه استارت
سلام در اینورتر ها شما به صورت پیش فرض دور موتور رو کنترل میکنید و مهمولا عدد نمایشگر فرکانس را نمایش میدهد و اعشار های نمایشگر نشان دهنده فرکانس کاری است که شما درخواست کردید و به مدل درایو هم بستگی دارد. دور موتور یک مقوله است زمان شتاب گیری موتور هم مقوله ای متفاوت است. سوال شما واضح نیست.ممنون میشم دقیق تر بفرمایید و حتما مدل اینورتر هم ذکر شود.
مد کنترلی IFD واینکه ایا کسینوس فی پلاک موتور رابایدجهت تنظیم اینورتر وارد کنیم؟
سلام .
هرچه پارامترهای خواسته شده درست تنظیم شود بهتر است ولی به صورت اصولی و طبق گفته راهنمای فنی سینوس پنا صفحه ۴۰ تنظیم پارامتر های فوق که در ذیل معرفی میشود کفایت میکند.
– C015 (fmot1) rated frequency
– C016 (rpmnom1) rated rpm
– C017 (Pmot1) rated power
– C018 (Imot1) rated current
– C019 (Vmot1) rated voltage
– C029 (Speedmax1) max. allowable speed.
با سلام خدمت شما مهندس عزیز:
در درایو سانترنو(پنتا)کسینوس فی پلاک موتور را اگر لازم هست برروی چه پارامتری باید تنظیم کرد؟
با تشکر
منظورتون کدوم پارامتر است ؟ و قصد دارین در کدام مد کنترلی درایو رو راه اندازی میکنید؟